Development of a submarine optically pumped magnetometer
GONG Yi-Xuan1(), JIANG Kai1, GAO Jing-Yu2, ZHU Wan-Hua2, CHEN Kai1()
1. School of Geophysics and Information Technology, China University of Geosciences (Beijing), Beijing 100083, China 2. Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing 100094, China
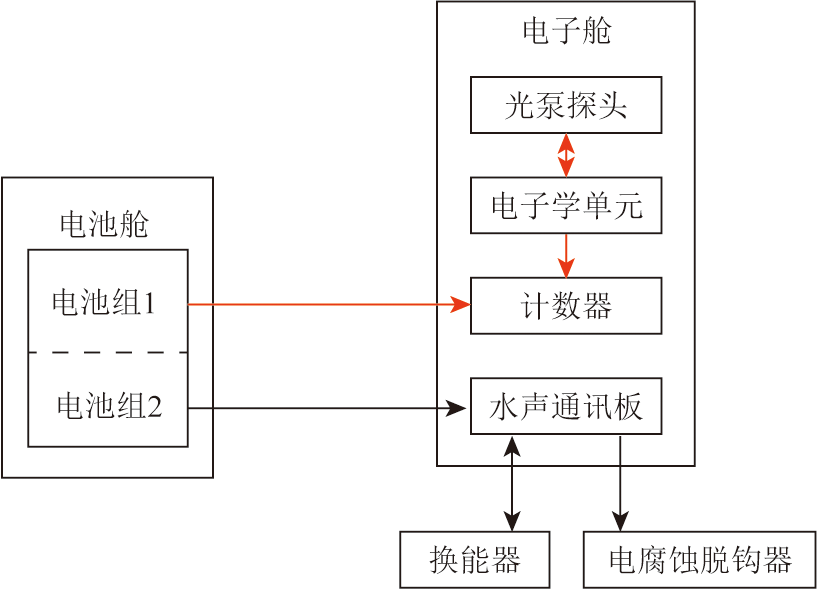
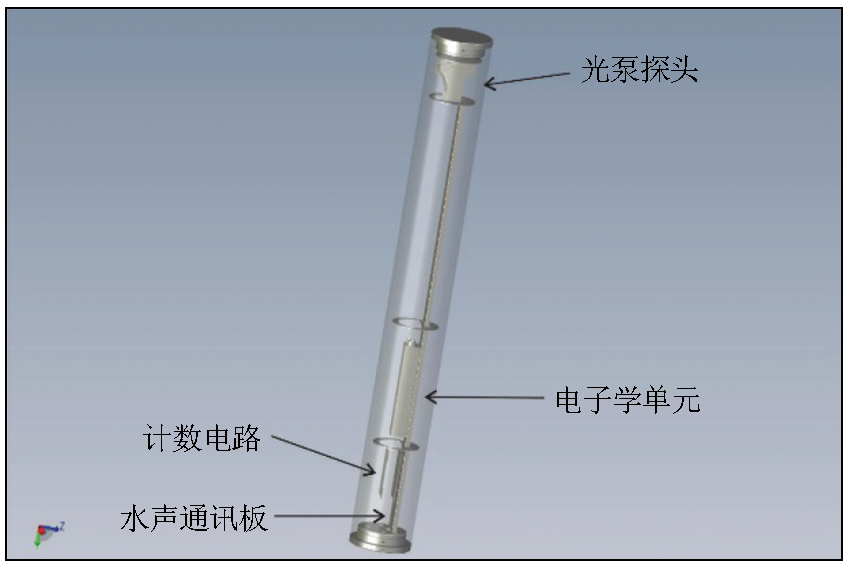
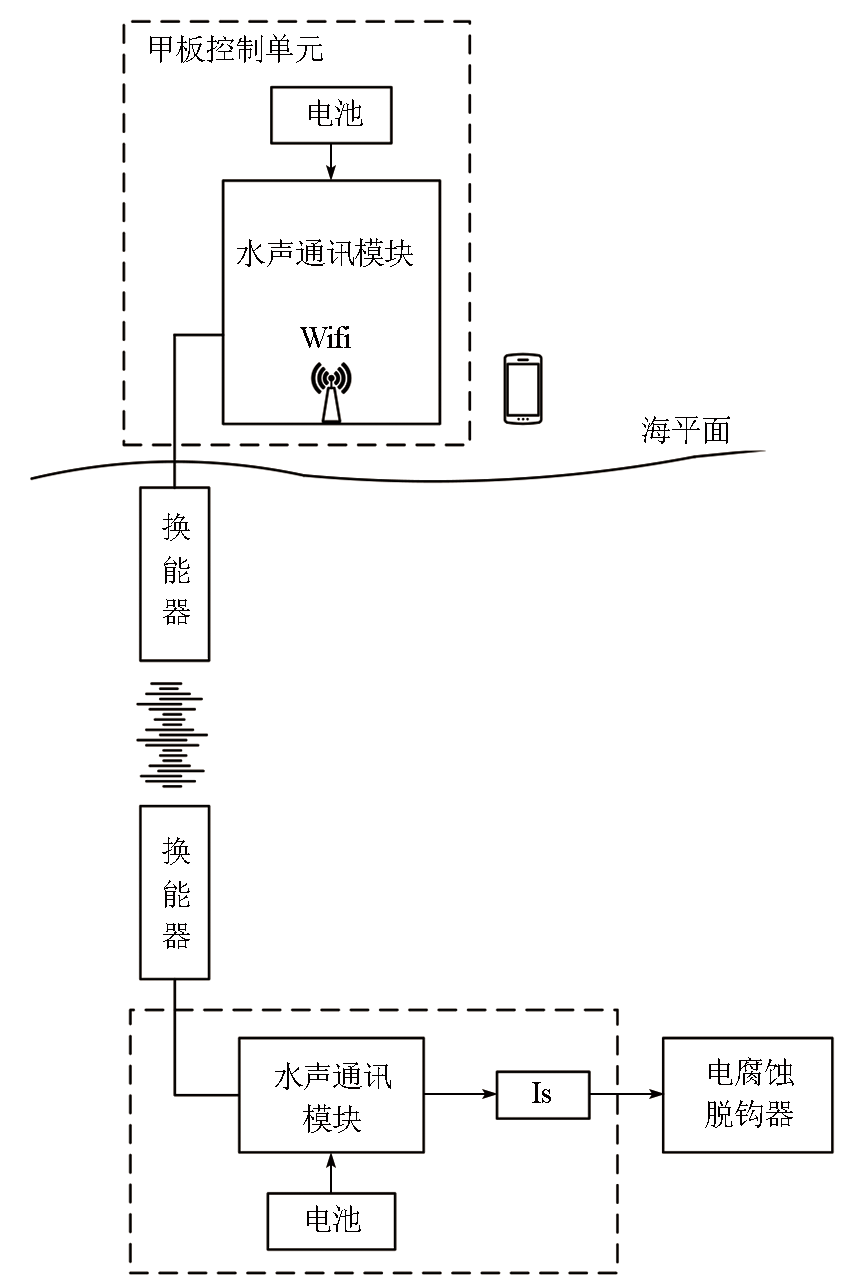
The Autonomous Underwater Vehicle (AUV) equipped with a magnetometer conducts underwater magnetic anomaly detection, enabling long-duration and large-scale continuous sampling. It offers advantages such as concealment, high efficiency, high practicality, wide application range, strong maneuverability, and robust endurance. To improve measurement accuracy, synchronous seabed magnetic field data is needed as a reference to counteract environmental magnetic noise. To address this, a submarine optically pumped magnetometer was developed to provide a reference for processing AUV magnetic anomaly detection data.The submarine optically pumped magnetometer consists of a magnetic field measurement unit and an acoustic release unit, capable of high-precision autonomous acquisition of the total magnetic field on the seabed, as well as underwater acoustic release and recovery. The magnetic field measurement unit includes an optical pumping probe, electronic unit, counter, battery pack, and nylon pressure chamber. The acoustic release unit includes an acoustic transducer, acoustic communication board, electro-corrosion decoupler, cement block, buoyancy block, and frame. This design addresses key technical challenges such as miniaturization, autonomous acquisition, and underwater acoustic communication.In 2022, a magnetic anomaly detection test was conducted in the offshore waters of Qingdao. The test results verified the autonomous seabed magnetic field acquisition and the release and recovery functions of the submarine optically pumped magnetometer, providing effective reference data for underwater target detection.
Chen Y F, Liu W. Brief analysis of new non-acoustic submarine detecting technologies[J]. Optical Fiber & Electric Cable and Their Applications, 2016(6):29-32,36.
[3]
Fagnard J F, Vanderheyden B, Pardo E, et al. Magnetic shielding of various geometries of bulk semi-closed superconducting cylinders subjected to axial and transverse fields[J]. Superconductor Science and Technology, 2019, 32(7):074007.
[4]
王芙蓉. 水下金属目标探测方法研究[D]. 太原: 中北大学, 2024.
[4]
Wang F R. Research on(detection method of) underwater metal target[D]. Taiyuan: North University of China, 2024.
[5]
Sharp K M, White R H. More tools in the toolbox:The naval oceanographic office's Remote Environmental Monitoring UnitS (REMUS) 6000 AUV[C]// Oceans,IEEE, 2008.
[6]
Adams A A, Charles P T, Veitch S P, et al. REMUS100 AUV with an integrated microfluidic system for explosives detection[J]. Analytical and Bioanalytical Chemistry, 2013, 405(15):5171-5178.
doi: 10.1007/s00216-013-6853-x
pmid: 23539095
[7]
Bondaryk J E. Bluefin autonomous underwater vehicles:Programs,systems,and acoustic issues[J]. The Journal of the Acoustical Society of America, 2004, 115(5s):2615.
[8]
Marthiniussen R, Vestgard K, Klepaker R A, et al. HUGIN-AUV concept and operational experiences to date[C]//[C]// Oceans'04 MTTS/IEEE Techno-Ocean'04, 2004.
[9]
McPhail S, Furlong M, Huvenne V, et al. Autosub6000:Its first deepwater trials and science mission[J]. Underwater Technology, 2009, 28(3):91-98.
[10]
Ura T, Obara T, Nagahashi K, et al. Introduction to an AUV"r2D4" and its kuroshima knoll survey mission[C]// Oceans'04 MTS/IEEE Techno-Ocean'04, 2004.
[11]
Fisher A W, Nidzieko N J, Scully M E, et al. Turbulent mixing in a far-field plume during the transition to upwelling conditions:Microstructure observations from an AUV[J]. Geophysical Research Letters, 2018, 45(18):9765-9773.
Li H. Research on opto-mechanical system design and anti-vibration performance of aviation laser pumped 4He magnetic sensor[D]. Changchun: University of Chinese Academy of Sciences, 2022.
Chen D Y, Shi Y C, Cui J Z, et al. Development of rotating magnetic field device for vector atomic magnetometers[J]. Optics and Precision Engineering, 2022, 30(7):780-792.
Wu D W, Miao Q, He S X, et al. A study of existing status and prospects for quantum sensor in navigation[J]. Journal of Air Force Engineering University:Natural Science Edition, 2021, 22(6):67-76.
Li Q M, Zhang J H, Zeng X J, et al. Effect of the geomagnetic field on the resonance spectral lines of the Cs magnetometer[J]. Journal of Harbin Engineering University, 2013, 34(12):1617-1620.
Zhou Z J, Cheng D F, Wang J, et al. Development of magneto-dependent sensor in the optical pumped magnetometer[J]. Chinese Journal of Sensors and Actuators, 2009, 22(9):1284-1288.
[22]
Alexandrov E B. Recent progress in optically pumped magnetometers[J]. Physica Scripta, 2003, T105(1):27-30.
Peng Z, Deng M, Zhao J G. The Hardware and software realization of electromagnetic triggered acoustic releaser's underwater unit[D]. Beijing: China University of Geosciences Beijing, 2020.
Luo X H, Deng M, Qiu N, et al. MicrOBEM:A micro-ocean-bottom electromagnetic receiver[J]. Geophysical and Geochemical Exploration, 2022, 46(3):544-549.