|
|
|
| Development of a submarine optically pumped magnetometer |
GONG Yi-Xuan1( ), JIANG Kai1, GAO Jing-Yu2, ZHU Wan-Hua2, CHEN Kai1() ), JIANG Kai1, GAO Jing-Yu2, ZHU Wan-Hua2, CHEN Kai1() |
1. School of Geophysics and Information Technology, China University of Geosciences (Beijing), Beijing 100083, China
2. Aerospace Information Research Institute, Chinese Academy of Sciences, Beijing 100094, China |
|
|
|
|
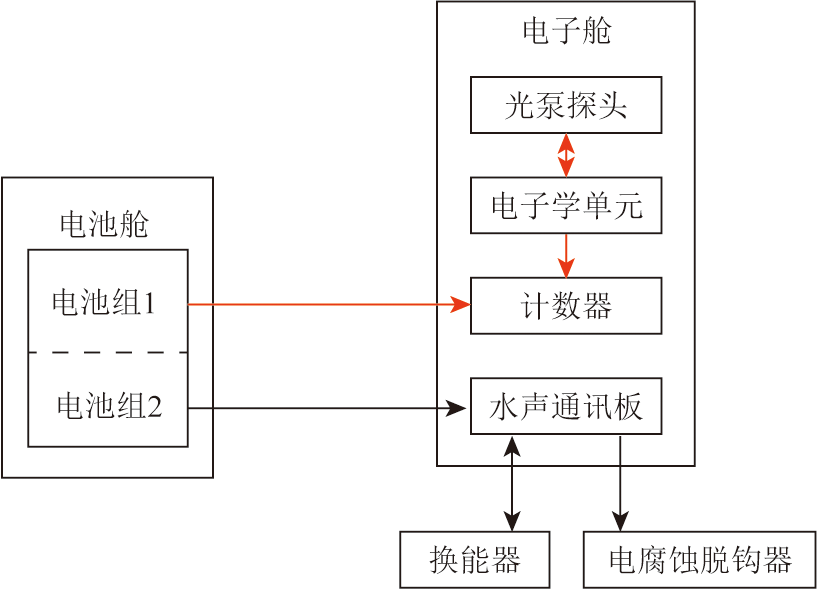
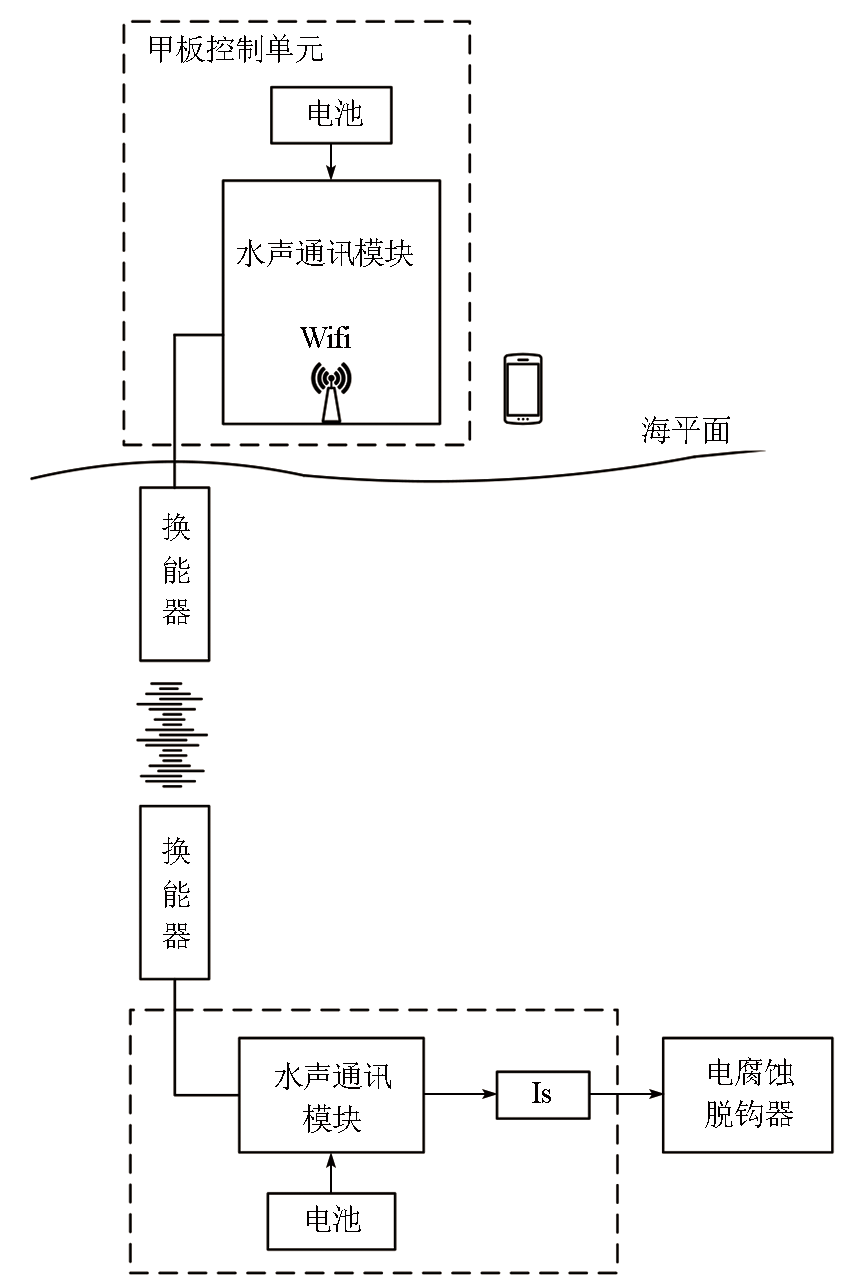
Abstract The Autonomous Underwater Vehicle (AUV) equipped with a magnetometer conducts underwater magnetic anomaly detection, enabling long-duration and large-scale continuous sampling. It offers advantages such as concealment, high efficiency, high practicality, wide application range, strong maneuverability, and robust endurance. To improve measurement accuracy, synchronous seabed magnetic field data is needed as a reference to counteract environmental magnetic noise. To address this, a submarine optically pumped magnetometer was developed to provide a reference for processing AUV magnetic anomaly detection data.The submarine optically pumped magnetometer consists of a magnetic field measurement unit and an acoustic release unit, capable of high-precision autonomous acquisition of the total magnetic field on the seabed, as well as underwater acoustic release and recovery. The magnetic field measurement unit includes an optical pumping probe, electronic unit, counter, battery pack, and nylon pressure chamber. The acoustic release unit includes an acoustic transducer, acoustic communication board, electro-corrosion decoupler, cement block, buoyancy block, and frame. This design addresses key technical challenges such as miniaturization, autonomous acquisition, and underwater acoustic communication.In 2022, a magnetic anomaly detection test was conducted in the offshore waters of Qingdao. The test results verified the autonomous seabed magnetic field acquisition and the release and recovery functions of the submarine optically pumped magnetometer, providing effective reference data for underwater target detection.
|
|
Received: 01 April 2024
Published: 08 January 2025
|
|
|
|
|
|
|
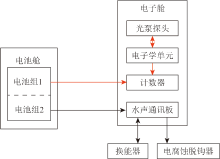
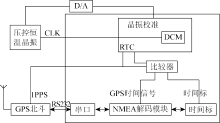
Hardware schematic of submarine optical pump magnetometer
|
|
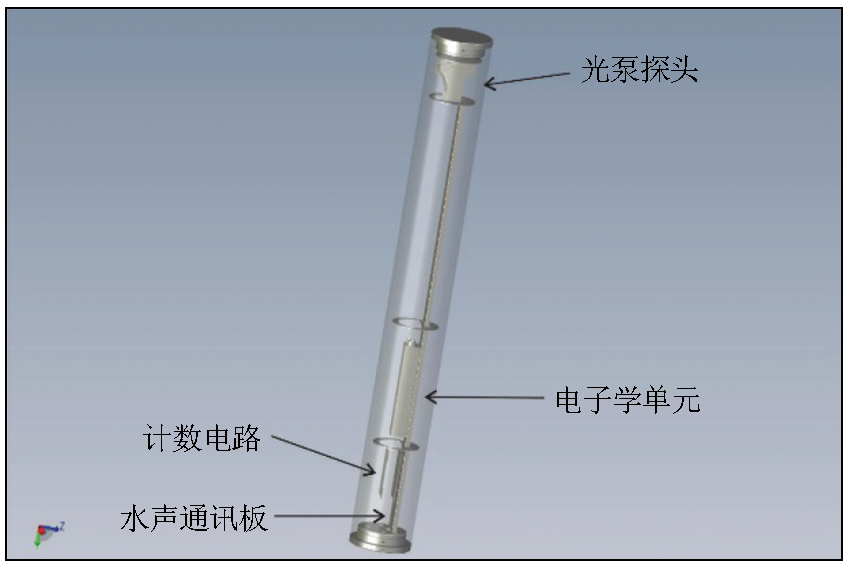
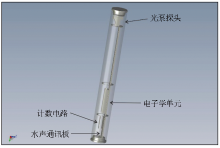
Schematic diagram of the structure inside the electronic chamber of the submarine optical pump magnetometer
|

|
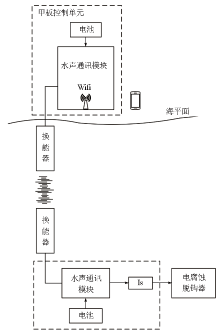
Deployment diagram of submarine optical pump magnetometer at sea
|

|
Block diagram of counting circuit
|
|
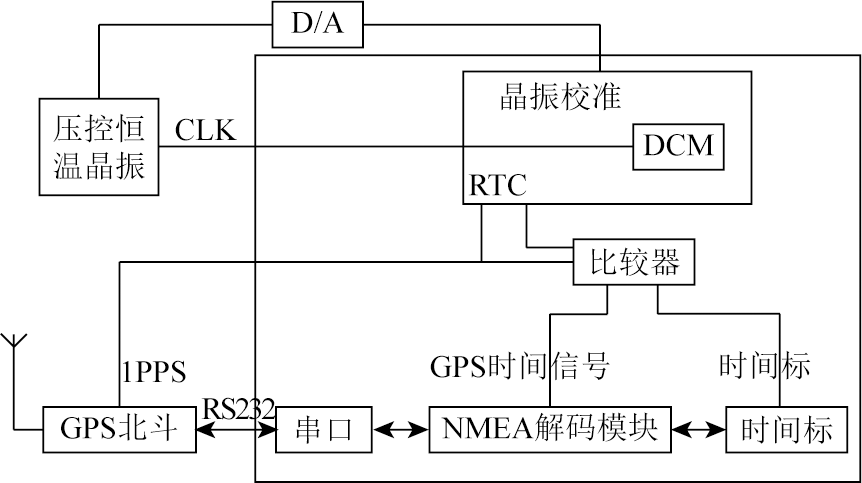
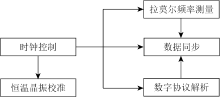
System clock source calibration schematic
|
|
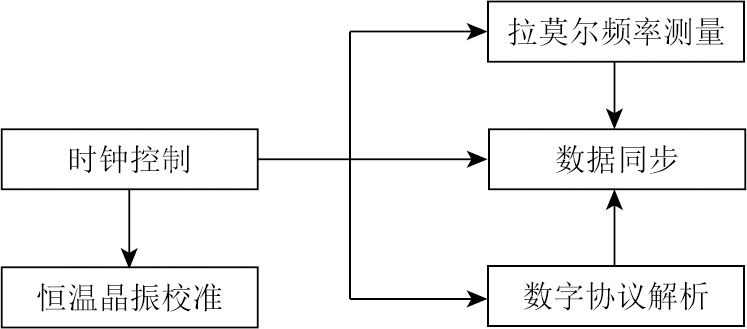
FPGA programming block diagram
|
|
Schematic diagram of hydroacoustic release operation
|
|
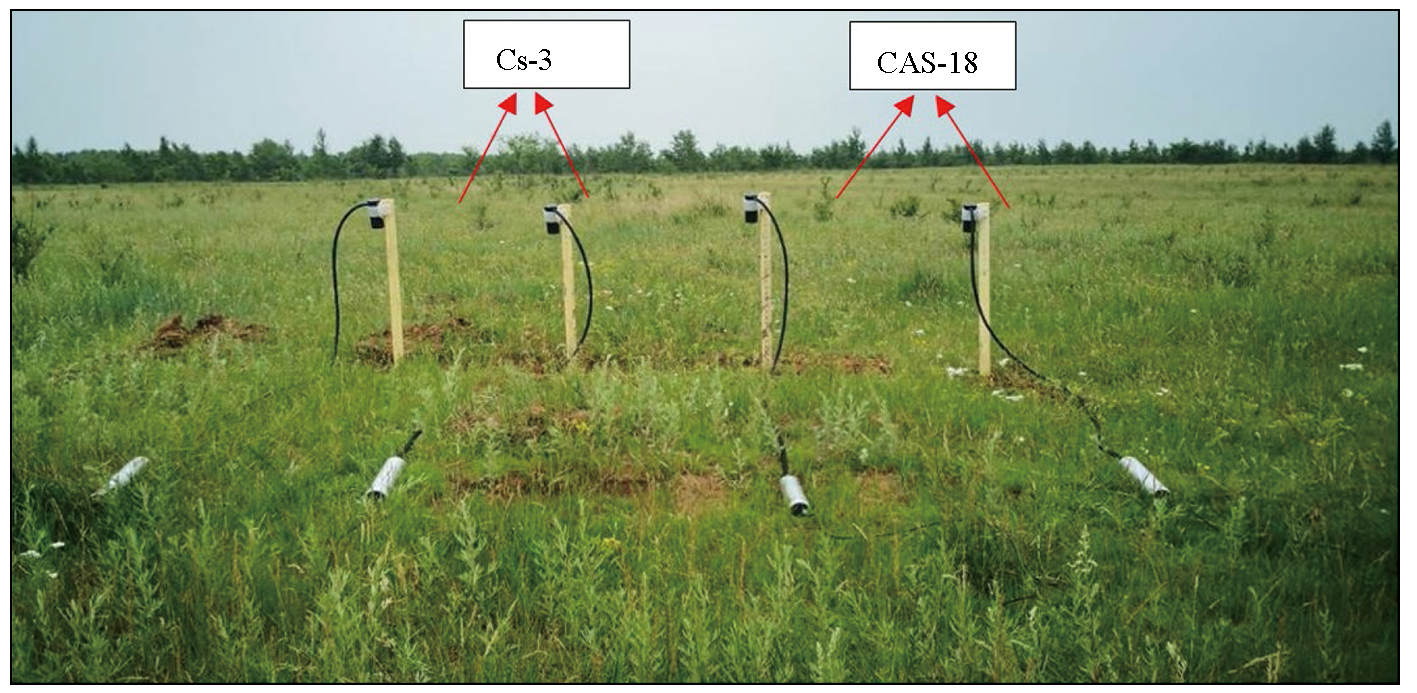
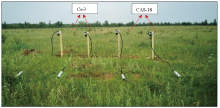
Optical pump magnetometer test site
|
|
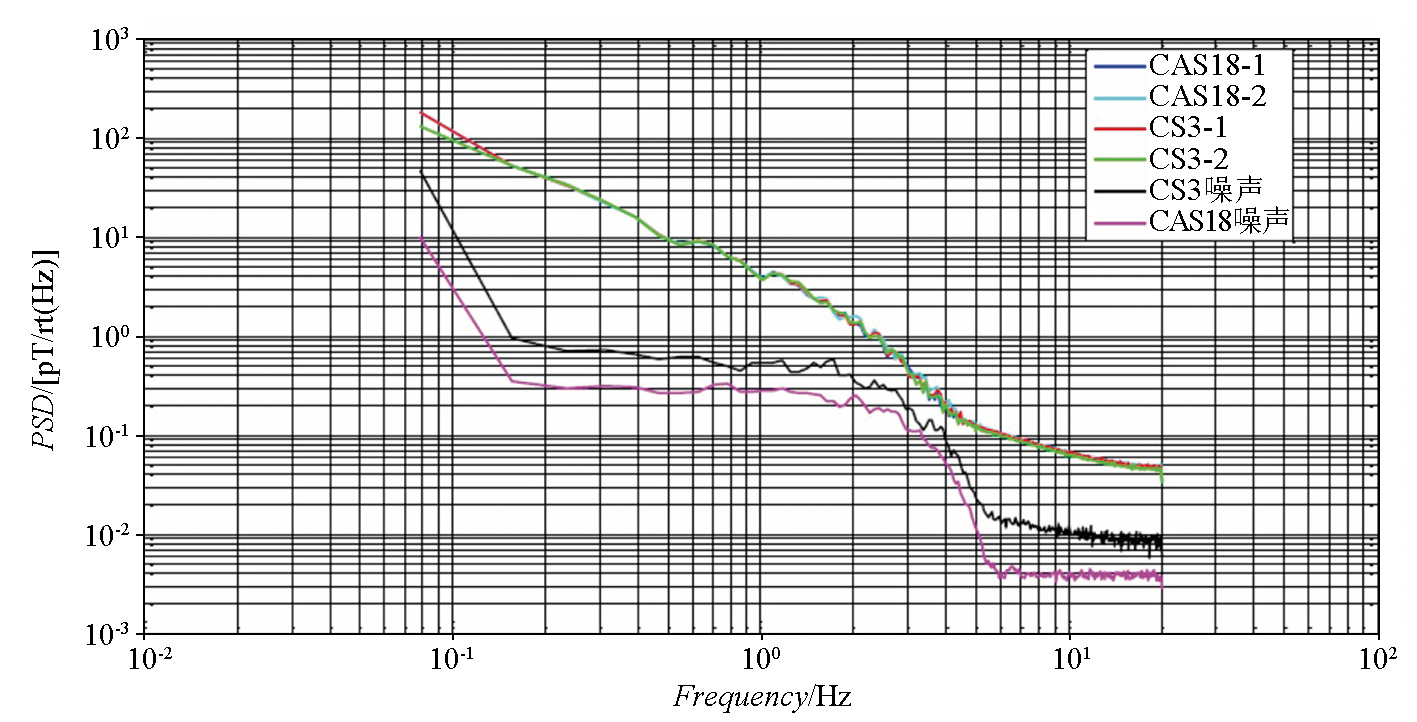
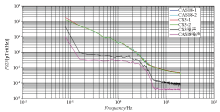
Results of background noise level comparison for different optical pump magnetometer
|
|
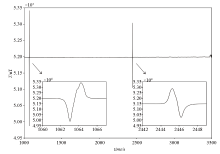
Land-based test results of the submarine optical pump magnetometer
|
|
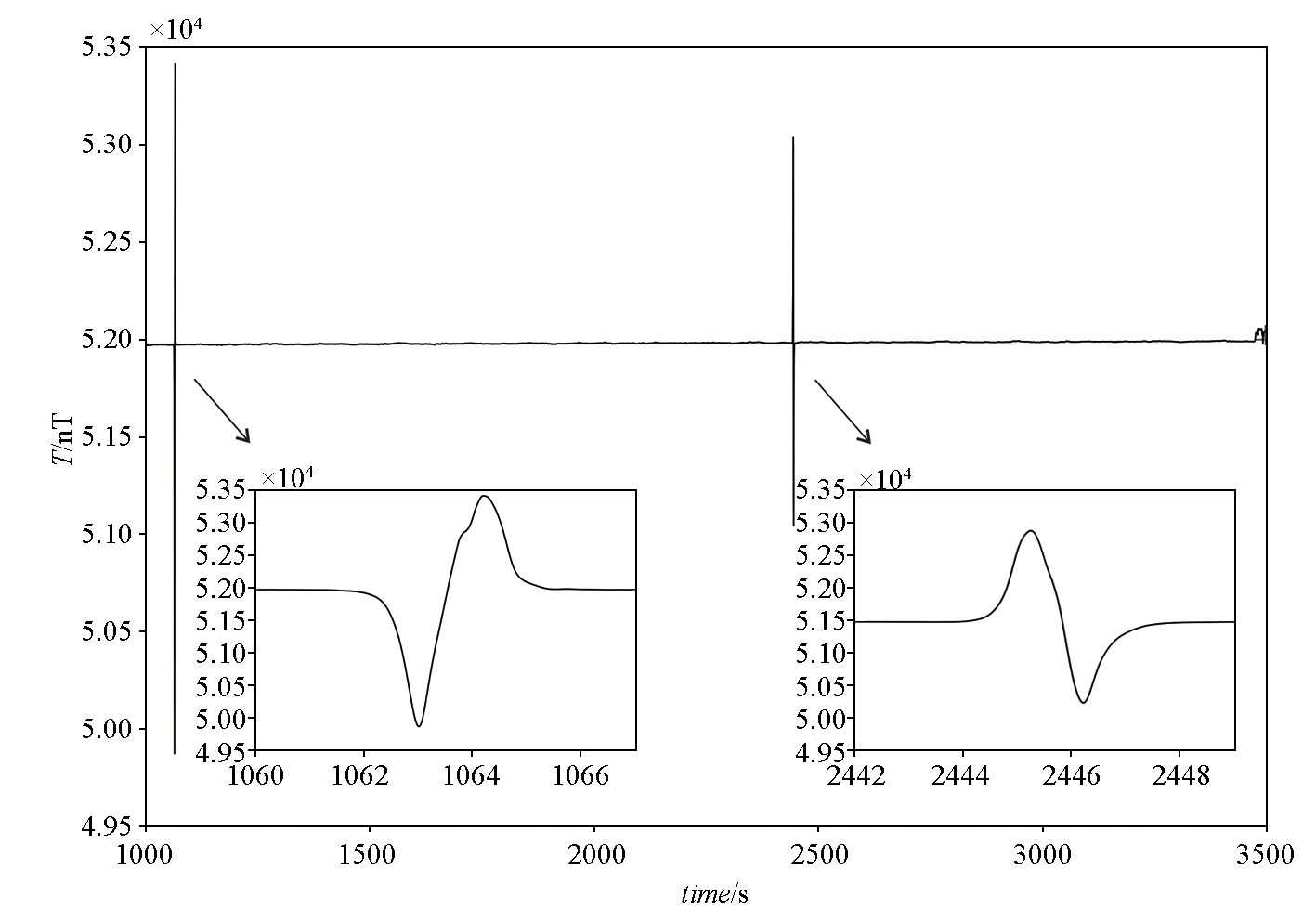
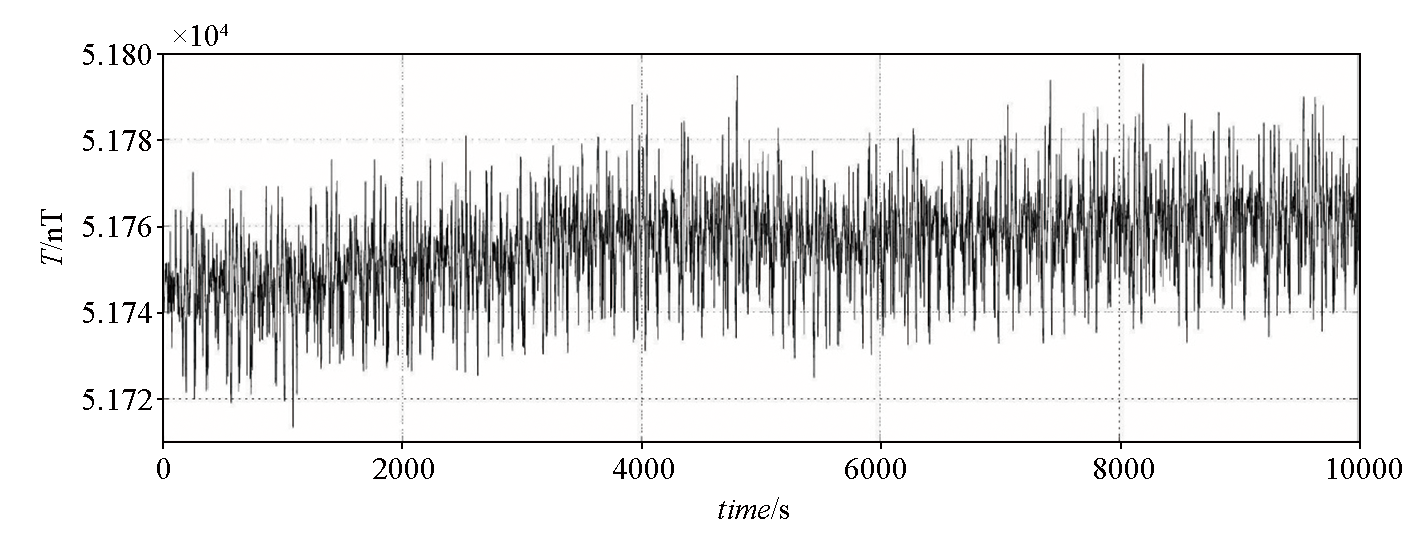
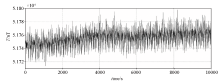
Partial time series of the total submarine geomagnetic field
|
|
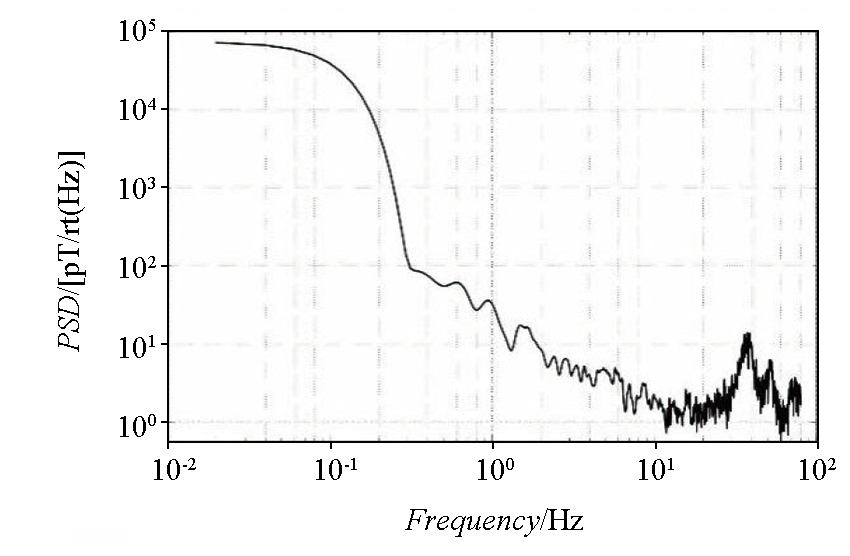
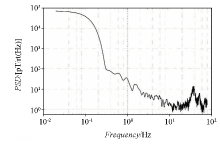
Power spectral density of the background field in the submarine geomagnetic environment
|
| [1] |
黄海宁, 李宇. 水声目标探测技术研究现状与展望[J]. 中国科学院院刊, 2019, 34(3):264-271.
|
| [1] |
Huang H N, Li Y. Underwater acoustic detection:Current status and future trends[J]. Bulletin of Chinese Academy of Sciences, 2019, 34(3):264-271.
|
| [2] |
陈允锋, 刘伟. 非声探潜新技术浅析[J]. 光纤与电缆及其应用技术, 2016(6):29-32,36.
|
| [2] |
Chen Y F, Liu W. Brief analysis of new non-acoustic submarine detecting technologies[J]. Optical Fiber & Electric Cable and Their Applications, 2016(6):29-32,36.
|
| [3] |
Fagnard J F, Vanderheyden B, Pardo E, et al. Magnetic shielding of various geometries of bulk semi-closed superconducting cylinders subjected to axial and transverse fields[J]. Superconductor Science and Technology, 2019, 32(7):074007.
|
| [4] |
王芙蓉. 水下金属目标探测方法研究[D]. 太原: 中北大学, 2024.
|
| [4] |
Wang F R. Research on(detection method of) underwater metal target[D]. Taiyuan: North University of China, 2024.
|
| [5] |
Sharp K M, White R H. More tools in the toolbox:The naval oceanographic office's Remote Environmental Monitoring UnitS (REMUS) 6000 AUV[C]// Oceans,IEEE, 2008.
|
| [6] |
Adams A A, Charles P T, Veitch S P, et al. REMUS100 AUV with an integrated microfluidic system for explosives detection[J]. Analytical and Bioanalytical Chemistry, 2013, 405(15):5171-5178.
|
| [7] |
Bondaryk J E. Bluefin autonomous underwater vehicles:Programs,systems,and acoustic issues[J]. The Journal of the Acoustical Society of America, 2004, 115(5s):2615.
|
| [8] |
Marthiniussen R, Vestgard K, Klepaker R A, et al. HUGIN-AUV concept and operational experiences to date[C]//[C]// Oceans'04 MTTS/IEEE Techno-Ocean'04, 2004.
|
| [9] |
McPhail S, Furlong M, Huvenne V, et al. Autosub6000:Its first deepwater trials and science mission[J]. Underwater Technology, 2009, 28(3):91-98.
|
| [10] |
Ura T, Obara T, Nagahashi K, et al. Introduction to an AUV"r2D4" and its kuroshima knoll survey mission[C]// Oceans'04 MTS/IEEE Techno-Ocean'04, 2004.
|
| [11] |
Fisher A W, Nidzieko N J, Scully M E, et al. Turbulent mixing in a far-field plume during the transition to upwelling conditions:Microstructure observations from an AUV[J]. Geophysical Research Letters, 2018, 45(18):9765-9773.
|
| [12] |
周晶, 司玉林, 林渊, 等. 海底AUV关键技术综述[J]. 海洋学报, 2023, 45(10):1-12.
|
| [12] |
Zhou J, Si Y L, Lin Y, et al. A review of subsea AUV technology[J]. Haiyang Xuebao, 2023, 45(10):1-12.
|
| [13] |
李浩. 航空激光氦光泵磁传感器光机系统设计及抗振动性能研究[D]. 长春: 中国科学院大学, 2022.
|
| [13] |
Li H. Research on opto-mechanical system design and anti-vibration performance of aviation laser pumped 4He magnetic sensor[D]. Changchun: University of Chinese Academy of Sciences, 2022.
|
| [14] |
陈大勇, 史彦超, 崔敬忠, 等. 矢量原子磁力仪中旋转磁场产生装置的研制[J]. 光学精密工程, 2022, 30(7):780-792.
|
| [14] |
Chen D Y, Shi Y C, Cui J Z, et al. Development of rotating magnetic field device for vector atomic magnetometers[J]. Optics and Precision Engineering, 2022, 30(7):780-792.
|
| [15] |
吴德伟, 苗强, 何思璇, 等. 量子传感的导航应用研究现状与展望[J]. 空军工程大学学报:自然科学版, 2021, 22(6):67-76.
|
| [15] |
Wu D W, Miao Q, He S X, et al. A study of existing status and prospects for quantum sensor in navigation[J]. Journal of Air Force Engineering University:Natural Science Edition, 2021, 22(6):67-76.
|
| [16] |
GSM-19-Overhauser.pdf [2024-05-29]. https://www.gemsys.ca/pdf/GSM-19-Overhauser.pdf.

|
| [17] |
CS-3-Brochure-762711_3.pdf[Z/OL]. [2024-05-31]. https://6c3ae8.a2cdn1.secureserver.net/wp-content/uploads/2017/03/CS-3-Brochure-762711_3.pdf.
|
| [18] |
裴彦良, 梁瑞才, 刘晨光, 等. 海洋磁力仪的原理与技术指标对比分析[J]. 海洋科学, 2005, 29(12):4-8.
|
| [18] |
Pei Y L, Liang R C, Liu C G, et al. Principle of marine magnetometer and specification comparative analysis[J]. Marine Sciences, 2005, 29(12):4-8.
|
| [19] |
张振宇, 程德福, 王君. 氦光泵磁测技术研究[D]. 长春: 吉林大学, 2012.
|
| [19] |
Zhang Z Y, Cheng D F, Wang J. Research on optically pumped helium magnetic measurement technology[D]. Changchun: Jilin University, 2012.
|
| [20] |
李庆萌, 张军海, 曾宪金, 等. 地磁场对铯原子磁力仪共振谱线的影响[J]. 哈尔滨工程大学学报, 2013, 34(12):1617-1620.
|
| [20] |
Li Q M, Zhang J H, Zeng X J, et al. Effect of the geomagnetic field on the resonance spectral lines of the Cs magnetometer[J]. Journal of Harbin Engineering University, 2013, 34(12):1617-1620.
|
| [21] |
周志坚, 程德福, 王君, 等. 氦光泵磁力仪中磁敏传感器的研制[J]. 传感技术学报, 2009, 22(9):1284-1288.
|
| [21] |
Zhou Z J, Cheng D F, Wang J, et al. Development of magneto-dependent sensor in the optical pumped magnetometer[J]. Chinese Journal of Sensors and Actuators, 2009, 22(9):1284-1288.
|
| [22] |
Alexandrov E B. Recent progress in optically pumped magnetometers[J]. Physica Scripta, 2003, T105(1):27-30.
|
| [23] |
王维东, 李国祝, 梁尚清, 等. 基于原子磁力仪的高精度电流传感器[J]. 仪表技术与传感器, 2021(1):1-3,8.
|
| [23] |
Wang W D, Li G Z, Liang S Q, et al. High accuracy current sensor based on atomic magnetometer[J]. Instrument Technique and Sensor, 2021(1):1-3,8.
|
| [24] |
彭湛, 邓明, 赵建刚. 电磁触发式声学释放器水下机的软硬件研发[D]. 北京: 中国地质大学(北京), 2020.
|
| [24] |
Peng Z, Deng M, Zhao J G. The Hardware and software realization of electromagnetic triggered acoustic releaser's underwater unit[D]. Beijing: China University of Geosciences Beijing, 2020.
|
| [25] |
罗贤虎, 邓明, 邱宁, 等. MicrOBEM:小型海底电磁接收机[J]. 物探与化探, 2022, 46(3):544-549.
|
| [25] |
Luo X H, Deng M, Qiu N, et al. MicrOBEM:A micro-ocean-bottom electromagnetic receiver[J]. Geophysical and Geochemical Exploration, 2022, 46(3):544-549.
|
|
|
|