

0 引言
20世纪50年代末期,世界上第一台真正意义上的自主水下航行器系统平台“SPURV”在美国华盛顿大学问世,主要用于水文调查。美国伍兹霍尔海洋研究所研制的“REMUS”系列AUV,主要用于水雷侦查以及海底资源勘查[5-6]。美国海军研究生院和金枪鱼机器人技术公司合作开发的“Bluefin”系列AUV是现阶段技术较为成熟的AUV系统平台,已装备于美国海军,最大潜水深度达到4 500 m,搭载了侧扫声呐、合成孔径声呐、多波束声呐等多种探测传感器,为水下环境的感知理解和智能决策提供原始数据支撑[7],在水雷探测、海洋环境情报收集和海底探测领域均有成功应用。挪威Kongsberg公司和挪威国防研究机构合作研制的“HUGIN”系列AUV,广泛应用于海上石油设备和海底电缆管线检测,以及海洋科学调查[8]。英国南安普敦国家中心设计了“Autosub”系列AUV并成功执行了200余次的海洋科学调查任务[9]。日本东京大学在“R-one”AUV平台的基础上研制的“r2D4”AUV搭载了多种传感器,在3D海底地形构造观察、热液喷口区域的科学考察等作业任务中扮演重要角色[10]。
我国于20世纪90年代开始研制AUV系统平台,经过30年的潜心研究,先后研发出一系列的AUV装备产品,并取得了在大深度、长航程等技术指标上的突破,有力地支撑了海洋环境监测、海底资源探测以及海洋安全防卫等领域的发展。以中国科学院沈阳自动化研究所、哈尔滨工程大学、中船重工710研究所等为代表的科研院校是我国具有代表性的较早开展AUV系统研究的单位。在项目的支撑下研发了一系列的AUV平台,最大下潜深度达到11 000 m,为海洋生物学、海洋地质等学科提供了丰富的海洋环境数据,强有力地促进了这些学科的发展。具有代表性的如“潜龙”系列潜水器。“潜龙一号”AUV是我国第一台实用化的深海AUV,下潜深度达到6 000 m,自2013年起多次承担多金属结核区域的探测任务,是我国海洋科考调查船配套的成熟装备。“潜龙二号”AUV在“潜龙一号”AUV的基础上进行了优化,具有非回转体立扁水动力外形,其目的在于使AUV适应西南印度洋热液区复杂地形作业的需要。
为提高海洋数据采集的质量和预测海洋环境特征的能力,AUV水下作业需要海底基站作为参考来评估磁场环境噪声。现有的高精度磁力仪主要包括磁通门磁力仪(fluxgate magnetometer)、超导量子干涉仪(superconducting quantum interference device, SQUID)、质子旋进磁力仪(proton precession magnetometer, PPM)、光泵磁力仪(optically pumped magnetometer, OPM)等[13⇓-15]。目前使用的海底基站主要是Overhauser磁力仪,它是一种基于动态核极化效应测量总磁场的标量磁力仪。GSM-19 Overhauser磁力仪灵敏度小于0.015 nT,绝对精度优于0.1 nT,带宽为15~30 kHz,梯度容限优于10 000 nT/m[16],功耗较低且没有死区问题,但采样率较低。Cs-3高精度铯光泵磁力仪灵敏度小于0.000 6 nT,绝对精度优于2.5 nT,带宽只受磁力仪所采用的处理器限制,梯度容限优于40 000 nT/m[17],功耗较高且死区无法消除,采样率较高。Overhauser磁力仪与铯光泵磁力仪相比的局限性表现在灵敏度低、带宽窄,适用的频率范围有限、采样率低、梯度容忍度小等方面[18]。综合对比灵敏度、精度、带宽、能耗、成本等技术指标,选择光泵磁力仪作为AUV载荷。为提升AUV水下作业的测量精度,需要海底同步观测的磁场数据作为参考,以抵消磁场环境噪声。为此,开发海底光泵磁力仪,获取地磁环境背景噪声,为AUV磁异探测数据处理提供参考。所研制的海底光泵磁力仪由磁场测量单元和水声释放单元两部分组成,具备海底磁总场高精度自容采集能力,并具备海底水声释放回收能力。重点解决了小型化、自容采集、水声通讯等技术难题。
1 总体设计
综合稳定可靠性、测量精度、功耗、灵敏度、成本等因素,海底光泵磁力仪由磁场测量与水声释放两部分组成。其中,磁场测量功能主要由光泵探头、电子学单元、计数器和电池舱等实现。光泵探头用于实现工作原子在待测外磁场中的光泵浦作用和磁共振作用,将对赛曼子能级间隔跃迁频率的测量转换为对投射光信号的探测;电子学单元的作用是检测光信号的幅值、相位和频率信息,然后通过反馈回路控制射频磁场的变化频率使之稳定在共振点;计数器对驱动电路输出的信号进行测频、计数、存储;电池舱为光泵磁力仪提供电能。水声释放功能主要由换能器、水声通讯板和电腐蚀脱钩器等实现。换能器将水声信号与电信号相互转换;电腐蚀脱钩器区别于机械声学释放器,借助电化学原理将熔断实现脱钩释放;水声通讯板完成换能器对海底仪器的命令解析与编码大功率发送。
海底光泵磁力仪硬件原理如图1所示,硬件包括电子舱、电池舱、换能器和电腐蚀脱钩器等。电子舱内置光泵探头、电子学单元、计数器、水声通讯板等。电池舱为光泵计数器和水声通讯板提供电能。
图1
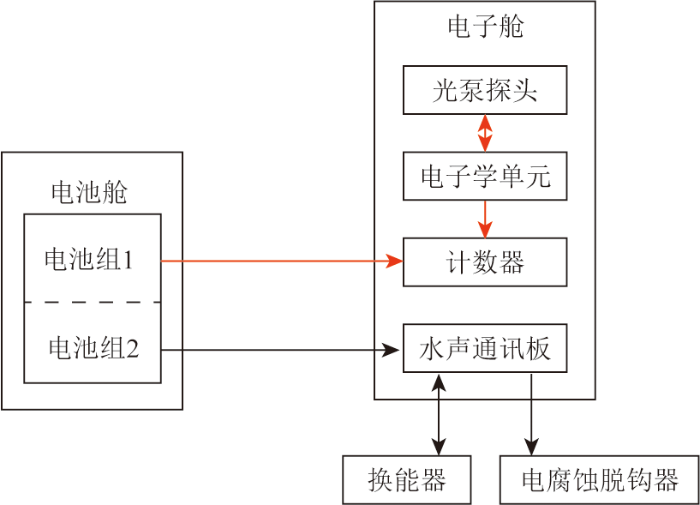
图1
海底光泵磁力仪硬件原理
Fig.1
Hardware schematic of submarine optical pump magnetometer
图2为海底光泵磁力仪电子舱内部结构,包括光泵探头、电子学单元、计数电路、水声通讯板等。为减小电子学单元对探头的电磁干扰,光泵探头拟垂直安装于框架的顶部,远离电子学单元。
图2
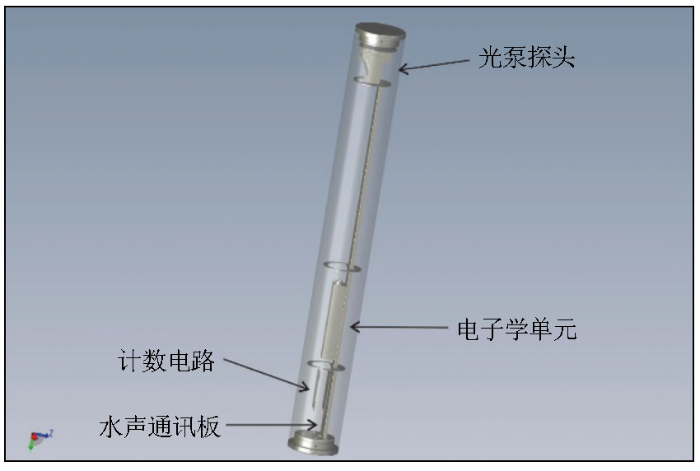
图2
海底光泵磁力仪电子舱内结构示意
Fig.2
Schematic diagram of the structure inside the electronic chamber of the submarine optical pump magnetometer
2 结构设计
结合水下作业环境和光泵磁力仪工作特征,从释放回收、浮力、压力舱和水声通讯4个方面开展结构设计。在释放回收方面,设计了电腐蚀脱钩器和水泥块。当水声通讯板收到“电腐蚀开”命令时,使能内置恒流源,电腐蚀脱钩器的腐蚀片在恒流源电解作用下逐渐熔断,实现电腐蚀释放机制。水泥块为仪器下沉时提供水下重量,同时防止仪器在海底作业时受底流冲击而发生位移;在浮力设计方面,浮力块为仪器上浮时提供浮力,其采用标准预制件,尺寸为D200 mm×L300 mm,单块提供5 kg浮力,设计使用6块浮力块,提供30 kg浮力;在压力舱设计方面,电子舱为尼龙压力舱,为内置的光泵探头、电子学单元、计数电路、水声通讯板模块提供水密耐压工作环境。电子舱内置光泵探头,为保证磁洁净度和磁场观测带宽,采用尼龙材料加工耐压舱,耐压深度100 m,外尺寸D158 mm×L1320 mm,水下重量约为5 kg。尼龙材料相比金属材质具有无磁干扰、磁场稳定性好、耐腐蚀、低密度、高强度的优势,性价比高。电池舱为铝合金舱,为内置的两个电池组模块提供水密耐压工作环境。内尺寸为D135 mm×L500 mm,外尺寸为D163 mm×L585 mm,水下重量约为15 kg。压力舱均通过1.5 MPa保压2 h测试,未发生形变和渗漏;在水声通讯方面,通过船载甲板单元向位于海底的仪器发送声学命令,仪器执行电腐蚀后脱开水泥块上浮。水声通讯板与外置的换能器配合,实现水声测距、电腐蚀开关。水声通讯实现与甲板遥控端的水声命令解析、状态信息回传、电腐蚀装置触发等。通过水声通讯模块可以查询仪器的状态信息,包括电压、温度、距离、噪声能量、信号能量、电腐蚀状态等参数。
如图3,海底光泵磁力仪主要由框架、浮力块、水泥块、电腐蚀脱钩器、电池舱、电子舱、换能器等组成。电池舱位于框架的底部,水平放置。
图3

图3
海底光泵磁力仪海上投放
Fig.3
Deployment diagram of submarine optical pump magnetometer at sea
海底光泵磁力仪主要技术参数:
1)通道:单通道,总场;
2)最大工作水深:100 m;
3)水下连续工作时间:不少于7天;
4)量程:20~120 μT;
5)本底噪声水平:优于1.0 pT/rt(Hz)@1 Hz;
6)采样率:640 Hz/160 Hz/40 Hz;
7)存储空间:32 GB;
8)功耗:28 W;
9)体积:0.7 m×0.7 m×1 m;
10)质量:120 kg。
3 光泵磁力仪
3.1 光泵探头
光泵磁力仪工作时,磁传感探头处于待测磁场,探头中的铯吸收气室含有铯原子团,泵浦激光照射铯原子使之发生光泵浦作用,最终各粒子的塞曼子能级处于偏极化分布。探头中的射频线圈给铯吸收气室提供一个均匀的射频磁场,适当频率的射频磁场使偏极化的铯原子发生磁共振作用,各粒子会逐步去极化,当偏极化与去极化过程达到动态平衡时,发生光磁共振效应。泵浦激光透过铯吸收气室后,以射频信号频率形式发生变化,并由光电探测器接收后转换为电信号。
3.2 电子学单元
电子学单元的任务就是检测磁传感探头输出的光电探测信号,即拉莫尔频率信号的幅值、相位和频率信息,然后通过反馈控制回路再驱动射频线圈,使射频信号频率最后锁定在磁共振点,共振频率与外磁场强度成线性关系,测量此频率即可计算得到外磁场强度。
3.3 计数电路
电子学单元的拉莫尔频率信号通过变压器耦合到电源线输出,频率为50~350 kHz,幅值约为300 mVpp。首先对拉莫尔频率进行信号分离,将拉莫尔信号从电源线分离;其次对拉莫尔信号进行低通滤波,滤除带外噪声;最后通过超高速迟滞比较器输出低抖动的数字逻辑信号。计数电路框如图4所示。
图4

系统设计采用高性能FPGA实现频率测量、逻辑和时序控制等相关任务。具体实现功能如下:测量光泵磁力仪输出的拉莫尔频率磁场;控制任何与时间相关任务的调度和执行,包括时钟同步等;采集电压、电流、温度等系统状态参数;数据收集与数据缓冲;与CPU的指令交互和数据传输等。
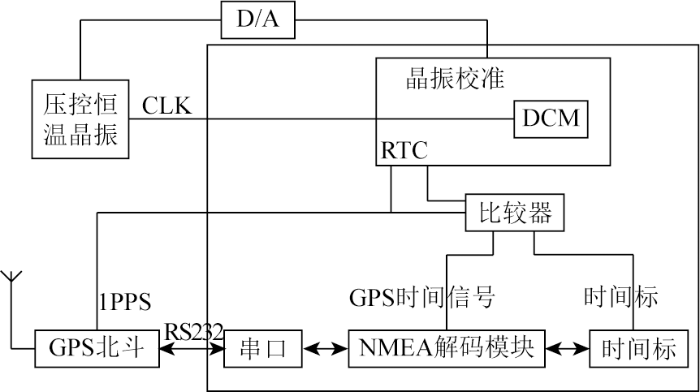
光泵磁场测量值是以系统时钟源为参考计算的。因此,系统基准源的绝对精度决定了磁场测量的准确性。为实现高准确度的磁场测量,设计如图5所示电路,利用GPS秒脉冲的长稳特性与恒温晶振的短稳特性,通过实时计数并反馈调节恒温晶振,使其输出高准确度的时钟频率。
图5
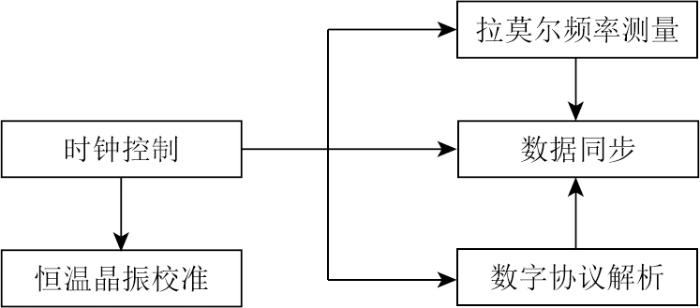
FPGA程序主要包括时钟控制模块、拉莫尔频率测量模块、数字协议解析模块、恒温晶振校准模块、数据同步模块,如图6所示。时钟控制模块为FPGA各模块提供基准时钟源。拉莫尔频率测量模块完成双通道的频率测量。数字协议解析模块完成温度、电压、电流监控等数字协议解析。恒温晶振校准模块通过计算秒脉冲和系统时钟偏差,控制DAC输出反馈电压,进而调节晶振输出频率。数据同步模块用于同步光泵测频数据等参数,同时把同步后数据按帧进行缓存。
图6
4 水声释放模块
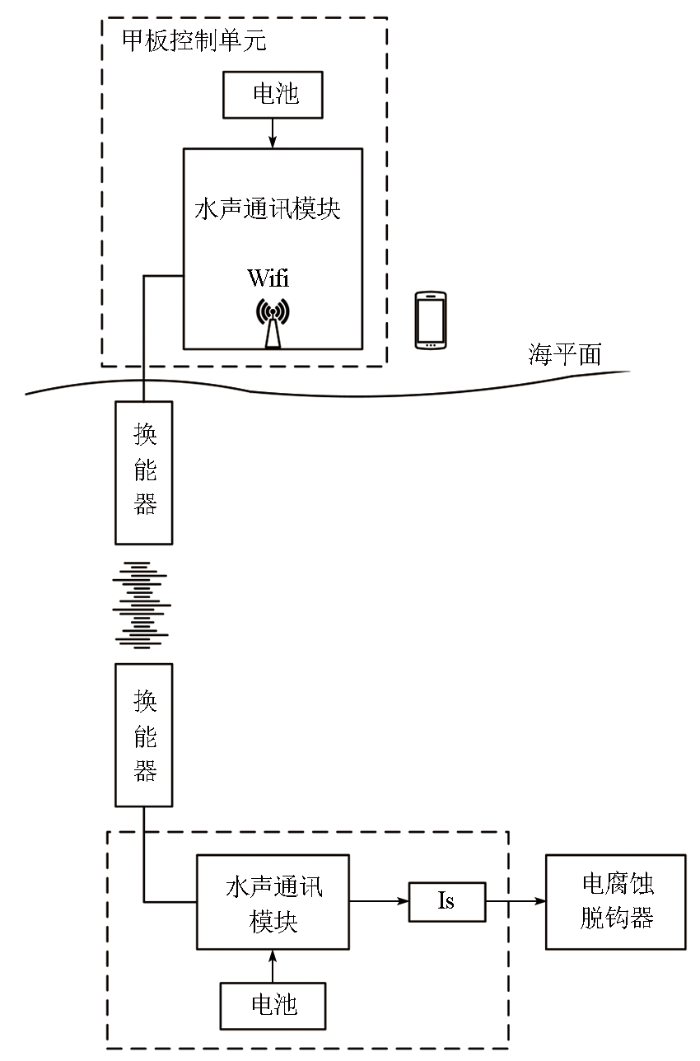
传统的声学释放器以iXblue公司的Oceano 2500 Universal型号为例,其空气中质量为30 kg,水中质量为22 kg,尺寸为D143 mm×L849 mm[24]。针对海底磁测应用场景,传统声学释放器在体积、重量、成本方面存在局限性。海底光泵磁力仪创新采用水声通讯模块方案[25],水声释放模块由水面和水下两个部分组成。水面部分由甲板控制单元、用户终端和换能器组成,水下部分由换能器、水声通讯板、电腐蚀脱钩器、电池组成。水面和水下两部分的组合实现了声学测距和电腐蚀开关功能。换能器用于声电信号相互转换,其尺寸为D106 mm×H76 mm,水下质量为1.5 kg。水声通讯板完成换能器对海底仪器的命令解析与大功率编码发送,其尺寸为D68 mm×H50 mm,水下质量为0.5 kg。水声释放模块工作示意如图7所示,甲板控制单元借助Wifi与用户终端进行通讯,用户终端运行APP程序,即可发送查询、电腐蚀开关命令。水下端的水声通讯板通过换能器采集来自甲板单元发送的信号,并对其进行解析。在接收到“查询”命令后,发送应答信号,水面甲板控制单元解算状态信息(包括电池电压、温度、斜距)。在接收到“电腐蚀开”命令后,使能恒流源,电流向外输出约为0.7 A,腐蚀片约30 s后熔断,杠杆抬起,钢丝绳松开,仪器脱离水泥块上浮。基于水声通讯控制软件,可以选择仪器的序列号,改变增益、信号传输幅度和响应幅度,并控制电腐蚀的开关状态。查询状态返回设备状态屏幕,查看电压、温度、距离、噪声能量、信号能量和电腐蚀开关状态等参数。电腐蚀脱钩器与传统的声学释放器相比,在水中重量减少为原来的23%,体积压缩为原来的26.5%,成本降低为原来的30.7%。
图7
5 测试
5.1 磁力仪测试
为了评估铯光泵磁力仪CAS-18与国外同类产品的性能,选择磁场均匀的野外空旷地带作为试验探测地点。同点布置加拿大Scintrex公司的高精度铯光泵磁力仪Cs-3和本文所选用的铯光泵磁力仪CAS-18,进行仪器一致性对比测试,测试现场如图8所示。
图8
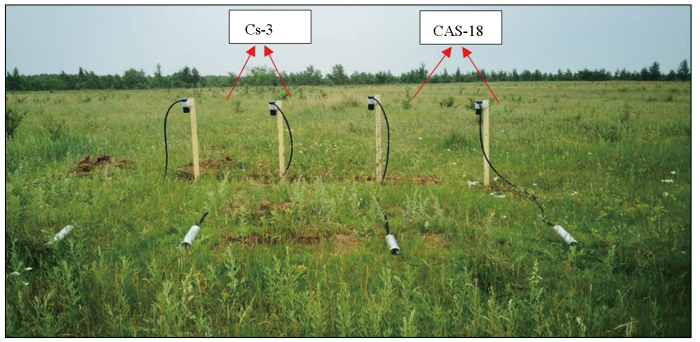
图9
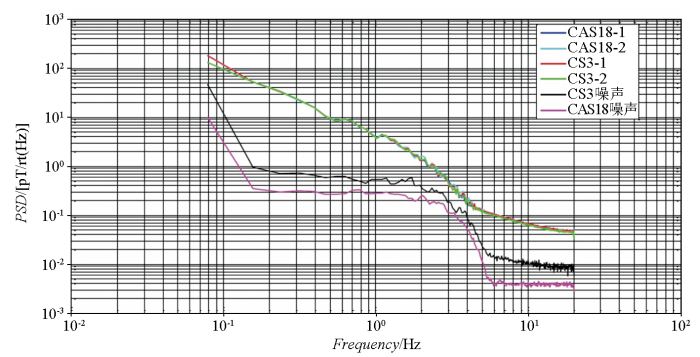
图9
不同光泵磁力仪本底噪声水平对比测试结果
Fig.9
Results of background noise level comparison for different optical pump magnetometer
5.2 整机陆地测试
在磁干扰较低的野外环境下进行陆地试验测试,可以测得稳定的数据来校验仪器精度。试验场地位于青岛市黄岛区一处磁场分布均匀且磁干扰小的区域。测量时,把一台海底光泵磁力仪放置在试验场地内进行短期地磁场测量,试验人员持已知磁异模块多次经过海底光泵磁力仪。陆地试验的磁场测试数据如图10所示,其中的两处局部放大图是已知磁异模块经过仪器时所产生的磁异常信号波形。仪器采样率为160 Hz,在1 061 s时,出现第一次已知磁异常信号,持续时间约5 s,峰峰值约为3 537 nT。在2 444 s时,出现第二次已知磁异常信号,持续时间约4 s,峰峰值约为1 990 nT。
图10
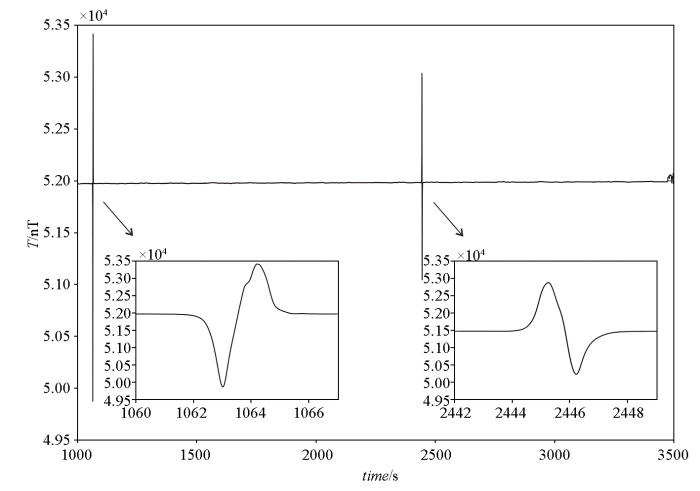
图10
海底光泵磁力仪陆地测试结果
Fig.10
Land-based test results of the submarine optical pump magnetometer
5.3 海上测试
为了评估海底光泵磁力仪的性能,于2022年10月在青岛近海海域开展了磁异探测试验,实现海底磁总场高精度自容采集、存储,为水下目标探测提供原始数据支撑。一共进行了5次海上投放测试,回收率100%,电腐蚀脱钩器的释放功能得到验证。测试地点是青岛市团岛湾近海试验站,海况2级,水深50 m。海试设备为1台海底光泵磁力仪,配套设施包括配套作业船、近海测试船。借助水声通讯板、换能器和电腐蚀脱钩器装置,5次投放全部回收成功,数据完整,水下作业时间约200 h,未发现异常。海底光泵磁力仪在海底连续测量约6 h,采样率为160 Hz。截取部分时段所观测地磁总场时间序列见图11,持续长度10 000 s,总场约为51 760 nT,峰峰值约为84.1 nT,其中包含大地电磁噪声、运动海水感应电磁噪声以及近岸人文工业干扰等环境噪声。
图11
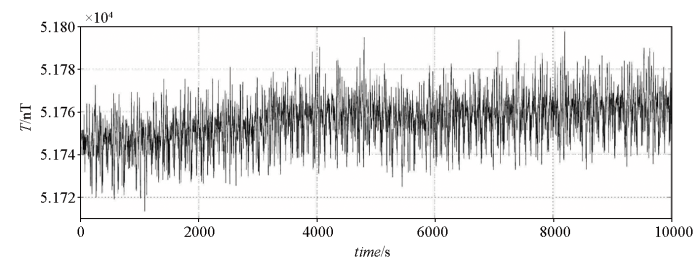
图11
海底地磁总场部分时段时间序列
Fig.11
Partial time series of the total submarine geomagnetic field
对海底光泵磁力仪所观测的地磁总场数据进行功率谱密度分析,结果见图12。整体呈现1/f特征,低频段从10 Hz~20 mHz,随着频率增大,功率谱密度逐渐减小;在50 Hz频段附近,海底环境噪声影响较大;在1 Hz附近,地磁总场数据中开始出现浪涌。成功获取了地磁环境背景噪声,为AUV磁异探测数据处理提供参考。
图12
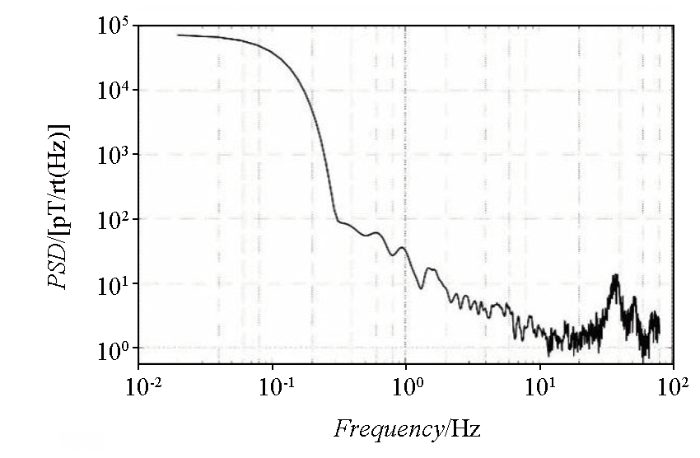
图12
海底地磁环境背景场功率谱密度
Fig.12
Power spectral density of the background field in the submarine geomagnetic environment
由磁力仪测试结果可知,铯光泵磁力仪CAS-18更适用于高精度磁力测量和需要低噪声环境的应用场景。由陆地测试和海上测试结果可知,海底光泵磁力仪在海底与陆地的磁场强度具有一致性。而且海底光泵磁力仪的稳定性和可靠性很强,受到磁干扰后产生的磁异常信号持续时间较短,不会对测量磁场强度产生较大的影响。在海上测试获取的海底环境背景场噪声可以作为参考来抵消磁场环境噪声,提高AUV磁异探测数据的测量精度。
6 结论
本文研制的海底光泵磁力仪,主要解决了小型化、自容采集、水声通讯等技术难题。海底光泵磁力仪由磁场测量单元、水声释放单元两部分组成,具备海底磁总场高精度自容采集能力,并具备海底水声释放回收能力。海底采集站具有大数据量高速存储、低功耗、接收信号频率范围大、本底噪声低、可满足微弱信号探测等优势。在青岛近海海域开展磁异探测试验,采样率为160 Hz时,成功获取海底环境背景场噪声,为AUV磁异常探测数据的处理提供参考,以抵消磁场环境噪声。验证了海底光泵磁力仪的海底磁场自容采集、释放回收功能,为水下目标探测提供参考数据。同时证明了海底光泵磁力仪具有较好的稳定性和较高的可靠性,具有良好的应用前景。
参考文献
水声目标探测技术研究现状与展望
[J].
Underwater acoustic detection:Current status and future trends
[J].
非声探潜新技术浅析
[J].
Brief analysis of new non-acoustic submarine detecting technologies
[J].
Magnetic shielding of various geometries of bulk semi-closed superconducting cylinders subjected to axial and transverse fields
[J].
More tools in the toolbox:The naval oceanographic office's Remote Environmental Monitoring UnitS (REMUS) 6000 AUV
[C]//
REMUS100 AUV with an integrated microfluidic system for explosives detection
[J].
DOI:10.1007/s00216-013-6853-x
PMID:23539095
[本文引用: 1]

Quantitating explosive materials at trace concentrations in real-time on-site within the marine environment may prove critical to protecting civilians, waterways, and military personnel during this era of increased threat of widespread terroristic activity. Presented herein are results from recent field trials that demonstrate detection and quantitation of small nitroaromatic molecules using novel high-throughput microfluidic immunosensors (HTMI) to perform displacement-based immunoassays onboard a HYDROID REMUS100 autonomous underwater vehicle. Missions were conducted 2-3 m above the sea floor, and no HTMI failures were observed due to clogging from biomass infiltration. Additionally, no device leaks were observed during the trials. HTMIs maintained immunoassay functionality during 2 h deployments, while continuously sampling seawater absent without any pretreatment at a flow rate of 2 mL/min. This 20-fold increase in the nominal flow rate of the assay resulted in an order of magnitude reduction in both lag and assay times. Contaminated seawater that contained 20-175 ppb trinitrotoluene was analyzed.
Bluefin autonomous underwater vehicles:Programs,systems,and acoustic issues
[J].
HUGIN-AUV concept and operational experiences to date
[C]//[C]//
Autosub6000:Its first deepwater trials and science mission
[J].
Introduction to an AUV"r2D4" and its kuroshima knoll survey mission
[C]//
Turbulent mixing in a far-field plume during the transition to upwelling conditions:Microstructure observations from an AUV
[J].
海底AUV关键技术综述
[J].
A review of subsea AUV technology
[J].
矢量原子磁力仪中旋转磁场产生装置的研制
[J].
Development of rotating magnetic field device for vector atomic magnetometers
[J].
量子传感的导航应用研究现状与展望
[J].
A study of existing status and prospects for quantum sensor in navigation
[J].
海洋磁力仪的原理与技术指标对比分析
[J].
Principle of marine magnetometer and specification comparative analysis
[J].
地磁场对铯原子磁力仪共振谱线的影响
[J].
Effect of the geomagnetic field on the resonance spectral lines of the Cs magnetometer
[J].
氦光泵磁力仪中磁敏传感器的研制
[J].
Development of magneto-dependent sensor in the optical pumped magnetometer
[J].
Recent progress in optically pumped magnetometers
[J].
基于原子磁力仪的高精度电流传感器
[J].
High accuracy current sensor based on atomic magnetometer
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}