

0 引言
近年来,我国地质找矿虽取得一系列重大成果,但未来5~15年,对国外依存度仍会在较长时期内维持在较高水平,特别是重要矿产。国内尚未开发的矿产资源多集中于地形条件复杂的高海拔山区、人迹罕至的无人区等[1],因此亟须开展适用于复杂地形的探测方法与装备研究。瞬变电磁法作为矿产勘查的常用方法,现已发展了地面、航空、半航空等多种装置形式。随着无人机技术的不断成熟,基于无人机机载平台的半航空瞬变电磁法逐渐兴起,该方法将发射源置于地面,采用无人机挂载线圈在空中进行连续数据采集。半航空瞬变电磁探测系统能够突破复杂地形条件开展勘查工作,兼具航空瞬变电磁法工作效率高和地面瞬变电磁法勘探深度大的优势[2],在荒漠、山区等地形复杂地区的矿产勘探中,能够有效降低勘探风险,减少人为成本,提高勘查效率,具有良好的应用前景和发展空间。
在仪器系统设计和研发方面,国外的瞬变电磁仪器功能相对完善,性能稳定,数据解释软件成熟,在资源勘探、地质填图、工程勘察等领域获得了广泛应用。 Nabighian[3]在1987年率先对半航空瞬变电磁法进行了定义,开启了国内外地球物理勘探的新篇章; 1993年,Elliott以地面大回线源为激发源,使用直升机作为飞行平台搭载瞬变电磁接收设备,建立名为FLAIRTEM的半航空瞬变电磁勘探系统,沿用大定源解释方法进行数据解释与分析[4];该系统探测范围大,灵敏度高,但是需要大面积铺设激发源,故而对场地要求较高,在复杂地形条件下很难正常开展工作。1997年,Fugro公司借鉴航空瞬变电磁法,去除其激发源,以布设在地面的发射线圈作为激发源,形成TerraAir系统[5]。1998年,基于LOTEM的装置和解释方法,Mogi等研制了首套电性源半航空GREATEM半航空瞬变电磁系统,通过实验验证了该系统的有效行和可靠性,探测深度可达800 m[6-7]。我国在半航空电磁系统研究方面多以理论方法研究为主,仪器研制方面较晚。近年来,国内多个机构如吉林大学、长安大学、成都理工大学和中国科学院电子学研究所等,先后开展了半航空电磁研究与系统研发工作[8-9]。2013年,嵇艳鞠等人研制了无人飞艇长导线源半航空瞬变电磁勘探系统,并通过实验证明系统的有效性[10];同年,符磊等研制了一种基于磁通负反馈机制的低噪声、大面积空地接收线圈的电性源半航空瞬变电磁探测传感器,通过噪声测量验证了该方法的正确性,能够减少传感器的噪声,提高信噪比[11];2015年张雨默基于 STM32 研制了时域电磁标准源,并采用标准源对接收机进行标定和校正[12];2016年成都理工大学针对半航空瞬变电磁发射系统相关的理论方法和发射机设计的关键技术进行了研究,并完成了实验样机的功能验证[13];2016年,吉林大学研发了基于 Labview 的滑翔机半航空瞬变电磁接收系统[14];2017年,中国科学院研发了一种新的半航空瞬变电磁系统(S-ATEM),形成了一套稳定、高效、可实用的探测系统[15]。在数据预处理与噪声去除方面,研究人员分别利用小波去噪方法[16]、小波分解技术[17]、独立主成分分析[18]、平稳小波变换和逆平稳小波变换[19]、独立分量分析法和均值滤波基线漂移矫正算法以及卡尔曼滤波[20-21]、集成经验模态分解(EEMD)[22] 等方法,实现了较好的去噪、降噪效果。在应用方面,山东大学孙怀凤团队形成了针对半航空瞬变电磁的数据校正处理系统[23],取得了较好的处理结果,为后续数据处理及反演工作提供了一定的基础,并在广西多条复杂岩溶隧道的隐蔽灾害探查中成功应用[24-25]。
目前,国内仅有吉林大学、中科院地质与地球物理所、成都理工大学等少数几家科研单位开展了半航空瞬变电磁仪器研制工作,现有的成果多集中于理论研究和室内试验,仪器用于实际工程还存在诸多限制。随着传感器和数据接收系统的小型、智能化,以及民用低成本无人机性能与稳定性的提高,使无人机搭载半航空电磁系统进行探测成为可能。现阶段,半航空电磁探测技术已经成为国内外的研究热点和今后物探技术发展的重要补充。为解决半航空瞬变电磁探测技术的卡脖子难题,亟需研制专用的轻量化、高性能接收系统。
本文研制的半航空瞬变电磁接收系统包含接收机、感应式瞬变电磁接收线圈和GPS秒脉冲电流同步器。接收机采用双MCU分层架构进行设计;外部搭载SDRAM结合FATFS系统实现高采样率的信号采集和存储;接收线圈采用多层交错式差分绕制方式以提高信噪比,内置姿态和GPS传感器,实时记录线圈姿态和位置信息;采用GPS秒脉冲实现高精度实时收发系统同步,同时开发了专用的数据预处理软件。通过集成试验,针对测试过程中发现的无人机噪声屏蔽和压制等问题开展不同转速、不同系统吊挂长度、不同飞行高度、不同飞行速度的影响研究,并成功开展野外系统集成测试。
1 半航空瞬变电磁接收系统
图1
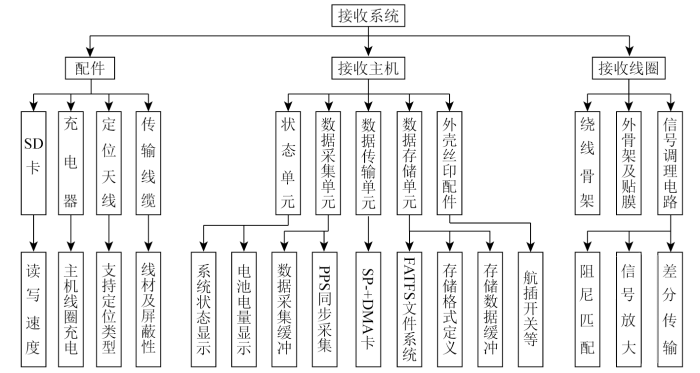
图2

接收机采用双MCU分层结构设计,内置放大器、AD转换模块、采集卡、数据传输单元以及嵌入式计算机,采集记录器采用全波形采集,可实现数据的高速采集、存储和上传。接收线圈采用多层交错差分设计方式,采用分段绕制并增加线圈间距的方式减小线圈本身的分布电容,提高传感器的谐振频率,同时在接收线圈放大电路上选用低噪声放大器件,减小电路噪声,在保持高灵敏度与高带宽的同时,可有效去除共模干扰,提高系统信噪比;嵌入姿态模块,与定位系统和高精度陀螺仪相融合,可以实时获取线圈姿态。整体接收系统采用GPS秒脉冲实现收发信号同步,与发射机相连,可实时记录发射电流,提供精准关断时间,能够兼容目前市面上已有的大功率瞬变电磁发射系统。该系统主要技术参数见表1。
表1 接收系统主要技术指标
Table 1
| 参数 | 指标 |
|---|---|
| 采样类别 | 连续采集 |
| 采样速度/位数 | 256 ksps/24bit |
| 同步方式 | 秒脉冲PPS |
| 接收线圈面积 | 56 m2 |
| 续航时间 | >8 h |
| SD卡存储容量 | 32 GB |
| 系统带宽 | ≥40 kHz |
| USB传输速度 | 平均1 MB/s |
| 姿态/GNSS采样率 | 5 Hz |
| 输入动态范围 | >60 dB |
2 系统集成与性能测试
2.1 飞行平台
图3

表2 KWT-X8L-25无人机主要技术指标
Table 2
| 项目 | 参数指标 |
|---|---|
| 最大翼展 | 3180 mm±20 mm |
| 空机质量 | 19 kg±0.5 kg |
| 空载起飞质量 | 35 kg±0.5 kg |
| 推荐最大起飞质量 | ≤60.5 kg |
| 任务载重 | ≤25 kg |
| 空载悬停时间 | ≥60 min(海拔1000 m以下,25 ℃) |
| 满载悬停时间 | ≥25 min(海拔1000 m以下,25 ℃) |
| 最大上升速度 | 4 m/s |
| 最大下降速度 | 2 m/s |
| 最大飞行速度 | 15 m/s |
| 相对爬升高度 | 4000 m(平原) |
| 工作海拔 | 5000 m(相对爬升2000 m) |
| 抗风能力 | 7级风 |
2.2 系统集成与性能测试
2.2.1 系统集成
半航空瞬变电磁接收系统研制及校准工作完成后,为确保接收系统空中采集性能正常,进行了系统集成与性能测试。为适应半航空瞬变电磁测量系统接收机、接收线圈等的安装,提升系统起降、抗风、平衡控制能力,对KWT-X8L-25无人机进行了机械吊挂结构改装。改装完成后,将自主研制的半航空瞬变电磁系统接收机、接收线圈通过安装支架、吊缆等集成于改装后的KWT-X8L-25无人机上,并使用传输线缆连接接收线圈和接收机(图4)。
图4
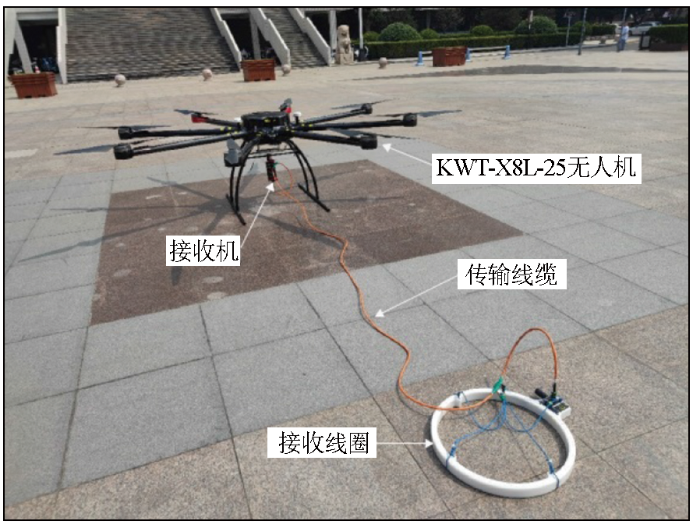
图4
半航空瞬变电磁接收系统集成于无人机平台
Fig.4
Semi-airborne TEM receiving system integrated with UAV
2.2.2 系统噪声测试
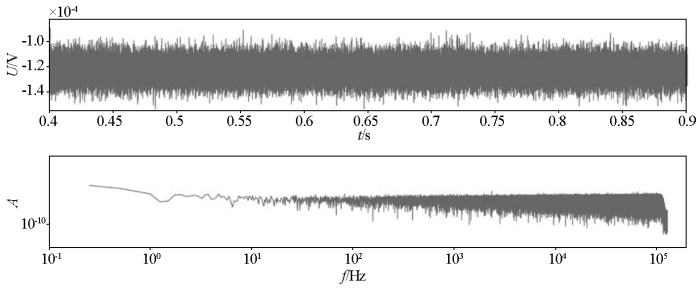
绝大多数情况下,器件或系统产生的噪声都是有害的,为确保该集成系统噪声处在较低的水平,不会对采集的数据和系统产生影响,针对该系统进行了本底噪声测试。将接收主机使用屏蔽线缆连接接收线圈,接收线圈输入两端连接到地,测试系统整体噪声情况。如图5所示(图中纵坐标U为电压,A为振幅),系统整体噪声水平约为400 μV(线圈放大倍数为330),折合到输入端系统内部噪声约为1.2 μV,无明显的干扰信号,系统整体噪声水平较低。
图5
2.2.3 野外采集测试
为测试系统的整体性能、电磁兼容性、工作状态、链路通信情况等,在山东大学某校区广场进行了野外数据采集,测试无人机桨叶转动时系统是否可正常采集以及信号特征。
首先,在无人机关机、接收机和接收线圈通电后测试环境背景噪声,此时低频段噪声主要为50 Hz工频噪声及其谐波,无其他异常干扰(图6)。无人机通电后,先在无发射源的情况下进行采集。如图7a所示,在桨叶转速为低转速时,信号的高频部分出现了明显频带较宽的噪声,且尖峰较大,主要集中在22 kHz、45 kHz、68 kHz、91 kHz和113 kHz附近。随后采集空中悬停状态下桨叶为中转速和高转速采集的信号,如图7b、图7c所示。对比分析不同转速下采集的信号特征,随着转速的加快,均在22 kHz、45 kHz、68 kHz、91 kHz以及113 kHz附近出现了高频噪声的尖峰,且噪声尖峰的幅值逐渐增加,证实了无人机桨叶旋转对采集信号有较大的干扰。
图6
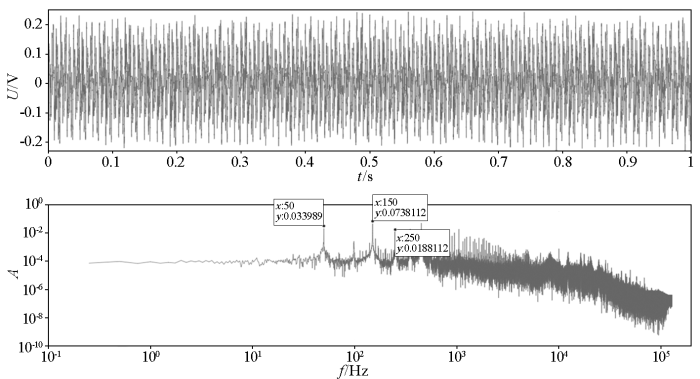
图6
背景噪声波形(上)及其频谱(下)
Fig.6
Raw data (top) and spectrum (bottom) of environmental background noise
图7
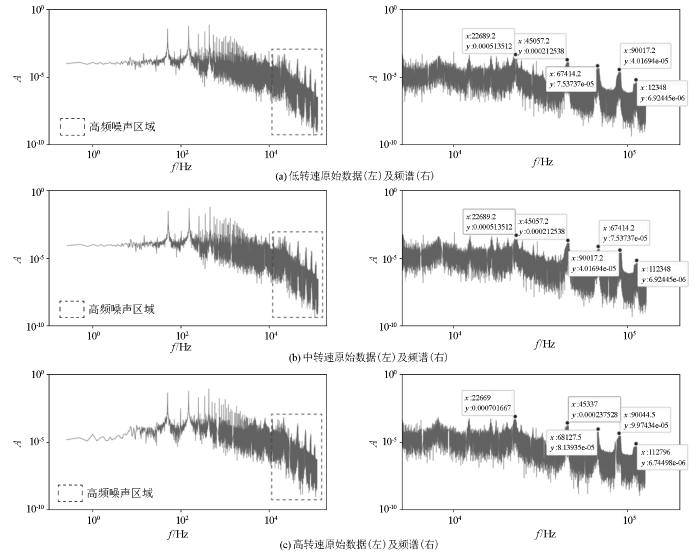
采集测试过程中,接收系统与无人机之间的吊挂长度均为4 m,在原始数据中观测到了强烈的高频噪声,导致数据中存在过多高频异常信号。通过对比发现,该高频噪声出现于无人机开机且桨叶转动的测试场景下,且随着转速的增加,高频噪声的幅值不断增强;但在无人机开机、桨叶未转动的测试场景下并未观测到高频噪声。因此,推断此高频噪声可能是由于无人机桨叶内的电机马达转动引起的高频电磁异常。
由于半航空瞬变电磁的接收系统吊挂于空中进行数据采集,相比于地面瞬变电磁观测系统,半航空瞬变电磁系统的探测精度较低,因此对接收系统的灵敏度有较高的要求。而此类高频信号的存在严重降低了采集信号的信噪比,信噪比过低的数据会影响数据成像精度和反演结果准确性,探测结果难以指导地质解释。因此,在野外采集过程中需要通过试验验证,分析无人机噪声对数据的影响,并采取针对性措施削弱无人机噪声对数据采集的影响,以提高数据信噪比,提升半航空瞬变电磁探测技术在复杂地形区域勘查的技术优势。
3 无人机噪声抑制试验验证
半航空瞬变电磁探测过程中采用无人机作为飞行平台进行数据采集,影响无人机噪声的主要因素有桨叶转速和吊挂绳长度。因此,考虑从系统结构优化角度提高数据信噪比,即采用合适的吊挂长度并加入铜箔屏蔽层,以减弱无人机高频噪声对接收线圈的电磁干扰。选用合适的吊挂长度,不仅能有效规避无人机桨叶旋转产生的高频噪声,而且能确保线圈采集过程的稳定性,不会产生较大的运动噪声。
3.1 不同吊挂长度测试
最优吊挂长度的确定需满足下列3个条件:①信号能否正常采集;②高频信号是否被有效压制;③接收系统采集时姿态是否稳定、是否有较大的晃动影响信号采集质量。
测区位于山东省济南市黄河北一处人文干扰较少的农田区,线缆长度分别设置为6 m、8 m、10 m、12 m,接收线圈离地高度为56.19 m。
首先进行地面静态参考噪声测试,在无任何发射源的情况下获取测区内的背景噪声。如图8所示,测区内整体噪声低频段主要集中在50 Hz频率及其谐波附近。以地面静态噪声采集信号为基准,对4种不同吊挂长度下的噪声水平、基线摆动、线圈稳定性情况进行了评估。
图8
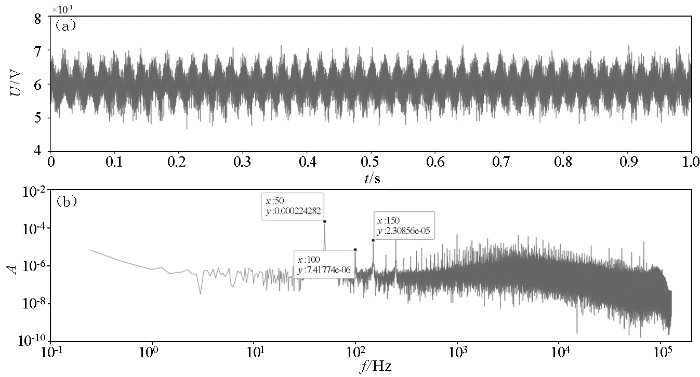
图8
地面静态参考噪声信号(a)及频谱(b)
Fig.8
Raw data (a) and its spectrum (b) of ground reference signal
图9为6 m、8 m、10 m、12 m吊挂长度下采集的原始信号的频谱特征,4种吊挂长度无人机高频信号幅值如表3所示,其中高频噪声主要分布在31 kHz、41 kHz、52 kHz、62 kHz、68 kHz以及72 kHz附近。吊挂长度为6 m时,大部分无人机高频噪声均能被有效压制,高频噪声的幅值降低,但22 kHz、45 kHz处的高频噪声依然存在且幅值较高;当吊挂长度增加至8 m时,相较于6m时,22 kHz处的信号幅值衰减了约31%,45 kHz的信号幅值衰减了约19%;吊挂长度增加至10 m时,仅能观察到22 kHz处的高频信号,信号幅值衰减了约76%;吊挂长度增加至12 m时,22 kHz处的高频信号幅值衰减了约86%。4种吊挂长度下均能有效采集电磁信号,随着吊挂长度的逐渐增加,高频信号也得到了有效压制,频谱特征更平滑,毛刺现象减少,说明增长吊挂长度且加入屏蔽层后可以有效压制无人机噪声,减少对接收线圈采集信号的干扰。当吊挂长度增加至12 m时,肉眼可观测到线圈摆动幅度较大,原始数据中线圈运动噪声明显,影响数据质量。
图9
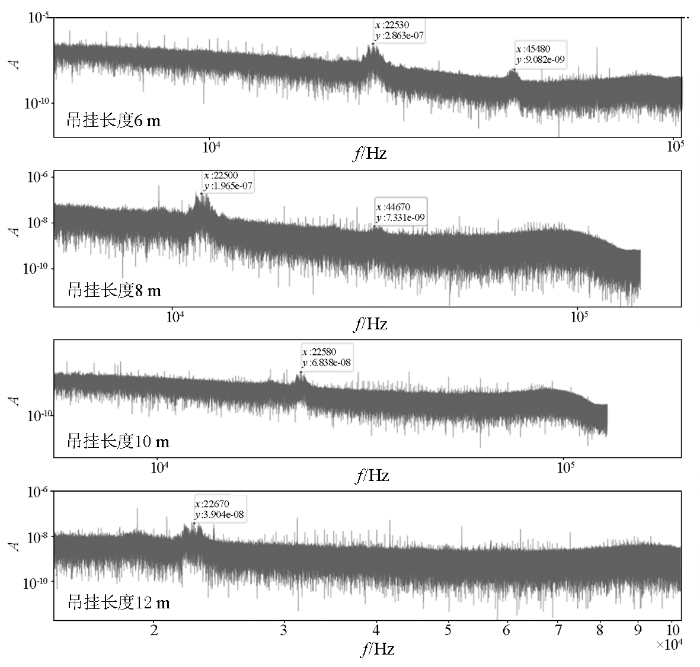
图9
不同吊挂长度信号频谱
Fig.9
Spectrum of received EM data with different hanging heights
表3 4种吊挂长度无人机高频信号幅值
Table 3
| 频点 | 吊挂长度 | |||
|---|---|---|---|---|
| 6 m | 8 m | 10 m | 12 m | |
| 22 kHz | 28.36 | 2.924 | 6.838 | 3.904 |
| 45 kHz | 9.082 | 7.331 | — | — |
综合分析不同吊挂长度的测试结果可知,增加吊挂长度能够有效压制无人机系统电机马达转动引起的高频噪声。但频率22 kHz附近的无人机噪声压制较为困难,后续可以通过上位机软件进行噪声滤除。为保证线圈平稳挂载和飞行,最终确定10 m为该套接收系统适配KWT-X8L-25无人机的最佳吊挂长度。
3.2 系统性能测试
采用10 m吊挂长度,在黄河北试验区进行了系统性能测试,试验区地理位置和航线设计见图10。测试发射源使用190 m×190 m的回线源,采用加拿大凤凰V8多功能电法仪的T-4瞬变电磁发射机发射,采用研制的接收机和接收线圈进行接收,分别进行了不同飞行高度、不同飞行速度的测试。
图10
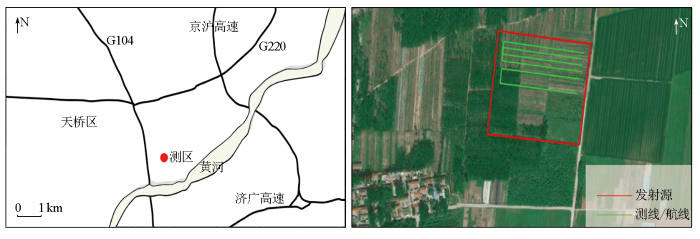
图10
试验区地理位置及航线设计
Fig.10
Geographical location of the studied area and survey design
3.2.1 不同飞行高度测试
野外实测采集时需选用合适的飞行高度,以保证接收系统可安全、稳定、无损地采集数据。本次测试分别设置了60 m、90 m、110 m三种不同的飞行高度,飞行速度均设为5 m/s,无人机与接收系统间吊挂长度10 m,发射电压为24 V,发射电流为4.9 A。如图11所示,3种飞行高度下均能稳定、无损地采集数据,且线圈姿态较稳定,基线摆动较小。飞行高度60 m时,采集到的信号峰值大致在±6 mV;飞行高度为90 m时,信号峰值大致在±4.7 mV;飞行高度110 m时,信号峰值降至±3 mV。由此可知,随着飞行高度的增加,线圈离地高度增加,采集到的信号逐渐减弱,晚期信噪比逐渐降低,数据过早进入噪声区。因此,在实际采集过程中,若地形条件允许,接收系统与地面间距不宜过大,建议无人机的飞行高度高于测区内最高海拔点60 m即可,此距离下既可以保证采集数据的质量,也可以保证采集作业的安全性。
图11
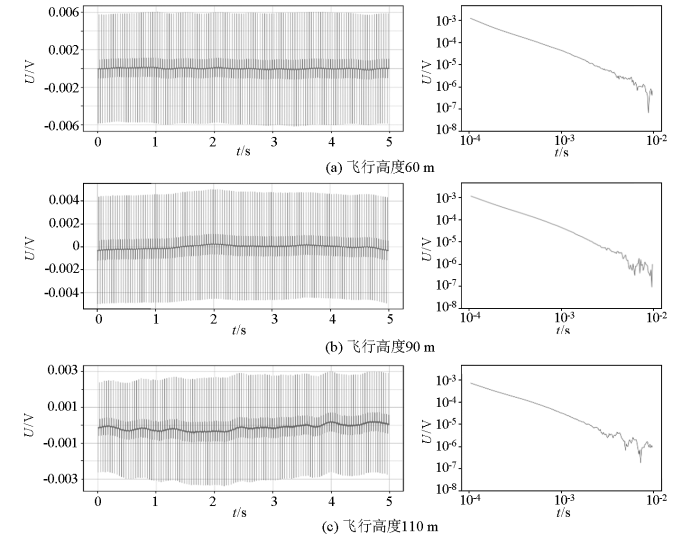
图11
不同飞行高度的原始数据(左)及叠加积分后的数据(右)
Fig.11
Received raw EM data (left) and stacked results (right) at different flight altitudes
3.2.2 不同飞行速度测试
由于接收线圈与无人机之间通过软绳相连,半航空瞬变电磁数据采集过程中风力、无人机偏转、无人机航速等因素都会导致线圈产生自旋或偏转,进而产生运动噪声,较小的运动噪声可通过多项式拟合等方法去除,若运动噪声过大则会导致采集的数据不可用。因此,在野外实测采集时还应确定最优的飞行速度以保证数据采集质量。
为测试不同飞行速度下的数据采集质量,分别进行了空中悬停和不同飞行速度的数据采集。飞行速度分别设置为5、7.5、10 m/s,发射电压为24 V,发射电流为5.5 A,飞行高度均为90 m,吊挂长度均为10 m,采集结果如图12和图13所示,3种飞行速度下采集的数据均完整有效。空中悬停采集时,原始数据基线平稳,没有明显的波动。随着飞行速度的增加,接收线圈的运动姿态呈现出不同幅度的摆动,图13b、c中原始数据中的基线呈现为波浪形态,飞行速度越大,基线摆动越严重,且叠加积分后的晚期数据信噪比降低。综上分析,飞行速度的增加会影响数据采集质量,过快的飞行速度会引起较大的运动噪声,降低数据质量。因此为保证飞行安全和数据质量,野外数据采集可选用5 m/s的飞行速度。
图12
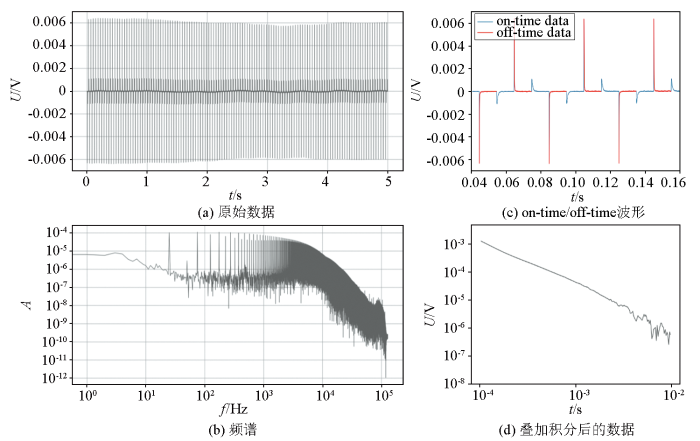
图13
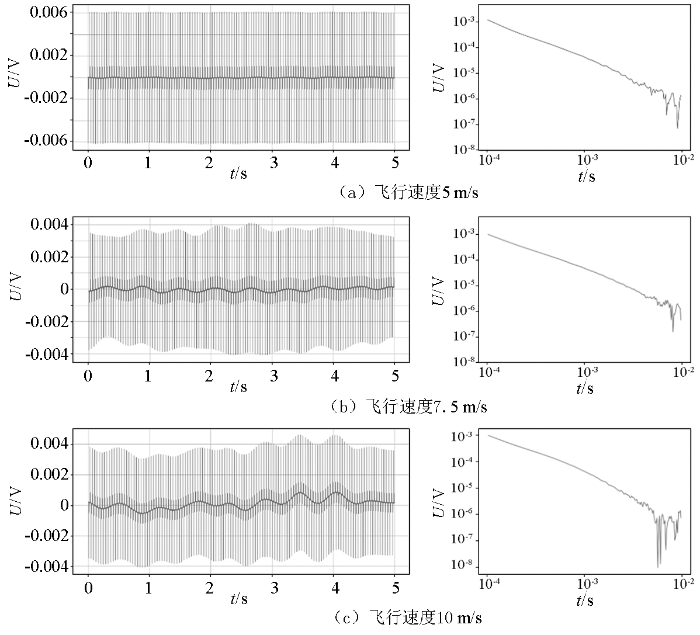
图13
不同飞行速度的原始数据(左)及叠加积分的数据(右)
Fig.13
Received raw EM data (left) and stacked results (right) at different flight speeds
综合分析不同飞行高度、不同飞行速度、悬停测试的数据采集结果,本文研制的半航空瞬变电磁接收系统搭载在KWT-X8L-25无人机平台进行野外探测时可稳定有效的采集数据。但是,数据采集质量易受飞行高度和飞行速度的影响,通过对比试验最终确定接收系统适配KWT-X8L-25无人机平台的最优飞行速度为5 m/s、最优飞行高度为60 m。
4 结论
本文基于KWT-X8L-25无人机平台搭载研制的半航空瞬变电磁接收系统,成功实现了数据高带宽、高灵敏度连续采集,高速存储和上传等功能。实际探测过程中,无人机桨叶高速旋转会引起较大的高频噪声干扰,降低采集数据质量。为确保无人机搭载接收系统作业时能够获得最佳探测效果,通过野外试验选取了最优吊挂长度和干扰屏蔽措施,确定了10 m为该系统搭载的最优吊挂长度,并确定了该接收系统适配KWT-X8L-25无人机的最优飞行速度为5 m/s、最优飞行高度为60 m。研制的半航空瞬变电磁接收系统能够有效应对高频噪声干扰,提高数据采集质量;试验提出的建议飞行参数和测试方法可为半航空瞬变电磁探测应用提供设计指导,为工程勘察和安全评估提供可靠支持。未来将依托高风险岩溶隧道、煤矿采空区等工程实例开展试验应用,评估该接收系统在工程应用中的有效性和准确性,并进一步优化系统性能。
参考文献
半航空电磁探测方法技术创新思考
[J].
DOI:10.6038/cjg2021P0409
[本文引用: 1]

最新的成矿理论研究和深部定位预测结果均表明我国大陆2000 m深部蕴藏着潜力巨大的矿产资源,为在辽阔的国土面积上实现大深度、高精度、广覆盖地球物理探测,开展半航空电磁探测方法与技术研究显得十分必要.本文总结了国内外半航空电磁法的发展现状,重点围绕方法与装备技术等问题进行讨论,并对近年来的最新成果,如:时频协同探测、半航空短偏移距探测、无人机编队观测等新模式,深度学习去噪、多发射源视电阻率定义、拟地震成像等进行了系统分析.最后,对半航空电磁法的发展方向进行了展望,指出任意码形大功率发射和三维高分辨成像等方法技术是下一步的关键突破方向,有望在深部地质找矿、灾害预警和城市地下深部勘查等方面发挥重要作用.
Technological innovation of semi-airborne electromagnetic detection method
[J].
地空瞬变电磁法研究进展
[J].
Research progress on ground-airborne transient electromagnetic method
[J].
New airborne electromagnetic method provides fast deep-target data turnaround
[J].
A comparison of data from airborne,semi-airborne,and ground electromagnetic systems
[J].
Development of grounded electrical source airborne transient EM (GREATEM)
[J].
Grounded electrical-source airborne transient electromagnetic (GREATEM) survey of Mount Bandai,north-eastern Japan
[J].
The development and applications of the semi-airborne electromagnetic system in China
[J].
无人飞艇长导线源时域地空电磁勘探系统及其应用
[J].
Development and application of the grounded long wire source airborne electromagnetic exploration system based on an unmanned airship
[J].
磁通负反馈空心线圈传感器特性和噪声研究
[J].
Research on characteristic and noise of magnetic flux negative feedback air coil sensor
[J].
基于STM32的时域电磁标准信号源研制
[J].
The development of transient electromagnetic standard signal source based on ARM
[J].
Development and application of a new semi-airborne transient electromagnetic system with UAV platform
[J].
电性源时域地空电磁数据小波去噪方法研究
[J].
Ground-Airborne electromagnetic signals de-noising using a combined wavelet transform algorithm
[J].
A wavelet-based baseline drift correction method for grounded electrical source airborne transient electromagnetic signals
[J].
基于核主成分分析的时间域航空电磁去噪方法
[J].
A denoising method based on kernel principal component analysis for airborne time-domain electromagnetic data
[J].
Electromagnetic noise reduction in grounded electrical-source airborne transient electromagnetic signal using a stationarywavelet-based denoising algorithm
[J].
Noise reduction of grounded electrical source airborne transient electromagnetic data using an exponential fitting-adaptive Kalman filter
[J].
A de-noising algorithm based on wavelet threshold-exponential adaptive window width-fitting for ground electrical source airborne transient electromagnetic signal
[J].
Applying transmission line theory to study the transmitting turn-off current in a long grounded wire
[J].
The first semi-airborne transient electromagnetic survey for tunnel investigation in very complex terrain areas
[J].
A joint application of semi-airborne and in-tunnel geophysical survey in complex limestone geology
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}