
0 引言
随着无人机技术的成熟,无人机航磁测量成为航空物探技术的一个新兴分支,具有部署便捷、应用成本低、智能化、高精度等特点,因此其研发与应用日益受到世界各航空地球物理公司和单位的广泛关注。如英国Magsurvey公司研发的PrionUAV航磁系统;荷兰Fugro公司在Insitu公司的协助下,改装了扫描鹰无人机Georanger-Ⅰ型高精度无人机航磁系统;加拿大万能翼地球物理公司利用Venturer型无人机,集成铯光泵磁力仪形成无人机航磁系统;德国MGT公司利用无人直升机MD4-1000型搭载小型化磁通门磁力仪,应用于UXO及滑坡探测;2012年日本发展了多款基于无人直升机平台的航磁系统,取得一定效果[1,2,3,4,5,6,7,8,9]。国内的中国自然资源航空物探遥感中心、中国地质科学院地球物理地球化学勘查研究所(简称“物化探所”)及中国科学院遥感与数字地球研究所等单位也先后开展了基于固定翼无人机航磁测量技术的研究工作,并取得了很好的效果,如物化探所在中国航天空气动力技术研究院,以及核工业航测遥感中心协助下,基于国产彩虹-3无人机平台集成的航空物探(磁/放)综合站,在我国东北、西北地区实际测量中取得高质量的数据[10,11];2008年中船重工715所进行了相关系统研制,劳雷工业公司近两年也在进行相关研究,但均未见应用于实际测量工作[12];桔灯勘探公司开展的基于多旋翼无人机搭载磁通门磁力仪系统,重量轻但精度较低。
从目前研究来看,固定翼无人机平台有低空高精度、飞速快、效率高等特点,适合大面积的航磁测量工作,但是需要机场跑道的保障;而无人直升机在超低空、低速巡航、机动灵活性更具优势,并且无需机场跑道的保障,适合于大比例尺、小面积的航磁详查测量工作,国内的研究也相对较少。2017年物化探所与山西省煤炭地质物探测绘院合作,集成了一套基于无人直升机的航磁系统,并在江苏省某滩涂区进行试验飞行,笔者就无人直升机性能、如何弱化飞机磁本底干扰、探头安装的最佳稳定位置、无人直升机的航磁补偿方式以及实际应用效果等方面进行详细探讨分析。
1 系统研发
无人直升机航磁系统主要包括无人直升机平台和航磁系统两部分,无人直升机空中飞行由地面控制站通过无线电传输和控制命令进行控制,智能自主飞行。
1.1 无人直升机平台
本系统采用的无人直升机平台为WH-110A型,是由北京方信科技在进口基础上自主研发的一款新型无人直升机,旋翼直径3.2 m,机身高1.01 mm,机身宽0.72 m,全长3.81 m,最大巡航速度60 km/h,续航时间3 h,有用载荷35 kg,最大起飞重量110 kg,最大飞行高度3 000 m,该飞行平台具有以下特点:
1) 控制系统采用差分GPS自适应飞控导航系统,具备目测遥控、超视距实时监控、高精度定位悬停和预设航线智能自主飞行功能,可以根据作业要求设置飞行航线和任务指令。
2) 起降稳定便捷,只需要8 m×8 m空地,风速小于8 m/s时可以满足无人直升机起降及平稳飞行,最大抗风能力可达15 m/s。
3) 飞控系统使用无线电传输和控制,飞行高度大于100 m时通讯距离大于30 km,无人直升机在飞行过程中的方位、姿态、速度、油量、飞行轨迹等数据可实时传至地面控制站,实现对无人直升机平台的远程监控。
4) 该平台有用载荷可达到35 kg,载重能力相对较大,小型航磁系统重量在5 kg左右,完全满足航磁系统载重要求。
1.2 机载航磁系统
机载航磁系统由CS-VL高精度铯光泵航磁仪、AARC51自适应航磁补偿和数据收录仪、气压高度计、雷达高度计、GPS导航定位系统等设备组成。该磁测系统采集磁场数据的自动补偿、磁场强度、经纬度坐标、离地高度、海拔高度、飞行方向等数据。
AARC51是RMS公司生产的运用在地球物理勘探及环境调查领域的先进航磁补偿系统,结构紧凑、轻便并且十分坚固耐用,磁场范围15 000~105 000 nT,分辨率0.32 pT,系统噪声小于0.1 pT,补偿精度(包络线)约20 pT,校准时间约6~8 min,海拔使用高度达6 000 m。CS-VL磁力仪测量范围15 000~100 000 nT,转向差小于±0.2 nT,工作温度-40℃~50℃,100%防水。整个系统总重量不超过5 kg,是无人直升机上理想的航磁系统。
1.3 系统集成
1.3.1 飞机磁基底
由于飞机大部分组件为金属材质,其本身就是一个磁性体(如图1),飞机发动机所在位置的磁场最强,可以达到240 nT,向机头和机尾方向磁场强度逐渐减弱,这种强磁场会对航磁测量造成很大的干扰,因此需要对无人机进行改装,尽量减小这种飞机自身带来的磁干扰。
图1
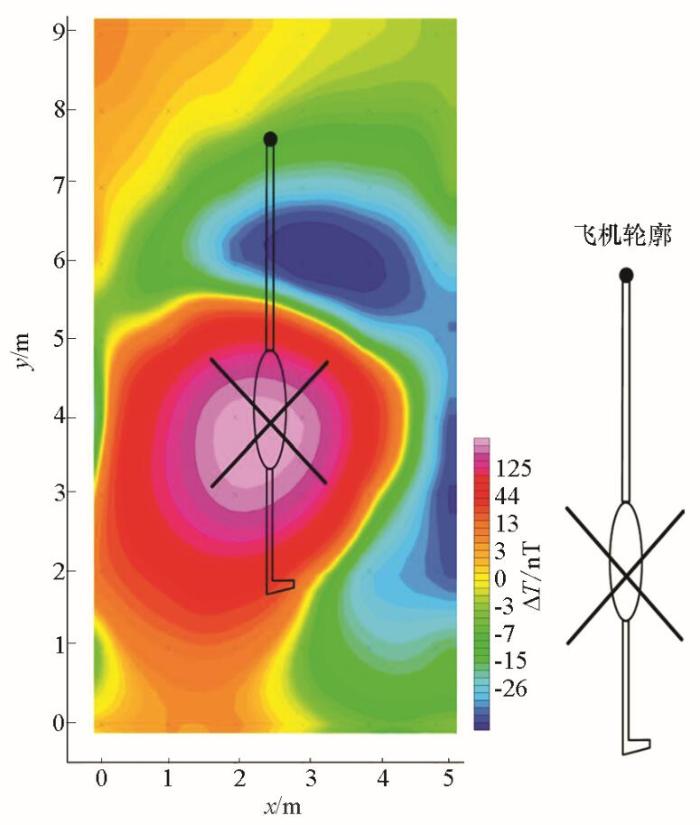
首先在无人直升机机起落架位置安装向机头方向延伸长度为3.5 m碳纤维材质的探杆,使得磁探头远离飞机机身,以减小其磁干扰;同时,除飞机关键部件外,将其余组件更换为无磁或弱磁材料,如油箱采用塑料材质、探头支撑杆均采用碳纤维材质、飞机底部仪器箱采用全铝材质、固定螺丝采用纯铜材质等(如图2)。
图2

1.3.2 系统集成
针对无人直升机的结构特点,航磁系统集成需要在机腹底部设计一个开细孔的铝制仪器箱,将航磁数据收录补偿仪和供电电源固定在仪器箱中,既可以达到防潮效果又不影响仪器散热;雷达高度计安装于仪器箱底部,略高于飞机起落架,避免起落架造成的散射干扰;将磁探头安装于由3根碳纤维杆组成的三角支撑结构的探杆顶端,三角结构的稳定性可以减小探杆的晃动对磁探头的影响,同时支点位置水平结构处安装磁通门磁力仪,可以与飞机姿态保持同步,为航磁补偿提供准确的三分量数据;GPS天线位于机身尾部,避开旋翼遮挡位置,并通过飞机尾椎内部线路与航磁收录仪连接(如图2)。
为了实现航空磁力仪和无人机平台的辅助信号同步采集,使用D/A模块将雷达高度和气压高度数据转换为模拟量,送入航磁收录仪,航磁测量系统组成结构如图3所示。
图3
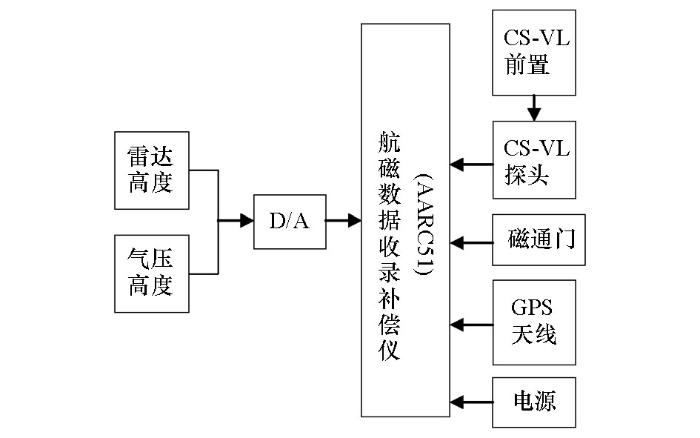
图3
航磁系统组成结构示意
Fig.3
The diagram of the structure of the unmanned helicopter aeromagnetic survey system
2 航磁补偿试验
2.1 常规航磁软补偿方法
2.2 无人直升机航磁系统磁补偿试验
由于小型无人直升机操控方式与有人驾驶飞机或中大型固定翼无人机的操控方式不同,自动驾驶模式下,飞行高度可以满足要求,但是测控系统无法完成要求的规范动作。在经过多次讨论分析和试验后,选择磁场平稳区,采用无人直升机空中悬停状态下,以飞机机头方向(探头所在方位)为基准,飞行高度在视距范围内(300~500 m),手动遥控控制飞机沿4个方向完成要求的动作,同一方向每个动作反复做3~5个,所有动作完成时间控制在6~8 min内(以所用仪器特性为准),从而达到航磁补偿的目的(如图4,x方向为机头方向)。
图4
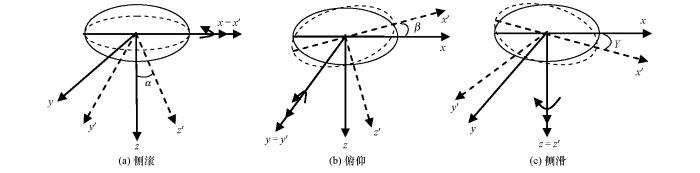
图4
无人直升机悬停补偿动作示意
Fig.4
The diagram of hovering maneuver for the unmanned helicopter aeromagnetic compensation
a— roll; b—pitch; c— yaw
图5
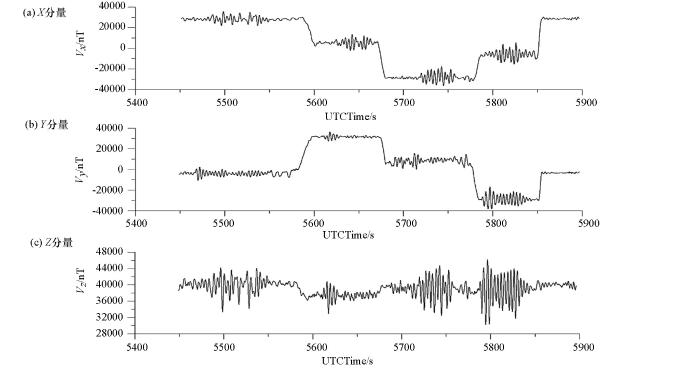
图5
磁通门磁力仪三分量剖面
Fig.5
The profile of three components of fluxgate magnetometer
a— X component; b— Y component; c— Z component
图6
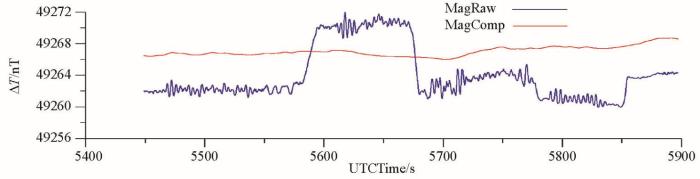
该次补偿试验,补偿前标准差(Unco)为0.397 66 nT,补偿后标准差(Comp)为0.046 9 nT,改善比(Impr)为8.479,满足规范补偿后标准差小于0.08 nT的要求(如图7)。
图7
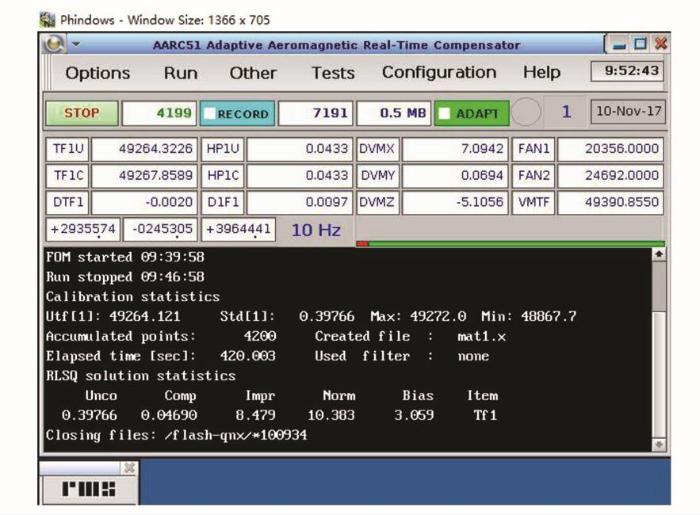
图7
无人直升机航磁系统磁补偿试验结果
Fig.7
Result of the unmanned helicopter aeromagnetic compensation test flight
3 应用实例
2017年应用本系统在江苏省某海域开展了飞行测量工作,测线方向为EW向,测量比例尺为1∶10万,起降坪选取测区内较宽阔的海岸大堤公路的一处空地。测区位于海岸带滩涂区,测区内第四纪地层结构为除东部为海域外,其余地区均为第四系和新近系厚覆盖层,从收集的钻孔资料可知第四系底界面埋深约为280~300 m,300 m以深最上部地层
为新近系盐城组灰绿色、棕黄色亚黏土夹粉细砂、中粗砂,该地层顶部为棕黄、灰黄色夹绿色亚黏土(硬土层),约10~15 m厚, 是长江三角洲地区第四纪与新近系地层分界标志层。在基岩方面,测区内新近系地层与中生界地层直接接触,基岩地层主要由白垩系浦口组(K2p)和上古生界(Pz2)地层组成,基岩深度在600~800 m之间。
该测量工作完成有效测量飞行近200测线千米,测网疏密度1 000±0.8 m,偏航距在10 m范围内的采样点占100%,最大偏航距5.09 m;实际测量平均飞行高度为119 m(设计飞行高度120 m),全部采样点保持在118~121 m范围内;本次测量各测线的动态噪声水平在0.010~0.015 nT范围内,平均动态噪声0.012 nT,根据规范中的分级标准,全部为一级动态噪声水平。本次航磁数据处理采用物化探所基于Geosoft二次开发的航磁处理软件,质量统计采用了中国自然资源航空物探遥感中心的GeoProbe软件,统计结果全部满足航磁规范要求。
本次获取的航空磁测成果与收集的以往(20世纪80年代)1∶20万有人机航磁成果进行对比(如图8),从图中可以看出主体异常所在位置、分布形态基本是一致的,验证了该系统的有效性。由于两次航磁工作的比例尺、采样率、航磁仪精度以及飞行高度等参数的不同,在对磁异常分布细节方面的表现存在一些差异,但很明显无人直升机航磁获取的磁场数据更精确更细致。
图8
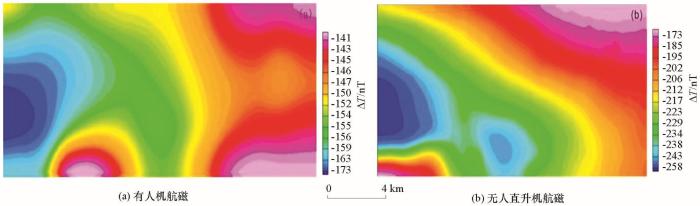
图8
江苏省某滩涂区航磁测量成果对比
Fig.8
Comparison of aeromagnetic anomalies of a shoalarea in Jiangsu province
a— manned aerial vehicle aeromagnetic survey; b— unmanned helicopter aeromagnetic survey
4 结论
该无人直升机航磁系统是将航空磁测设备安装到可靠的无人直升机平台,从而应用到航空物探测量,为地质调查、矿产勘探等提供了一种高效灵活的工作手段。
4.1 优势
1) 具有更精确的飞行控制。无人直升机配备的飞控导航系统能够按照事先规划好的航线全自主飞行测量,偏航及飞行高度保持能力等远远高于传统有人人工驾驶飞机。
2) 工作效率提高。该无人直升机巡航速度可达60 km/h,加载副油箱每架次续航可达到3 h,飞机的加油方式简便耗时短,仅需十几分钟就可完成加油工作,每天可进行多个架次的飞行任务,并且可在夜间飞行实现全天候测量,提高了工作效率。
3) 生产成本降低。该无人直升机只需要2名飞控人员即可开展工作,降低了人员成本,并且燃油使用普通汽油即可,百公里油耗在20 L以内,具有很高的燃油经济性。
4) 起降场地的选取更为灵活。无人直升机的起降相对于中大型固定翼无人机而言,不受机场跑道的制约,在较为平坦开阔的硬质空地即可完成,因此在实际航磁测量工作中,可在工区内或最近位置选择起降点,减少路途航程,提高效率。
4.2 展望
1) 无人直升机具有超低空、低速巡航的飞行特点,因此在大比例、高精度、小面积详查工作具有广阔的应用前景。
2) 该无人直升机航磁系统进一步的研究方向是实现地面人员实时监测并干预机载航空磁力仪的机制,研发一套航磁仪远程测控软件,提供人机交互界面,对空中实时测得的航磁数据进行监控。
参考文献
2000年来西方国家航空物探技术的若干进展
[J].
DOI:10.3969/j.issn.1000-8918.2007.01.001
URL
[本文引用: 1]

综述了2000年来西方国家航空物探技术的新进展,介绍了最新的航空磁力仪、航空伽马能谱仪、航空电磁仪、航空重力测量系统、无人机航空物探系统以及数据处理软件系统等。
Recent advances in aero geophysical techniques used abroad
[J].
“十五”以来我国航空物探进展与展望
[J].
DOI:10.3969/j.issn.1000-8918.2007.06.001
URL
Magsci
[本文引用: 1]
<p>对"十五"以来我国国土资源系统航空物探的工作概况、主要技术进展与应用成果进行了简要回顾,并对今后我国航空物探的发展趋势进行了分析与预测.</p>
The advances of aero geophysical survey in China since the tenth five yare plan and its development trend
[J].
Use of unmanned air vehicles in oil,gas and mineral exploration activities
Carleton university fixed wing uavproject
[D].
Georanger aeromagnetic UAV-from development to commercial survey
[J].DOI:10.1071/PVv2006n125p28 URL [本文引用: 1]
Design of a radiation surveillance unit for an unmanned aerial vehicle
[J].
DOI:10.1016/j.jenvrad.2004.10.009
URL
PMID:15748656
[本文引用: 1]
This paper describes a prototype of a compact environmental radiation surveillance instrument designed for a Ranger unmanned aerial vehicle. The instrument, which can be used for tracking a radioactive plume, mapping fallout and searching for point sources, consists of three different detector types (GM, NaI(Tl) and CZT) and an air sampling unit. In addition to the standard electronics for data acquisition, the system contains an onboard computer, a GPS receiver and environmental sensors, all enclosed in a single housing manufactured of fibreglass-reinforced composite material. The data collected during the flight is transmitted in real-time to the ground station via a TETRA radio network. The radiation surveillance unit is an independent module and as such can be used in, for example, aeroplanes, helicopters and cars.
Unmanned aircraft system for rapid near surface geophysical measurements
[J].
DOI:10.3997/2214-4609.20131212
URL
[本文引用: 1]
This paper looks at some of the unmanned aircraft systems (UAS) options and deals with a magnetometer sensor system which might be of interest in conducting rapid near surface geophysical measurements. Few of the traditional airborne geophysical sensors are now capable of being miniaturized to sizes and payload within mini UAS limits (e.g. airborne magnetics, gamma ray spectrometer). Here the deployment of a fluxgate magnetometer mounted on an UAS is presented demonstrating its capability of detecting metallic materials that are buried in the soil. The effectiveness in finding ferrous objects (e.g. UXO, landslides) is demonstrated in a case study.
A development of airborne survey of gravity and magnetics on an unmanned helicopter and its data processing
自主技术无人机航空物探(磁/放)综合站研发进展
[J].
DOI:10.3975/cagsb.2014.04.01
URL
[本文引用: 1]
无人机航空物探技术是航空物探技术的一个新兴分支。文章首先阐述了无人机航空物探技术的国内外研发情况,然后介绍了基于国产彩虹3无人机的国内首套应用于地球物理勘查的无人机航空物探(磁/放)综合站的研究进展。基于国产彩虹3无人机平台,开展了专用飞机改装、超低空地形跟随飞控、远距离遥控遥测等关键技术攻关,集成研发了自主知识产权的无人机航空物探(磁/放)综合站样机,成功开展了面积性应用试验,综合站样机功能、性能等达到了世界先进水平。无人机航空物探(磁/放)综合站研发取得关键进展。
The progress in the decelopment of the integrated UAV magnetic &radiation survey system
[J].
中国地质科学院2013年度十大科技进展揭晓
[J].
DOI:10.3975/cagsb.2014.01.01
URL
[本文引用: 1]
2013 annual report and exchange on scientific and technological achievements & Top Ten Scientific and Technological Progress Selection of Chinese Academy of Geological Sciences were held in Beijing, from 9 to 10 January, 2014. 21 recommended excellent scientific and technological achievements were reported and exchanged at the meeting. Various institutes affiliated to Chinese Academy of Geological Sciences, i.e., Institute of Geology, Institute of Mineral Resources, Institute of Geomechanics, Institute of Hydrogeology and Environmental Geology, Institute of Karst Geology and Institute of Geophysical and Geochemical Exploration, as well as the Academy Authority, made the preliminary selection for the total 1022 scientific and technological projects undertaken in 2013. The selection committee consists of 42 academicians and experts coming from Ministry of Land and Resources, Ministry of Education, Chinese Academy of Sciences, China Earthquake Administration, Sinopec Group, etc. Top Ten Scientific and Technological Progresses of Chinese Academy of Geological Sciences in the Year 2013 were selected and commented one by one on the basis of careful and rigorous review and voting. The awarded achievements involve basic geology, mineral resources, hydrogeology, engineering geology, environmental geology, techniques and methods, which represent the latest, highest research level of Chinese Academy of Geological Sciences.
Top ten scientific and technological progress of Chinese academy of geological sciences in the year 2013 nuveiled
[J].
无人机航空物探技术研发应用现状与展望
[J].
DOI:10.3969/j.issn.1001-1749.2016.06.05
URL
[本文引用: 1]
缺少飞行平台是目前我国进行复杂地形条件下物探数据获取的主要瓶颈之一,而无人机作为一种成本低、操作灵活、无人员伤亡危险的空中移动探测平台,正好满足高效率资源勘查的需要。近年来,国内、外航空物探飞行平台从传统的有人机向无人机发展已经取得了一定成果。这里分别介绍了国内、外无人机航空物探研发及应用现状,以及国内自主技术的无人机航空物探应用成果,分析了目前无人机航空物探存在的主要优势及不足,并对无人机航空物探的发展前景进行了分析与展望。
The R & D application of UAV airborne geophysical survey and its developmenttrend
[J].
航磁补偿技术研究
[D].
Study on aeromagnetic compensation technique
[D].
16项自动磁补偿系统
[J].
飞机磁补偿、磁补偿器的历史、现状及发展趋势
[J].
History, current situation and development trend of magnetic compensation and magnetic compensator for aircraft
[J].
飞机磁场的自动补偿方法
[J].正众所周知,在运动条件下实现高精度磁测所遇到的首要问题是飞机的磁性干扰,因而如何抵消飞机磁干扰对磁探仪的影响,一直是十分重要的问题.本文与目前国内广泛应用的人工稳态方法不同,系采用动态方法并借助于微计算机技术对恒定场、感应场、涡流场进行分离测定自动地进行校正处理.此种校正处理没有近似、没有模拟计算、没有补偿线圈,没有易受噪声影响的线性电路,即可实时处理,也可事后处理,省时,精度高.
Automatic compensation technique for the aeromagnetic field
[J].
飞机的磁干扰及电子补偿方法
[J].<p>本文系统、简要地叙述了八项磁补偿原理。在此基础上阐述了电子磁补偿原理。完整地提供了一套操作简易、补偿精度较高的三架次补偿方法,并给出一个补偿实例。</p>
Magnetic interference and electronic compensation method for aircraft
[J].
Performance measures in aeromagnetic compensation
[J].DOI:10.1190/1.3657070 URL [本文引用: 1]
AGS-863航磁全轴梯度勘查系统关键性指标测试
[J].<p>中国国土资源航空物探遥感中心成功研制出具有完全自主知识产权的AGS-863航磁全轴梯度勘查系统,并在内蒙古某地进行了航磁全轴梯度试生产。为配合航磁全轴梯度试生产,对系统设计的关键性指标予以实际测试,设计了相关试验,以验证AGS-863航磁全轴梯度勘查系统的稳定性与可靠性。测试结果表明系统具有非常好的同步特性、一致性和长期稳定性以及补偿精度。</p>
Key indicators testing for AGS-863 three axis airborne magnetic grandiometer
[J].
航磁软补偿质量评价方法及软件实现
[J].
DOI:10.11720/j.issn.1000-8918.2013.6.13
URL
Magsci
[本文引用: 1]
《航空磁测技术规范》(DZ/T 1402-2010)对航磁软补偿质量给出了具体的指标要求,但没有明确航磁软补偿质量的评价方法,笔者在借鉴航磁自动数字补偿仪DSC-1的评价方法基础上,提出利用补前磁总场和补后磁总场进行事后评价的方法,并编制了软件,为软补偿质量的统一评价提供了可能。
The method of quality assessment for digital magnetic compensation and software realization
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}