

0 引言
为了发展对外贸易,维护经济可持续性发展,需扩(新)建海上航道,而扩(新)建前,需要进行海上航道地球物理勘查,工作内容包括:水深、海底地形测量,底质组成、厚度和分布勘察;在测量、勘察基础上进行疏浚设备和工艺选择,确保航道达到设计要求。因此,寻找经济、高效的海上航道地球物理勘查技术具有现实性和紧迫性。对于水深及海底地形测量,主要采用多波束测深技术。国内大学最早开展了多波束测深仪的研发,在成功研发仪器的基础上,将电子海图与GPS数据相结合,进行了反射波采集、处理、解释以及精度评估等方面的研究,保证了仪器的有效应用[1⇓-3];马建林[4]基于多波束测深数据,采用ArcGIS、GeoDatabase技术,建立了大区域、高分辨率的海底数字高程模型(DEM)并实现了数据库管理;一些学者应用国外的多波束测深仪进行了特定水域水深、海底地形测量[5⇓⇓⇓-9]。对于海底底质组成、厚度和分布的勘察,主要使用两种物探方法:人工地震法和浅地层剖面探测技术,前者采用穿透深度超过千米、频率百赫兹以内的波,分辨率低,成本高,主要应用于水上油气勘探;后者采用穿透深度百米以内、频率几百至几十千赫兹的波,分辨率高,成本低,主要应用于浅层天然气水合物勘探、地层结构和构造以及海底管线、沉船调查[10⇓-12],还可以基于浅地层剖面探测技术的海底反射信号进行海底地形测量[13]。目前,鲜有涉及两种技术同时应用于海上航道勘查领域的报道。海上航道的测量和勘察有其特殊性,需要获得水深、底质等资料,因此需要多波束测深、浅地层剖面探测两种技术的有机结合应用,实现经济、高效的海上航道地球物理勘查。
针对海上航道地球物理勘查的实际需求及现实问题,本文依托南方某港口30万吨新航道勘查项目,选取外航道K30+000至K31+100段,利用多波束测深技术和浅地层剖面探测技术,获得了新航道水深、海底地形以及底质的组成、厚度和分布,为新航道的疏浚设备和工艺的选择奠定了基础;同时,对涌浪较大时海上航道地球物理勘查系统选型、数据采集、关键技术处理措施、不同勘查技术获得的数据相互校核,对底质软土层、硬土层反演特征等进行了总结。上述成果不仅可供同行在开展类似工作时参考,而且能延拓到含有毒物质的水下沉积物调查工作中[14]。
1 项目概况
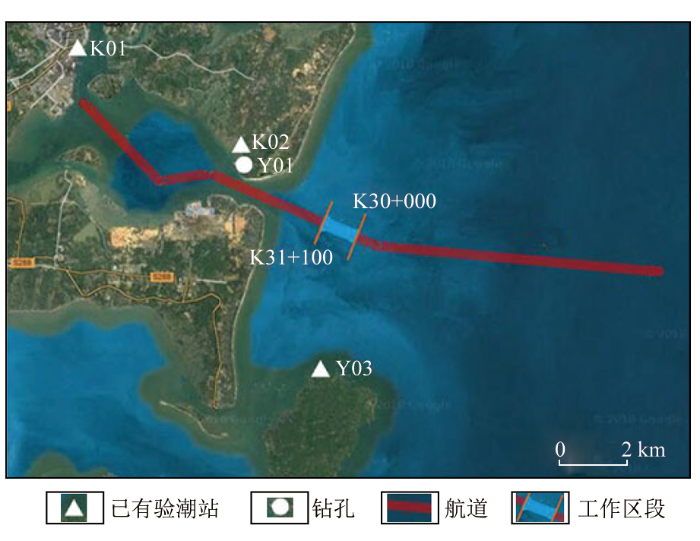
某港口30万吨级的旧航道需要加长、加宽和加深成为新航道。旧航道已运营多年,所在区域浪高0.5~1 m,受波浪和潮汐影响,海底沉积物发生了搬运、沉积,使旧航道的水深、海底地形发生了变化,因此,本次工作的重点是获得最新的水深、底质资料,以便为新航道疏浚及其他工程决策提供基础数据支持。新航道设计要求为:长度向外海方向延深10.1 km后变为64.1 km;航道边线各加宽15 m,宽度由310 m变为340 m;内航道水深由21.6 m变为23.0 m,外航道水深由21.9 m变为23.6 m(图1)。
图1
本着勘查方法经济高效和勘查资料准确的原则,此次工作布置了少量海上钻孔,并利用港口附近已有验潮站进行水位校正,同时选择多波束测深技术进行水深测量,选择浅地层剖面探测技术进行底质勘察,两种技术数据相互支持。
2 勘查原理
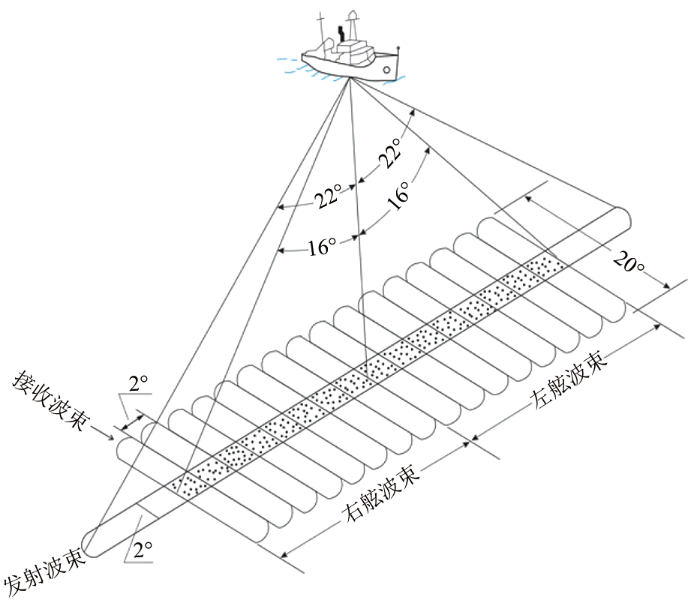
2.1 多波束测深技术原理
图2
2.2 浅地层剖面探测技术原理
浅地层剖面探测技术是利用声波在声阻抗界面即不同底质界面发生反射波与透射波,透射波在下一个底质界面继续产生反射波与透射波,因为接收到的反射波信息与穿透的底质物理性质有关,通过反演反射波得到的反射波振幅、反射系数获得底质特性[16]。以两层水平展布的底质为例:
式中:
3 勘查技术
3.1 准备工作
海上航道地球物理勘查的主要工作流程可归纳为4个阶段:准备工作—海上勘查—室内分析—成果输出。无论多波束测深还是浅地层剖面探测,准备工作阶段的要点如下:
1)平面控制采用已有的3个点:K01、K02、K03(图1)。
2)多波束测深线平行于航道中轴线,间距为4倍底质水深,相邻测深线间重叠大于20%,满足全覆盖要求;两组换能器阵安装在离测量船船头约1/3处且不活动的船舷侧面,超过船底10~30 cm,安装位置远离噪音源;表面声速仪固定在换能器阵上;光纤罗经固定在船重心位置,避免震动和电磁场干扰;定位系统安装在船头中间位置,接收机高出船体最高处;船速为5~6节。
3)浅地层剖面探测主测线平行于航道中轴线、沿新航道边线各布设1条主测线,另外布设了1条联络线。电火花水下声源和接收底质反射的宽间距拖曳式水听器阵列被列置于离探测船船尾30 m处,消除螺旋浆噪声对反射信号的影响。GPS接收机天线在底质反射源中心,在数据采集软件中进行坐标改正。探测参数:发射能量为1 200 J,触发时间0.6 s,记录深度100 m,延迟时间0.08 s;探测船的船速为3~4节,定标为等距离20 m。
4)新航道外边线上以长度1 km为单元布置1个钻孔。在外航道K30+000至K31+100段,浅地层剖面探测主测线上分别布置了ZK101、ZK42,钻孔深度以理论深度基准面为基准,超过外航道设计水深2 m孔底标高-25.60 m终孔。
表1 多波束测深系统主要部件
Table 1
| 序号 | 名称 | 型号 | 产地 | 备注 |
|---|---|---|---|---|
| 1 | Reson SeaBat多波束测深仪 | T20-P | 丹麦 | 频率:400~200 kHz;发射开角:>145°~>142°; 接收:1.1°±0.05°~2.2°±0.1°;深度:175~450 m |
| 2 | 光纤罗经和三维传感器 | Polaris FOG-200 | 英国 | 动态精度:±0.1°;分辨率:0.01° |
| 3 | 声速剖面仪 | HY1200 | 中国 | 分辨率:0.015 m/s |
| 4 | 表面声速仪 | Reson SVP70 | 丹麦 | 分辨率:0.01 m/s |
| 5 | 多波束数据采集软件 | PDS2000 | 丹麦 | |
| 6 | 多波束数据后处理软件 | Caris Hips/Caris Sips | 美国 | |
| 7 | GPS接收机 | 华测i80 | 中国 |
表2 浅地层剖面探测系统主要部件
Table 2
| 序号 | 名称 | 型号 | 产地 | 备注 |
|---|---|---|---|---|
| 1 | 甲板能量发射单元 | CSP-D2400J | 英国 | 能量输出:50~2 400 J;发射速率: 4次/s |
| 2 | 电火花水下声源 | Squid 2400 | 英国 | 水面拖曳作业,水下0.2~0.4 m发射声源; 穿透深度:80~200 m;分辨率:25~35 cm |
| 3 | 宽间距拖曳式水听器阵列 | 20单元 | 英国 | |
| 4 | 接收机 | Geopulse 5210A型 | 英国 | 磁带记录 |
| 5 | 数据采集和处理工作站 | SonarWiz 5 | 美国 | |
| 6 | GPS接收机 | Trimble SPS351 | 美国 |
3.2 主要工作流程
图3给出了多波束测深的主要工作内容:①海上勘查,主要包括平面定位、部件安装和调试、现场校正、声速测定;②室内分析,把海上勘查获得的原始数据导入到处理软件,室内校正后得到数字化勘查成果;③成果输出,把数字化勘查成果变成水深图、海底地形图。
图3
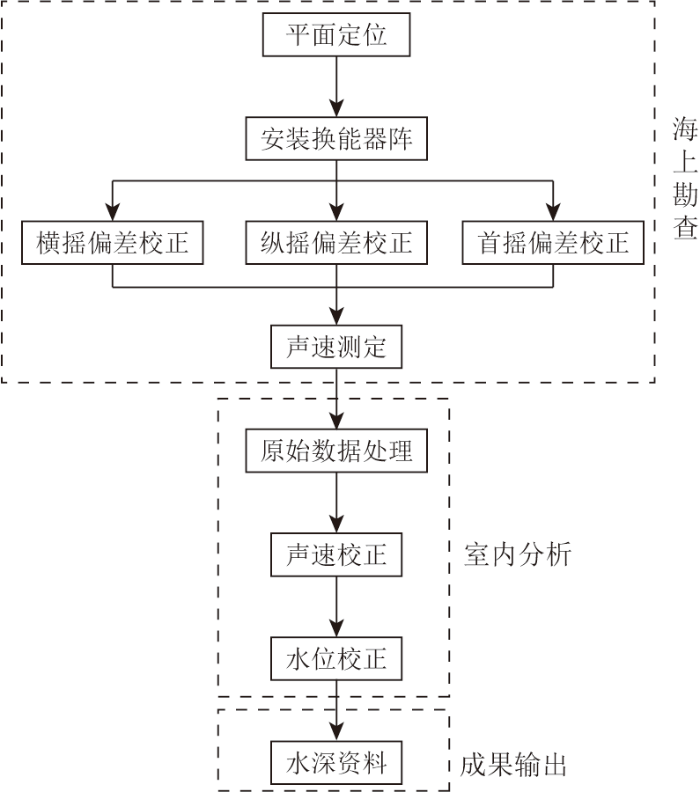
浅地层剖面探测的主要工作流程与图3展示的内容基本相同,在室内分析阶段增加了以海上钻孔资料为基础的底质特性反演及用多波束测深获得的海底地形数据对浅地层剖面进行海底归位校正,而成果输出是把数字化勘查成果变成浅地层剖面图。
3.3 室内分析关键技术措施
3.3.1 水位校正
由于海面时时变化,导致船上发射、接收声波的系统部件在起始点高度上下起伏,需要进行水位校正。水位校正是提高勘查精度的关键环节之一,通常采用2种方法:①近海区域利用或建立验潮站;②全球定位导航系统。本航道勘查时利用港口附近已有的验潮站进行水位校正,验潮站位于距离外航道K30+000~K31+100段最近的Y01(图1)。
多波束测深系统水位校正原理如图4所示。以1985国家高程基准点为基础,水深测量前10 min开始在验潮站观测海面高程h3,此后每隔10 min观测一次,直至测量结束后10 min。以时间为横坐标、以海面高程为纵坐标绘制曲线图。1985国家高程基准点和理论深度基准面之间的深度h2是固定已知的,因此可以把多波束测深过程中得到的每10 min实时海面高程归算至理论深度基准面,即航道水深h1=H-h2-h3。
图4
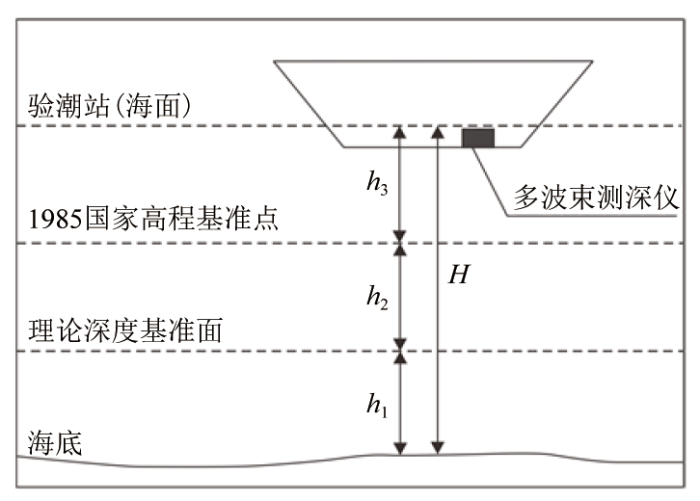
图4
多波束测深水位校正原理示意
Fig.4
Schematic Diagram of water level correction with multi beam sounding
3.3.2 浅地层剖面探测反演
浅地层剖面探测技术反演是基于不同年代或不同沉积物底质会产生不同的底质声阻抗界面来获得底质界面。反演要点为:利用钻孔资料确定声阻抗界面,然后在浅地层剖面探测声图中进行该声阻抗界面的追踪;进行海底归位校正;利用主测线和联络线的交点,进一步验证声阻抗界面的判断。
基于上述反演要点,需要在剖面图上计算出每一个定位点的声阻抗界面之间的厚度数值。由于剖面记录的是时间分量,因此要进行以理论深度基准面为基准的深度转换。根据航道区域已有底质沉积物声学研究成果,把底质浅部沉积松散层声波速度选定为1 600 m/s。利用该速度进行深度转换,得到底质界面之间的厚度。
4 成果解释
图5
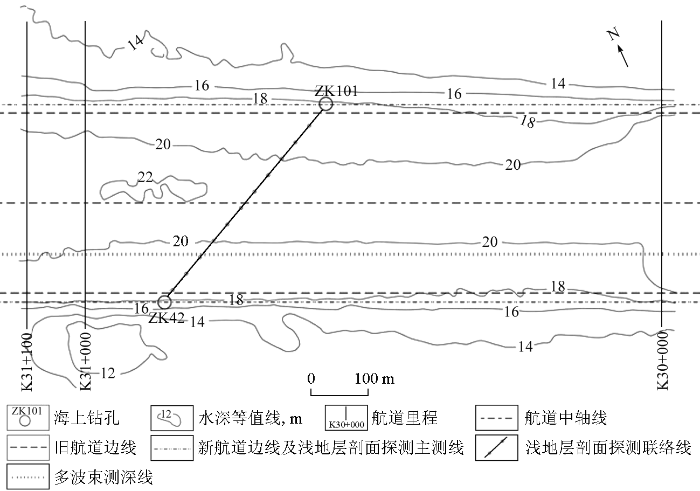
图5
K30+000至K31+100航道段实测水深等值线平面
Fig.5
Actual bathymetric chart of K30+000 to K31+100 Channel
图6
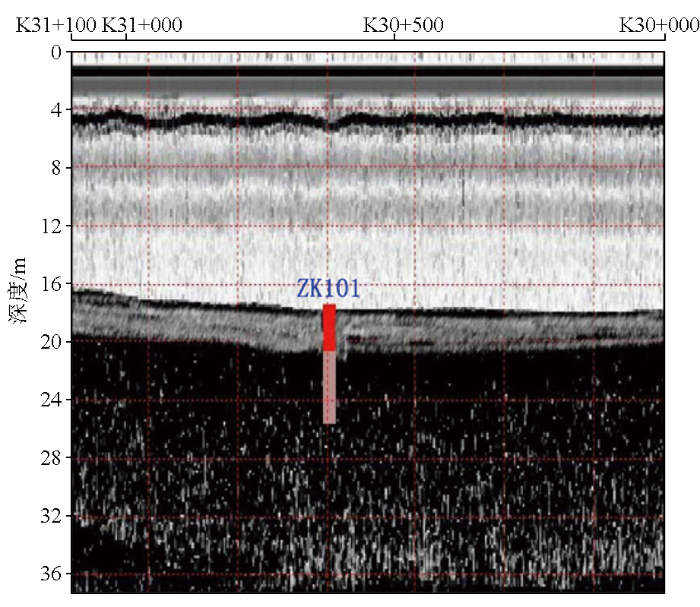
图6
K30+000至K31+100航道段浅地层剖面
Fig.6
Sub-bottom profiler K30+000 to K31+100 Channel
图5显示:①旧航道两侧水深小、中间水深大,水深范围为18~22 m;②旧航道水深等值线沿航道中轴线平行分布;③旧航道边线外延加宽15 m部分,水深为16~18 m;④旧航道水深达不到新航道水深23.6 m的设计要求。
利用浅地层剖面探测技术勘查底质时,将声波易穿透的底质称为软土层,如淤泥、淤泥质黏土,软土层在浅地层剖面图中灰度强,易被识别;将声波不易穿透的底质统称为硬土层,如砂、黏土、粉土和砾砂,硬土层在浅地层剖面图中灰度弱,不易被识别[16⇓-18]。图6、表3显示浅地层剖面分为两层:上部灰度强,判断为软土层,相当于ZK101钻遇的淤泥、淤泥质粉质黏土组成的底质,下部灰度弱,判断为硬土层,相当于ZK101钻遇的中砂、粉质黏土和砾砂组成的底质;两种底质厚度均匀、近水平分布。图6显示ZK101所在的浅地层剖面探测主测线水深为18 m,按设计要求,需疏浚5.6 m,因此需要进入4 m厚的软土层以及1.6 m的硬土层,根据地层特征,使用耙吸、链斗、铲斗等一般疏浚方法即可。
表3 ZK101钻孔底质地层
Table 3
| 序号 | 岩性 | 厚度/m | 地层特征 | 备注 |
|---|---|---|---|---|
| 1 | 淤泥 | 1.50 | 灰黑色,流塑,土质不均匀,略有腐臭味,含贝壳碎屑 | 软土层 |
| 2 | 淤泥质粉 质黏土 | 2.50 | 灰黑色,流塑,土质不均匀,略有腐臭味 | |
| 3 | 中砂 | 3.00 | 灰黑色,中密,分选性一般,级配不良,成分以石英、长石为主 | 硬土层 |
| 4 | 粉质黏土 | 1.90 | 灰黑色、灰黄色,可塑,土质不均匀,黏性较好,局部含少量砂粒 | |
| 5 | 砾砂 | 1.40 | 灰黑色,中密,分选性一般,级配不良,成分以石英、长石为主 |
5 结论
1)在近海区域进行航道勘查时,可用已有验潮站进行水位校正,降低勘查成本。
2)用浅地层剖面探测技术勘查海上航道底质时,最好采用电火花水下声源,其通过高压放电气化海水产生爆炸声波,声波能量高,穿透深度大。在浅地层剖面图上,软土层灰度强,容易被识别,而硬土层灰度弱,不易被识别。
3)进行海上航道勘查时,要把波束测深技术、浅地层剖面探测技术和海上钻孔有机地结合起来,数据相互校核,提高勘查精度,且能获得水深、底质等数据,也能为疏浚设备和工艺的选择提供依据,提高勘查效率。
4)本文得到的海上航道勘查时的勘查系统选型、准备工作、数据采集、关键技术处理措施和基于海上钻孔的反演要点等,也适用于江河、湖上区域的水上勘查。
参考文献
多波束测深在海洋工程勘察中的应用
[J].
The application of multi-beam sounding to marine engineering exploration
[J].
深中通道深水区管节基槽回淤特征分析
[J].
Analysis of characteristics of back-siltation in foundation trench for immersed tunnel segments in deep water area for Shenzhen-Zhongshan link project
[J].
海洋工程物探勘察中的几种声学假象
[J].
Several acoustic artifacts in marine engineering geophysical survey
[J].
基于多波束测深技术的海底地形测量
[J].
Seabed topography measurement based on multi-beam bathymetry technology
[J].
浅水多波束测深资料处理关键技术探讨
[J].
The discussion on shallow multi-beam echo sounding data processing method
[J].
浅地层剖面探测技术及应用
[J].
Development and application of sub-bottom profiler technologies
[J].
浅地层剖面原始数据中海底反射信号的识别及海底地形的自动提取
[J].
The recognition of the seabed reflection signal and the automatic pickup of seabed topography from the original data of sub-bottom profile
[J].
长期浸水条件下重塑固化疏浚土中重金属浸出特性
[J].
Heavy metals’ leaching behavior of remolded stabilized dredged sediment under long-term immersion
[J].
浅地层剖面探测综述
[J].
Review on the probing of sub-bottom profiler
[J].
均质软黏土中双筒吸力桩基础最佳荷载作用点不排水承载特性数值分析
[J].
Numerical study on undrained uplift bearing capacity of optimal loading point of double-bucket suction pile foundation in homogeneous soft clay
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}