0 引言
海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段。海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] 。
地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F 。传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] 。目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息。研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] 。国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] 。总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距。
鉴于以上现状,本文作者团队在地磁矢量测量理论、误差校正和磁干扰补偿方法研究的基础上,研制了海上拖曳式地磁矢量测量系统,并成功开展了海上测量试验。本文对所研制拖曳式地磁矢量测量系统的组成、海试情况、数据处理结果进行了介绍与总结。
1 系统研制
1.1 测量原理
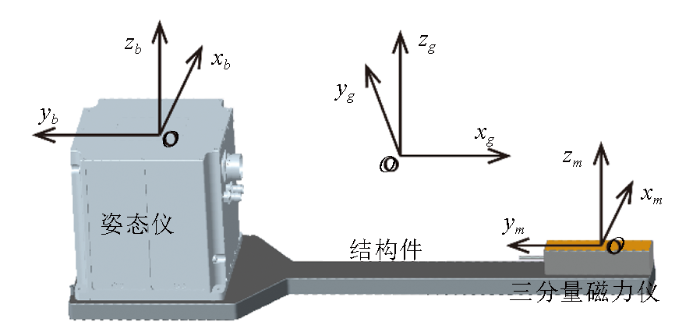
地磁矢量测量系统中主要包括三分量磁力仪和姿态仪,通常利用刚性无磁结构件将二者捷联安装,以实现二者之间高精度姿态传递,如图1 所示。在地磁矢量场测量过程中,三分量磁力仪采集其本体坐标系O x m y m z m O x b y b z b O x g y g z g O x m y m z m O x b y b z b [15 ] ,过程如式(1):
(1) B g = R b g B m
式中:B m = [ B m x , B m y , B m z ] T B g = [ B g x , B g y , B g z ] T R b g = c o s h s i n h 0 - s i n h c o s h 0 0 0 1 · 1 0 0 0 c o s p - s i n p 0 s i n p c o s p · c o s r 0 s i n r 0 1 0 - s i n r 0 c o s r r 、p 、h 分别表示姿态仪输出的横滚角、俯仰角和航向角。上述过程即实现了动态条件下的地磁矢量场测量。
图1
图1
地磁矢量测量系统坐标系示意
Fig.1
Coordinate system diagram of geomagnetic vector measurement system
1.2 系统集成
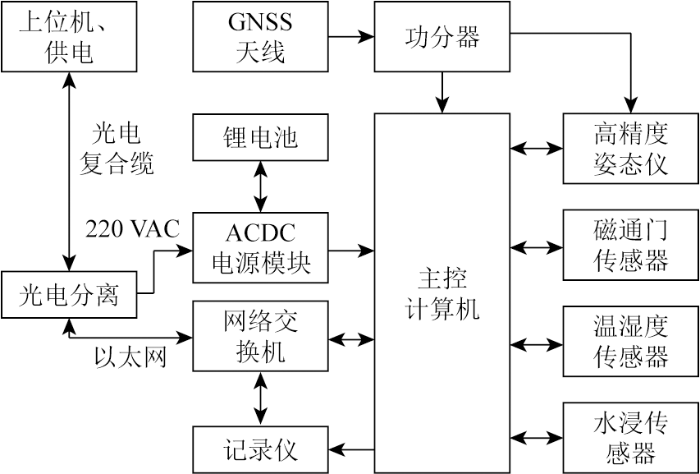
所研制的地磁矢量测量系统(以下简称“测量系统”)主要由电气部分、结构件及水密外壳、上位机3部分组成。测量系统的电气部分主要包括三分量磁力仪、高精度姿态仪、主控计算机、数据记录仪、网络交换机、UPS电源、GNSS天线、监控传感器、光电复合缆等,系统电气连接示意见图2 。
图2
图2
测量系统电气连接示意
Fig.2
Schematic diagram of electrical connection of the measurement system
三分量磁力仪采用的是国产HSF113型低噪声三轴磁通门传感器,标称频域噪声≤6 pT/rms√Hz@1Hz,量程为±100 μT,数据采样率200 Hz。由于三轴磁通门传感器存在转向差,在系统集成前对其进行了转向差校正,校正后总场标准差优于3 nT。高精度姿态仪采用的是国产POS7100型光纤捷联惯性导航系统,其标称姿态精度优于0.015°、航向精度优于0.05°,采样率为200 Hz。经实验室和跑车测试,在动态组合导航条件下,该光纤捷联惯性导航系统的姿态精度达到0.009 7°、航向精度达到0.004 5°。三分量磁力仪与姿态仪通过7075铝合金结构件捷联安装,结构件上设计有安装基准面,可使三分量磁力仪和姿态仪坐标系安装对准;磁力仪与姿态仪间隔1.2 m,避免了由姿态仪产生的干扰磁场对磁力仪产生的影响。
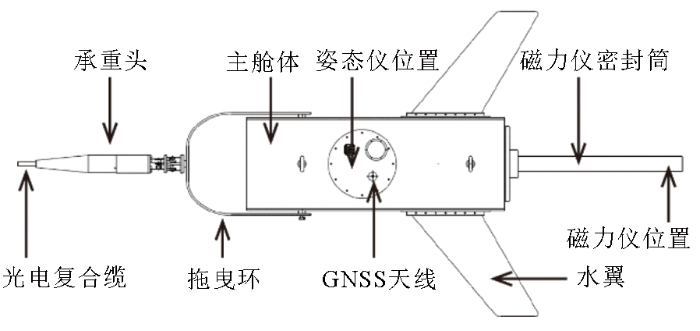
测量系统水密外壳采用6061铝合金设计加工,分为主舱体和磁力密封筒;主舱体为近长方体构型,其前端面为弧形设计,以减小水阻力,舱体两侧安装有碳纤维水翼,可提高测量系统在水中的姿态稳定性;磁力仪密封筒位于主舱体尾端且与主舱体相通,内部为磁力仪安装结构件的伸长部分,系统外轮廓示意见图3 。测量系统在水中呈正浮力,在海上测量中可保证其顶端露出水面。
图3
图3
测量系统外形示意
Fig.3
Schematic diagram of the measurement system
在测量系统工作过程中,主控计算机实时采集三分量磁力仪、姿态仪及辅助传感器数据,基于1 pps和MCU为数据准确授时,授时精度优于1 ms,三分量磁力仪和姿态仪数据同步精度优于5 ms;测量数据经打包后分为2路:一路进入数据记录仪存储,另一路经网络交换机和光电复合缆送至上位机,上位机可以对测量数据进行实时显示和存储。
2 海上试验
为检验所研制测量系统的性能,在完成实验室静态测试和水池试验的基础上,开展了海上测量试验。
海上测量试验于2021年9月3~4日在青岛市崂山湾海域某海上试验场完成。在构造区划上,测区属于华北地块东南部的鲁东隆起,邻近陆域及海域,发育多条NE向断裂构造,包括东北部陆上发育的牟平—即墨断裂带、东南部海域发育的千里岩断裂。测区邻近陆域部分地层主要为元古宇变质岩、中生界白垩系碎屑岩和新生界第四系松散堆积物。测区内海底地形平缓,水深8~10 m,底质以砂、粉砂和黏土质粉砂为主。根据前期的磁测资料,测区西北部范围内磁场变化较为平稳,东南部范围内有近NE向展布的磁异常条带,磁场峰峰值约200 nT,在此区域内进行试验可以检验测量系统对异常场的分辨能力。
测区远离主航道且区内无水产养殖设备,通航条件较好。在实际测量试验过程中,海况等级小于2级、海浪高度小于0.5 m。海上测量试验所用测量艇长度9 m、宽2.5 m,艇体为玻璃钢材质,整体磁性较弱。
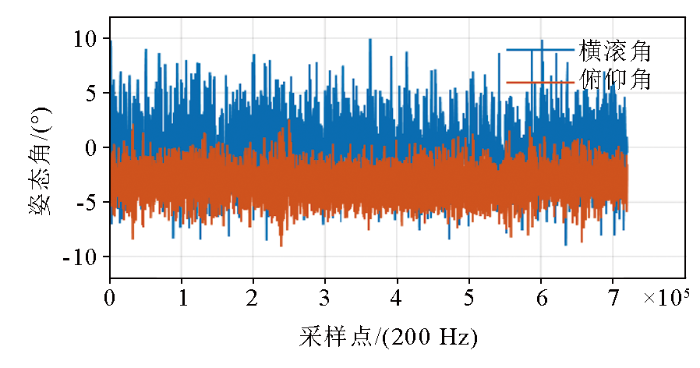
在海上测量试验中,利用测量艇拖曳该测量系统在水面上进行航行测量,测量艇航速5 kn(1 kn=1海里/小时),拖曳缆长度设置为30 m,满足拖曳距离大于3倍船长要求。在测量中,测量系统顶部露出水面,保证了GNSS天线可持续接收到卫星信号。图4 为测量系统在向测区航渡的过程,图5 为测量过程中某时段测量系统姿态数据曲线,经计算横滚角标准差为2.59°、均值为-0.13°,俯仰角标准差为1.40°、均值为-3.16°,测量系统前端略向下倾,总体上测量系统姿态较为稳定,满足设计要求。
图4
图4
海上测量试验过程
Fig.4
Process of sea measurement test
图5
图5
测量过程姿态角曲线
Fig.5
Attitude angle curve during measurement
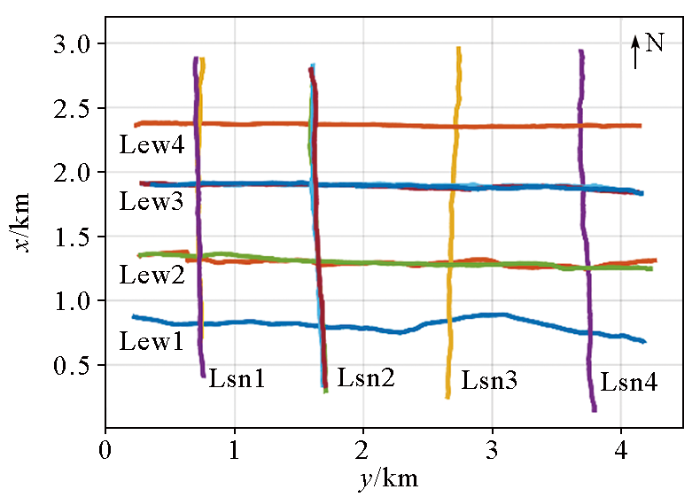
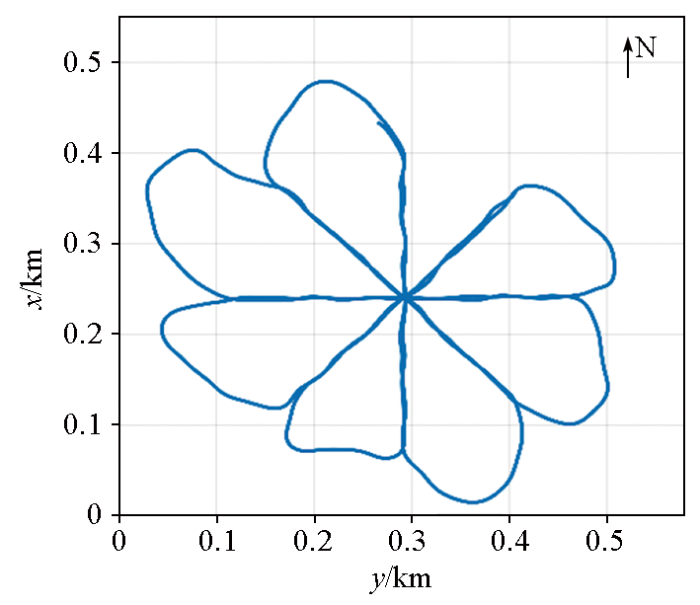
海上测量试验完成了4×4网格线测量,主测线(东西测线)有效长度4 km,检查线(南北测线)有效长度2.5 km,图6 为测线轨迹,其位置信息是由测量系统上,姿态仪与GNSS组合导航输出的经纬度投影到平面坐标的结果,图中位置进行了偏移处理;图中Lew1~Lew4表示主测线,Lsn1~Lsn4表示检查线。对上述部分测线进行了2~3遍重复测量,共计完成主测线8条、检查线7条。为消除测量系统本身干扰磁场对测量精度的影响,基于磁测资料,在测区邻近海域选择一处0.5 km×0.5 km的区域,该区域内背景磁场变化平稳且磁总场峰峰值小于20 nT。在该区域进行了八方位磁补偿航行,获取了补偿数据,用于计算磁补偿参数,补偿航行路径如图7 所示。
图6
图6
测线相对位置
Fig.6
Relative position diagram of survey line
图7
图7
磁补偿航行路径
Fig.7
Magnetic compensation sailing path
3 海试数据预处理及精度评价
3.1 数据预处理
在海试中,获取了三分量磁力仪输出的地磁矢量数据、姿态仪和GNSS组合导航输出的姿态、航向、位置、速度数据以及其他辅助传感器输出的数据,海试数据处理主要包括磁干扰补偿、磁矢量坐标系旋转、地磁日变校正、正常场改正、滤波及测线系统调差等。
测量系统上的结构件及水密外壳为铝合金材质,其本身具有一定硬磁,在地磁场磁化下会产生感应磁场,在动态条件下还会产生涡流磁场,另外测量系统上的各类电子器件同样会产生干扰磁场。虽然三分量磁力仪距离主舱体有一定距离,在一定程度上减弱了干扰磁场的影响,但其影响并未完全消除。为了提高测量精度,需要对测量系统本身的干扰磁场进行补偿。
经分析与测试,涡流磁场和电子器件磁场的强度较弱且影响范围有限,因此,在磁干扰补偿时,仅考虑测量系统的恒定磁场和感应磁场。当考虑硬磁和感应磁场时,在三分量磁力仪坐标系下,其测量模型可表示为:
(2) B m = ( I + M ) B e + B h
式中:B m B e B h I 为单位矩阵;M 为感应磁场系数的3×3矩阵 。
(3) B e = G ( B m - B h )
式中:G = ( I + M ) - 1 G 和硬磁向量Bh 后,便可根据式(3)对海上实测数据进行磁干扰补偿。
在海上测量过程中,进行了八方位磁补偿航行获取了补偿数据,利用该数据计算获得了系数矩阵G 和硬磁向量Bh ,分别为:
G = 0.993806 - 0.008230 0.004055 0.006833 0.993825 0.004083 - 0.013901 - 0.002346 1.003669
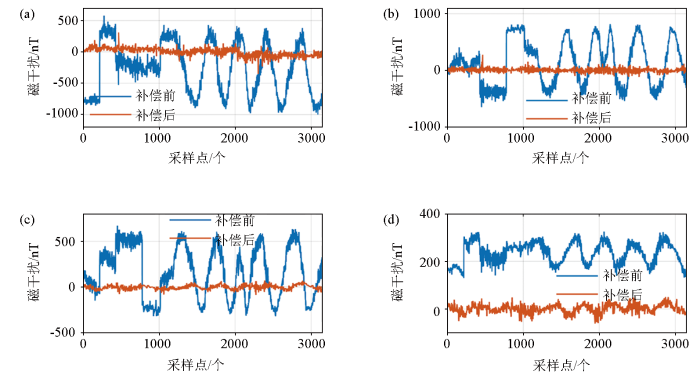
具体求取过程此处不详细展开。根据式(3)和求取的补偿参数对所有实测数据进行磁干扰补偿。图8 为补偿前、补偿后的磁场曲线对比,图中数据已旋转至地理坐标系下且抽稀至5 Hz,其中磁总场由3个分量计算得到。从图中可看出,在磁干扰补偿前,随着测量系统的移动及转向,磁场分量及总场出现了明显的波动,在补偿后数据曲线明显更加平稳。计算补偿前后标准差如表1 所示,并且基于参考文献[16 ]计算补偿改善率,与文献中不同点在于此处没有去除背景场的影响。由于补偿区域内受背景磁场变化的影响,补偿后的磁分量及总场数据曲线仍然存在一定的波动,导致补偿后的标准差仍然较大。
图8
图8
磁补偿前后磁场曲线对比
a—东向分量;b—北向分量;c—垂向分量;d—磁总场
Fig.8
Comparison of magnetic field curves before and after magnetic compensation
a—eastward component; b—northbound component; c—vertical component; d—total magnetic field
磁矢量坐标系的旋转,是将磁力仪坐标系下的地磁矢量旋转至地理坐标系下。完成磁干扰补偿后的地磁矢量数据仍然位于三分量磁力仪坐标系下,根据式(1)及姿态仪输出的姿态角和航向角,对地磁矢量进行坐标系旋转,获得地理坐标系下的地磁矢量信息。
地磁日变是影响海上地磁测量精度的重要因素。海试中架设了质子标量磁力仪进行日变观测,其观测数据不能对矢量数据进行校正,故选用国际地磁台站中与测区纬度相近的韩国青阳地磁台的磁矢量日变数据,对本次实测数据进行日变校正,青阳地磁台经纬度为126.85°E、36.37°N,与测区纬度偏差小于0.2°。另外,对磁分量和总场进行了正常场改正。
受姿态仪测量精度、三轴磁通门传感器本身性能、误差校正及磁干扰补偿不彻底等因素的影响,经上述处理后的数据中仍然包含一定的测量噪声和测线系统差。因此,对测量数据进行了滤波处理,消除了部分高频噪声的影响。并对所有测网数据进行了整体平差,消除了测线系统差。
3.2 精度评价
在海空磁力测量中,一般是通过计算重复线和交叉点内符合精度的方法,对测量成果进行评价[17 ⇓ -19 ] 。本次海上测量中进行了网格测线测量,并且在一些测线上进行了重复测量,形成了有效的交叉点和重复线,下面对重复线和交叉点的内符合精度进行评价。
3.2.1 重复线内符合精度评价
进行多次往返重复线测量时,重复线内符合精度计算方法为[17 ] :
(4) σ = ± ∑ j = 1 m ∑ i = 1 n δ i j ( m - 1 ) × n ( j = 1,2 , … , m ; i = 1,2 , … , n )
式中:σ m n δ i j j F i j F i
(5) δ i j = F i j - F i , ( j = 1,2 , … , m ; i = 1,2 , … , n )
(6) F i = ∑ j = 1 m F i j m , ( i = 1,2 , … , n )
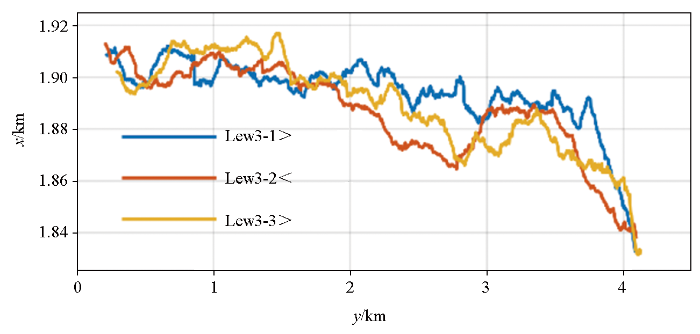
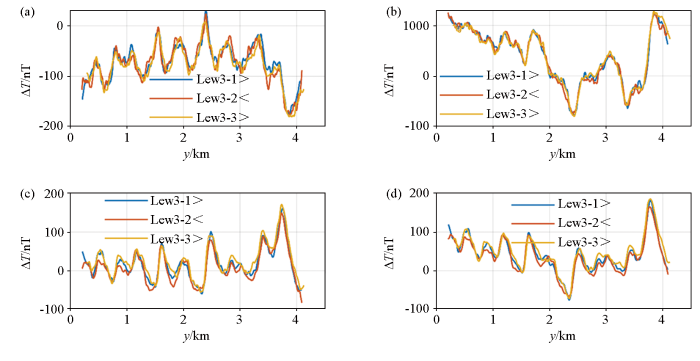
选取测线Lew3进行计算分析,在该条测线上进行了3次重复测量,重复测线分别命名为Lew3-1>、Lew3-2<、Lew3-3>,其中“>”表示由西向东航行、“<”表示由东向西航行。图9 为该重复测线的测量轨迹,由于受到海流、测量艇手动驾驶等因素的影响,3条重复线轨迹存在一定偏差,x 方向最大距离偏差35 m。
图9
图9
重复线轨迹
Fig.9
Trace of repeating line
图10 为Lew3测线上各重复线的磁场分量及总场曲线,从图中可看出,各重复线间磁场曲线整体变化趋势一致,说明其测量的磁场分量及总场是可信的。磁场曲线在局部存在一些偏差,推测可能是由磁干扰补偿及日变校正不彻底、测量轨迹偏差等因素导致。计算重复线内符合精度如表2 所示,各磁场分量及总场的重复线内符合精度均优于6.7 nT。
图10
图10
重复线磁场曲线
a—东向分量;b—北向分量;c—垂向分量;d—磁总场
Fig.10
Repeated line magnetic field curve
a—eastward component; b—northbound component; c—vertical component; d—total magnetic field
3.2.2 交叉点内符合精度评价
(7) ε = ± ∑ i = 1 m d i 2 2 m , ( i = 1,2 , … , m )
式中:ε m d i
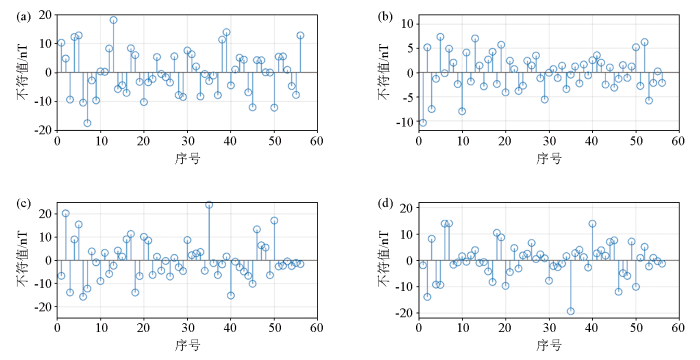
在海上测量试验中,完成主测线8条、检查线7条,共计形成交叉点56个,计算获得了各磁场分量及总场在各交叉点上的不符值,如图11 所示,从图中可看出,交叉点不符值基本呈正态分布。根据式(7)计算获得各磁场分量及总场的交叉点内符合精度如表3 所示,结果均优于6 nT。
图11
图11
交叉点不符值
a—东向分量;b—北向分量;c—垂向分量;d—磁总场
Fig.11
Crosspoint inconsistency
a—eastward component; b—northbound component; c—vertical component; d—total magnetic field
4 结论
通过海上测量试验表明,所研制的拖曳式地磁矢量测量系统,已初步具备海上地磁矢量场测量能力,可通过小型测量艇或大型测量船拖曳执行近海或深远海的地磁矢量场测量任务,使海洋地磁场测量信息更加丰富。所研制的拖曳式地磁矢量测量系统全部器件均为国产设备,技术状态自主可控。
在本次海试数据处理中,磁日变校正采用的是韩国青阳地磁台的矢量日变数据,其台站与测区直线距离近600 km,超出了规范要求最大500 km的规定,在一定程度上可能影响了最终的测量精度。
当前用于地磁矢量测量的传感器主要为三轴磁通门传感器,其测量精度和噪声水平与光泵、Overhauser等标量磁力仪具有一定差距。另外,地磁矢量场的测量精度还取决于姿态仪精度、误差校正和磁干扰补偿精度等因素的影响,因此当前地磁矢量场测量精度与地磁总场标量测量精度尚有一定差距,但随着新型磁矢量传感器如SQUID(超导量子干涉仪)、超高精度姿态仪的应用,有望使地磁矢量场的测量精度进一步提高。
参考文献
View Option
[1]
翟国君 , 黄谟涛 . 海洋测量技术研究进展与展望
[J]. 测绘学报 , 2017 , 46 (10 ):1752 -1759 .
[本文引用: 1]
Zhai G J Huang M T . The review of development of marine surveying technology
[J]. Acta Geodaetica et Cartographica Sinica , 2017 , 46 (10 ):1752 -1759 .
DOI:10.11947/j.AGCS.2017.20170309
[本文引用: 1]
The review of marine surveying technology is made in the aspects of the mingling of discipline, bathymetry and coastal topographic surveying, marine gravity surveying and geomagnetic surveying, and the application of marine survey information. The appearance of new branch of study, the establishment of surveying platform, the development of surveying equipment, the application of new theory, new technology, new method and the surveying information are reviewed. The future development trend of marine surveying is briefly presented.
[2]
孙昊 , 李志炜 , 熊雄 . 海洋磁力测量技术应用及发展现状
[J]. 海洋测绘 , 2019 , 39 (6 ):5 -8 ,20.
[本文引用: 1]
Sun H Li Z W Xiong X . Application and development of marine magnetic surveying technology
[J]. Hydrographic Surveying and Charting , 2019 , 39 (6 ):5 -8 ,20.
[本文引用: 1]
[3]
李园洁 , 魏东平 . 海底磁异常条带研究综述
[J]. 地球物理学进展 , 2016 , 31 (3 ):949 -959 .
[本文引用: 1]
Li Y J Wei D P . Review of research on oceanic striped magnetic anomalies
[J]. Progress in Geophysics , 2016 , 31 (3 ):949 -959 .
[本文引用: 1]
[4]
王向磊 , 田颜锋 . 基于地磁场的自主导航研究
[J]. 地球物理学报 , 2010 , 53 (11 ):2724 -2731 .
[本文引用: 1]
Wang X L Tian Y F . Autonomous navigation based Geomagnetic research
[J]. Chinese Journal of Geophysics , 2010 , 53 (11 ):2724 -2731 .
[本文引用: 1]
[5]
吴招才 , 高金耀 , 罗孝文 , 等 . 海洋地磁三分量测量技术
[J]. 地球物理学进展 , 2011 , 26 (3 ):902 -907 .
[本文引用: 1]
Wu Z C Gao J Y Luo X W , et al . Marine measurement of the three-component geomagnetic field
[J]. Progress in Geophysics , 2011 , 26 (3 ):902 -907 .
[本文引用: 1]
[6]
林君 , 刁庶 , 张洋 , 等 . 地球物理矢量场磁测技术的研究进展
[J]. 科学通报 , 2017 , 62 (23 ):2606 -2618 .
[本文引用: 1]
Lin J Diao S Zhang Y , et al . Research progress of geophysical vector magnetic field survey technology
[J]. Chinese Science Bulletin , 2017 , 62 (23 ):2606 -2618 .
[本文引用: 1]
[7]
谢汝宽 , 熊盛青 , 段树岭 , 等 . 基于航磁矢量数据的磁源总磁化方向估算
[J]. 地球物理学报 , 2021 , 64 (9 ):3368 -3378 .
DOI:10.6038/cjg2021O0359
[本文引用: 1]
在地质体具有较强剩磁或自退磁效应的情况下,获得地质体总磁化方向对磁法勘探的数据处理、反演及解释具有重要意义.与传统航磁总场测量相比,航磁矢量(三分量)测量能够获得地磁场的矢量信息.基于三分量磁异常一阶矩与磁源磁矩的积分关系,我们实现了基于航磁矢量数据的磁源总磁化方向估算.针对该方法易受相邻异常影响,从而使多异常的估算难以确定磁源中心位置的问题,分析了在不同磁化倾角下,估算的磁化偏角、倾角与实际磁源中心位置的关系,并根据该关系采取了限定估算区域的方法,获得了多异常的估算结果.将该方法应用于东天山启鑫地区实测航磁三分量数据,估算了具有强剩磁的启鑫岩体总磁化方向,并将估算的方向应用于化极计算.化极结果显示,减少了启鑫岩体磁异常受斜磁化的影响,且与磁异常模量计算结果类似.该方法假设磁源均匀磁化,估算结果可视为地质体总磁化方向的整体体现,对强剩磁地质体磁异常的数据处理、反演及解释具有实际意义.
Xie R K Xiong S Q Duan S L , et al . Estimating total magnetization direction of magnetic sources by using airborne vector magnetic data
[J]. Chinese Journal of Geophysics , 64 (9 ):3368 -3378 .
[本文引用: 1]
[8]
Gee J S Cande S C . A surface-towed vector magnetometer
[J]. Geophysical Research Letters , 2002 , 29 (14 ):1 -4 .
[本文引用: 1]
[9]
Seama N Nogi Y Isezaki N . A new method for precise determination of the position and strike of magnetic boundaries using vector data of the geomagnetic anomaly field
[J]. Geophysical Journal International , 1993 , 113 (1 ):155 -164 .
[本文引用: 1]
[10]
Engels M Barckhausen U Gee J S . A new towed marine vector magnetometer:Methods and results from a Central Pacific cruise
[J]. Geophysical Journal International , 2008 , 172 (1 ):115 -129 .
[本文引用: 1]
[11]
Lee S M Kim S S . Vector magnetic analysis within the southern Ayu Trough,equatorial Western Pacific
[J]. Geophysical Journal International , 2004 , 156 (2 ):213 -221 .
[本文引用: 1]
[12]
王文健 , 高金耀 , 吴招才 , 等 . 南极普里兹湾船载地磁三分量数据处理分析
[J]. 极地研究 , 2017 , 29 (3 ):349 -356 .
[本文引用: 1]
Wang W J Gao J Y Wu Z C , et al . Processing and analyses on shipboard three-component magnetometer data from Prydz bay,Antarctica
[J]. Chinese Journal of Polar Research , 2017 , 29 (3 ):349 -356 .
[本文引用: 1]
[13]
吴涛 . 西南印度洋脊热液硫化物区近底磁法研究—以龙旂与断桥热液区为例 [D]. 长春 : 吉林大学 , 2017 .
[本文引用: 1]
Wu T . Near-bottom magnetic study of hydrothermal fields on the Southwest Indian Ridge:Application to Longqi and Duanqiao hydrothermal fields [D]. Changchun : Jilin University , 2017 .
[本文引用: 1]
[14]
李苏芃 . 海洋水下拖曳式三分量磁测系统误差校正与干扰补偿方法研究 [D]. 长春 : 吉林大学 , 2023 .
[本文引用: 1]
Li S P . Research on error correction and interference compensation method of oceanic underwater towed three-component magnetic survey system [D]. Changchun : Jilin University , 2023 .
[本文引用: 1]
[15]
罗建刚 , 张峰 , 刘静晓 , 等 . 基于遗传算法的矢量磁测量非对准误差校正
[J]. 探测与控制学报 , 2021 , 43 (4 ):51 -57 .
[本文引用: 1]
Luo J G Zhang F Liu J X , et al . Misalignment error calibration of vector magnetic measurement based on genetic algorithm
[J]. Journal of Detection & Control , 2021 , 43 (4 ):51 -57 .
[本文引用: 1]
[16]
王林飞 , 薛典军 , 熊盛青 , 等 . 航磁软补偿质量评价方法及软件实现
[J]. 物探与化探 , 2013 , 37 (6 ):1027 -1030 .
[本文引用: 1]
Wang L F Xue D J Xiong S Q , et al . The method of quality assessment for digital magnetic compensation and software realization
[J]. Geophysical and Geochemical Exploration , 2013 , 37 (6 ):1027 -1030 .
[本文引用: 1]
[17]
黄谟涛 , 欧阳永忠 , 翟国君 , 等 . 海面与航空重力测量重复测线精度评估公式注记
[J]. 武汉大学学报:信息科学版 , 2013 , 38 (10 ):1175 -1177 .
[本文引用: 2]
Huang M T Ouyang Y Z Zhai G J , et al . Comment on the Formulas of accuracy evaluation for multi-line overlapping measurements in ship-borne and airborne gravity survey
[J]. Geomatics and Information Science of Wuhan University , 2013 , 38 (10 ):1175 -1177 .
[本文引用: 2]
[18]
徐东礼 , 叶挺明 , 舒晴 , 等 . 航磁重复线内符合精度计算方法
[J]. 物探与化探 , 2016 , 40 (1 ):125 -128 .
[本文引用: 1]
Xu D L Ye T M Shu Q , et al . The method of calculating internal accord accuracy for repeated lines in aeromagnetic survey
[J]. Geophysical and Geochemical Exploration , 2016 , 40 ( 1 ) :125 -128 .
[本文引用: 1]
[19]
GJB7537-2012.海洋磁力测量要求 [S]. 北京 : 总装备部军标出版发行部 , 2012 .
[本文引用: 2]
GJB7537-2012.Speciflcations for marine magnetic survey [S]. Beijing : Military Standard Publishing and Distribution Department of the General Equipment Department , 2012 .
[本文引用: 2]
海洋测量技术研究进展与展望
1
2017
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
海洋测量技术研究进展与展望
1
2017
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
海洋磁力测量技术应用及发展现状
1
2019
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
海洋磁力测量技术应用及发展现状
1
2019
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
海底磁异常条带研究综述
1
2016
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
海底磁异常条带研究综述
1
2016
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
基于地磁场的自主导航研究
1
2010
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
基于地磁场的自主导航研究
1
2010
... 海洋磁力测量技术是海洋测量技术的重要组成部分,是认识海洋、开发海洋的重要手段.海洋磁力测量可广泛应用于海洋资源探测、海底科学研究、水下磁目标物探测、水下潜器自主导航等方面[1 ⇓ ⇓ -4 ] . ...
海洋地磁三分量测量技术
1
2011
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
海洋地磁三分量测量技术
1
2011
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
地球物理矢量场磁测技术的研究进展
1
2017
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
地球物理矢量场磁测技术的研究进展
1
2017
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
基于航磁矢量数据的磁源总磁化方向估算
1
2021
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
基于航磁矢量数据的磁源总磁化方向估算
1
2021
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
A surface-towed vector magnetometer
1
2002
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
A new method for precise determination of the position and strike of magnetic boundaries using vector data of the geomagnetic anomaly field
1
1993
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
A new towed marine vector magnetometer:Methods and results from a Central Pacific cruise
1
2008
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
Vector magnetic analysis within the southern Ayu Trough,equatorial Western Pacific
1
2004
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
南极普里兹湾船载地磁三分量数据处理分析
1
2017
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
南极普里兹湾船载地磁三分量数据处理分析
1
2017
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
1
2017
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
1
2017
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
1
2023
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
1
2023
... 地磁场是空间中的矢量场,具有7个要素,分别是北向分量X 、东向分量Y 、垂向分量Z 、水平分量H 、磁偏角D 、磁倾角I 、总强度F .传统海洋磁力测量一般采用质子磁力仪、Overhauser磁力仪或光泵磁力仪获取地磁总场强度信息,但丰富的地磁矢量场信息未能被充分获取和利用[5 ] .目前,地磁矢量测量可以直接获取地磁场的3个要素,通过进一步计算可获取地磁场全部要素信息.研究表明,进行地磁矢量测量可以有效减少反演的多解性、提高目标物探测分辨率[6 -7 ] .国际上,美国、日本、德国等国家在海洋地磁矢量场测量技术研究方面起步较早,并取得了诸多研究成果[8 ⇓ ⇓ -11 ] ;在国内,自然资源部第二海洋研究所开展了基于测量船和AUV的地磁矢量场测量技术研究,将测量的地磁场分量转换成总场后,测量精度分别为47.56 nT[12 ] 和30 nT[13 ] ;吉林大学与广州海洋地质调查局等单位联合开展了海洋深拖地磁矢量场测量技术研究,海上测量的3个磁场分量数据的重复线内符合精度优于11 nT[14 ] .总体上讲,国内海洋地磁矢量场测量技术研究起步较晚,且在测量精度上尚与国外存在一定差距. ...
基于遗传算法的矢量磁测量非对准误差校正
1
2021
... 地磁矢量测量系统中主要包括三分量磁力仪和姿态仪,通常利用刚性无磁结构件将二者捷联安装,以实现二者之间高精度姿态传递,如图1 所示.在地磁矢量场测量过程中,三分量磁力仪采集其本体坐标系 O x m y m z m O x b y b z b O x g y g z g O x m y m z m O x b y b z b [15 ] ,过程如式(1): ...
基于遗传算法的矢量磁测量非对准误差校正
1
2021
... 地磁矢量测量系统中主要包括三分量磁力仪和姿态仪,通常利用刚性无磁结构件将二者捷联安装,以实现二者之间高精度姿态传递,如图1 所示.在地磁矢量场测量过程中,三分量磁力仪采集其本体坐标系 O x m y m z m O x b y b z b O x g y g z g O x m y m z m O x b y b z b [15 ] ,过程如式(1): ...
航磁软补偿质量评价方法及软件实现
1
2013
... 具体求取过程此处不详细展开.根据式(3)和求取的补偿参数对所有实测数据进行磁干扰补偿.图8 为补偿前、补偿后的磁场曲线对比,图中数据已旋转至地理坐标系下且抽稀至5 Hz,其中磁总场由3个分量计算得到.从图中可看出,在磁干扰补偿前,随着测量系统的移动及转向,磁场分量及总场出现了明显的波动,在补偿后数据曲线明显更加平稳.计算补偿前后标准差如表1 所示,并且基于参考文献[16 ]计算补偿改善率,与文献中不同点在于此处没有去除背景场的影响.由于补偿区域内受背景磁场变化的影响,补偿后的磁分量及总场数据曲线仍然存在一定的波动,导致补偿后的标准差仍然较大. ...
航磁软补偿质量评价方法及软件实现
1
2013
... 具体求取过程此处不详细展开.根据式(3)和求取的补偿参数对所有实测数据进行磁干扰补偿.图8 为补偿前、补偿后的磁场曲线对比,图中数据已旋转至地理坐标系下且抽稀至5 Hz,其中磁总场由3个分量计算得到.从图中可看出,在磁干扰补偿前,随着测量系统的移动及转向,磁场分量及总场出现了明显的波动,在补偿后数据曲线明显更加平稳.计算补偿前后标准差如表1 所示,并且基于参考文献[16 ]计算补偿改善率,与文献中不同点在于此处没有去除背景场的影响.由于补偿区域内受背景磁场变化的影响,补偿后的磁分量及总场数据曲线仍然存在一定的波动,导致补偿后的标准差仍然较大. ...
海面与航空重力测量重复测线精度评估公式注记
2
2013
... 在海空磁力测量中,一般是通过计算重复线和交叉点内符合精度的方法,对测量成果进行评价[17 ⇓ -19 ] .本次海上测量中进行了网格测线测量,并且在一些测线上进行了重复测量,形成了有效的交叉点和重复线,下面对重复线和交叉点的内符合精度进行评价. ...
... 进行多次往返重复线测量时,重复线内符合精度计算方法为[17 ] : ...
海面与航空重力测量重复测线精度评估公式注记
2
2013
... 在海空磁力测量中,一般是通过计算重复线和交叉点内符合精度的方法,对测量成果进行评价[17 ⇓ -19 ] .本次海上测量中进行了网格测线测量,并且在一些测线上进行了重复测量,形成了有效的交叉点和重复线,下面对重复线和交叉点的内符合精度进行评价. ...
... 进行多次往返重复线测量时,重复线内符合精度计算方法为[17 ] : ...
航磁重复线内符合精度计算方法
1
2016
... 在海空磁力测量中,一般是通过计算重复线和交叉点内符合精度的方法,对测量成果进行评价[17 ⇓ -19 ] .本次海上测量中进行了网格测线测量,并且在一些测线上进行了重复测量,形成了有效的交叉点和重复线,下面对重复线和交叉点的内符合精度进行评价. ...
航磁重复线内符合精度计算方法
1
2016
... 在海空磁力测量中,一般是通过计算重复线和交叉点内符合精度的方法,对测量成果进行评价[17 ⇓ -19 ] .本次海上测量中进行了网格测线测量,并且在一些测线上进行了重复测量,形成了有效的交叉点和重复线,下面对重复线和交叉点的内符合精度进行评价. ...
2
2012
... 在海空磁力测量中,一般是通过计算重复线和交叉点内符合精度的方法,对测量成果进行评价[17 ⇓ -19 ] .本次海上测量中进行了网格测线测量,并且在一些测线上进行了重复测量,形成了有效的交叉点和重复线,下面对重复线和交叉点的内符合精度进行评价. ...
... 交叉点内符合精度的计算公式为[19 ] : ...
2
2012
... 在海空磁力测量中,一般是通过计算重复线和交叉点内符合精度的方法,对测量成果进行评价[17 ⇓ -19 ] .本次海上测量中进行了网格测线测量,并且在一些测线上进行了重复测量,形成了有效的交叉点和重复线,下面对重复线和交叉点的内符合精度进行评价. ...
... 交叉点内符合精度的计算公式为[19 ] : ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}