

0 引言
在道路质检与维护中,GPR将道路下方的整体信息呈现在二维雷达剖面图上(B-scan),其中的空洞、脱空、疏松体等病害[7]与雨污井、地下管线、线缆等人工构筑物信息统称为探地雷达道路数据的感兴趣区域(region of interest,ROI)。在面对ROI提取时,一方面,传统人工识别方法对工作人员的技术提出很高要求,同时面对海量GPR探测数据的人工识别与提取给一般人员的精力也提出不小挑战;另一方面,在用于道路质检时,很长的GPR剖面中绝大部分区域并不存在异常,人工识别方法提取ROI效率低下,经济性差。为此,ROI自动提取技术在GPR数据识别中受到越来越广泛的关注。
随着人工智能方法的快速进步,以R-CNN、Faster R-CNN、YOLOv3等为代表的深度学习技术在ROI自动化提取与识别方面逐渐展现出较大的应用潜力,但该类技术前期通常依赖庞大且已解释和验证的数据集作为支撑,给其实际应用带来极大障碍[8]。基于GPR信号特征的ROI自动提取技术具有数据依赖度低的优点,特别适用于解决实际工程问题。刘普等[9]建立包括空洞、脱空等病害的地质建模,分析了其GPR信号特征,利用GPR数据的行方差方法初步对ROI进行提取,并勾勒出异常目标体位置信息。但是,若一个GPR剖面内存在多个目标时,该方法将无法区分具体的目标体。此外,地下管线和钢筋目标在GPR剖面上呈现较特殊的双曲线特征,因此这两类目标提取的研究报道较多。例如:张旭等[10]提出先采用Canny算子进行边缘检测再提取双曲线的异常目标识别算法得到雷达目标反射图像;Mertens等[11]通过将双曲函数拟合基于 Canny 滤波器检测的双曲线轮廓边缘点和顶点来识别反射双曲线;Ma等[12]提出了一种无监督、高效、鲁棒的模式识别算法,自动检测桥面路基中的钢筋。可以发现,根据地下管线、电缆和钢筋等成像特征[13⇓-15]来识别ROI可以获得良好性能,但是在实际复杂的道路环境中,除了管线和钢筋异常外,往往会同时存在其他类型的异常,此时采用上述算法效果不佳。
为解决上述问题,本文提出基于行列方差与阈值分割相结合的方法实现ROI的自动提取,能够有效地获得GPR道路数据ROI的位置信息。该方法适用于同一个GPR剖面上存在多种异常类型、多个ROI目标的情况。
1 本文算法
1.1 算法原理
由概率论和数理统计理论可知,方差可用来度量随机变量和数学期望(即均值)之间的偏离程度,方差越大随机变量的结果越不稳定,易形成突变。通过计算不同变量对总体突变的贡献,可以量化变量突变的影响程度。这里,假设样本数据为
其中M为样本数据均值,表达式为
在GPR的B-scan数据中,横坐标和纵坐标分别代表道号和采样点,其中的方差又区分为列方差和行方差。行方差是对每一采样点的n道数据做方差处理,而列方差是对每一道的n个采样点数据做类似处理。通常情况下,GPR目标体对应的ROI区域内行列方差数值比较大,ROI区域外行列方差值相对较小甚至为0。为此,可以在行列方差基础上,引入适当的阈值分割并提取GPR的B-scan数据中的ROI。
1.2 计算行列方差分布
以Matlab计算环境为例,其中的Var函数可计算二维数据方差。假设x为探地雷达采集的二维数据,利用式(3)和式(4)可分别计算其行方差数值为x_row和列方差数值x_col:
x_row和x_col分别存储着x行列方差值的向量,基于它们可得到GPR数据的行列方差分布,从而直观地反映ROI的整体情况。
图1
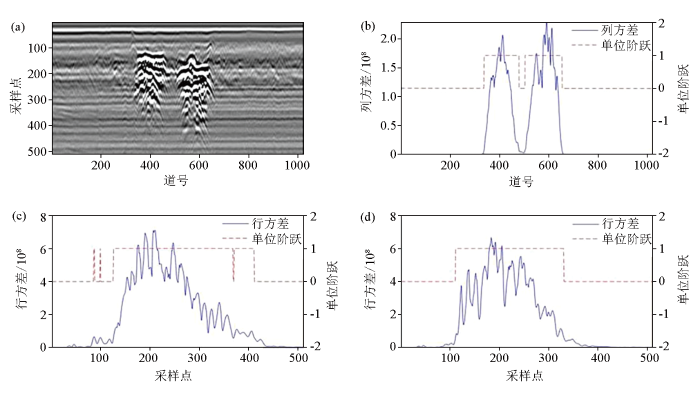
图1
雷达剖面图及行列方差分布
a—原始雷达B-scan图像;b—列方差与单位阶跃;c—目标1行方差与单位阶跃;d—目标2行方差与单位阶跃
Fig.1
Radar profile and row-column variance distribution
a—original radar B-scan image;b—column variance and unit step;c—target 1 line variance and unit step;d—target 2 row variance and unit step
1.3 阈值分割提取B-scan数据ROI
正态分布可以反映随机变量的分布规律。利用B-scan原始数据中待识别目标和背景区域方差的差异,正态分布曲线的标准差
设B-scan原始数据的方差分布为
其中,阈值法的关键是选取能够使目标和背景明显区分的阈值[16],通过原始数据方差分布与阈值对比判定目标位置。
对图1a采用阈值判别后的单位阶跃曲线如图1b~d红色虚线所示。在ROI信息提取时,选择单位阶跃曲线中“1”状态连续的道号组成ROI道间区域,将连续道号映射到原始数据,完成对列方差的处理;对行方差采用类似的处理方式,提取ROI图像,如图2所示。从中我们发现,单一的行方差处理,只能确定目标的“深度”信息,不能获取ROI的位置信息;反之,单一的列方差处理,仅能得到ROI的位置信息,但不能确定“深度”信息。把二者结合,自动提取ROI的完整信息,如图2b、c所示。为了直观地呈现ROI提取效果,基于Matlab环境的rectangle函数用矩形框对ROI标注,以数值形式给出异常目标的对角位置信息(图2a红框位置)。
图2
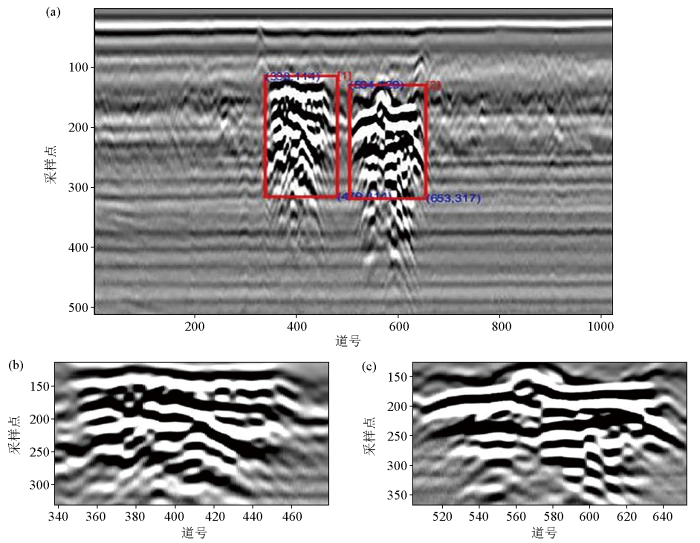
图2
行列方差ROI提取及标注
a—ROI标注;b—1号目标体ROI;c—2号目标体ROI
Fig.2
Row-column variance ROI extraction and labeling
a—ROI labeling;b—ROI of target No.1;c—ROI of target No.2
1.4 算法实现流程
结合前述分析,本文提出的ROI提取算法流程如图3所示。提取ROI前,需要对原始数据进行预处理,其目的在于滤除原始数据含有干扰ROI提取效果的各类噪声。此外,预处理还可以增强目标弱回波信号,有效提高ROI提取准确率。
图3

2 算例实现与分析
2.1 多类型、多目标ROI提取
图4
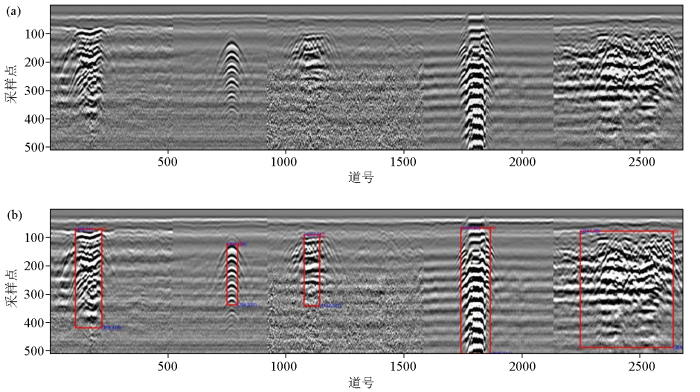
图4
存在多目标的ROI提取
a—雷达B-scan原始图像;b—ROI提取效果
Fig.4
ROI extraction with multiple targets
a—radar B-scan original image;b—ROI extraction effect
表1 多类型、多目标及其位置信息
Table 1
| 目标类型 | 目标编号 | 目标位置 |
|---|---|---|
| 空洞 | 1 | (108,71;219,418) |
| 管线 | 2 | (750,124;794,337) |
| 钢筋网 | 3 | (1077,91;1142,341) |
| 雨污井 | 4 | (1741,67;1865,511) |
| 疏松体 | 5 | (2147,78;2640,487) |
2.2 方法有效性分析
这里对在青岛市江西路采集的20 000道实测GPR数据进行处理并标注目标区域,结合背靠背测试方法对其分析和验证,即先由专业人工筛查方法标出异常区域,再用本文提出的方法自动提取并标注ROI,最后以专业人工筛查结果为基准分析自动提取ROI的检测率,以进一步阐明提出方法的有效性。检测率η可表示为
其中:T0是专业人工筛查出来的异常区域总数;T是本文方法在专业人工筛查出的异常区域中自动提取标注的ROI总数。
表3 ROI对应目标类型及其自动提取编号
Table 3
| 目标类型 | 目标编号 |
|---|---|
| 空洞、脱空 | 12, 23, 25, 28, 36, 37, 39, 40, 46 |
| 疏松体 | 3, 17, 29, 31, 35, 38, 43 |
| 钢筋网 | 15, 22 |
| 雨污井 | 2, 18, 42 |
| 管线 | 30, 41 |
图5
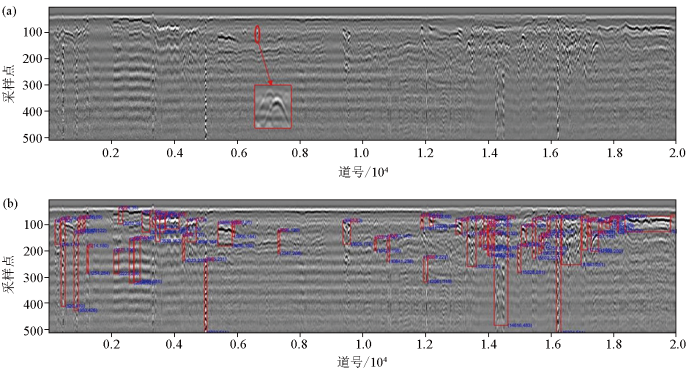
图5
青岛市江西路B-scan图及对于提取的ROI
a—青岛市江西路B-scan(插图为自动提取遗漏的ROI);b—自动提取ROI
Fig.5
B-scan diagram of Jiangxi road in Qingdao and the extracted ROI
a—B-scan diagram of Jiangxi road,Qingdao(illustration is automatic extraction of missing ROI);b—automatically extracting ROI
3 结论
本文提出了一种基于行列方差结合阈值分割数据自动提取ROI的算法。试验结果表明,本文算法有效地提取了探地雷达道路地下ROI,同时标记出ROI的位置信息。该方法能同时自动提取多种异常类型、多个ROI目标,对解决传统人工提取方法存在的技术水平高、工作强度大、检测效率低等问题具有重要的现实意义。
参考文献
Christian Hulsmeyer:Invention and demonstration of radar,1904
[J].DOI:10.1109/MAES.2019.2934814 [本文引用: 1]
探地雷达测试技术发展概况及其应用现状
[J].
Development and application of ground penetrating radar
[J].
A case study on detection of subsurface cavities of urban roads using ground-coupled GPR
[C]//
A real-time method for landmine detection using vehicle array GPR
[C]
The archaeo track project:Use of ground-penetrating radar for preventive conservation of buried archaeology towards the development of a virtual museum
[C]//
基于深度学习的隧道衬砌结构物探地雷达图像自动识别
[J].
Automatic recognition of GPR image of tunnel lining structure based on deep learning
[J].
基于行方差的GPR图像感兴趣区域提取定位方法
[J].
A method of extracting and locating regions of interest in GPR images based on row variance
[J].
探地雷达目标回波信号双曲线提取算法研究
[J].
Research on hyperbolic extraction algorithm of ground penetrating radar target echo signal
[J].
Automated detection of reflection Hyperbolas in complex GPR images with no a priori knowledge on the medium
[J].DOI:10.1109/TGRS.2015.2462727 URL [本文引用: 1]
Automatic detection of steel rebar in bridge decks from ground penetrating radar data
[J].DOI:10.1016/j.jappgeo.2018.07.010 URL [本文引用: 1]
基于GPRMax2D的地下管线精细化探测方法
[J].
Refined detection method of underground pipeline based on GPRMax2D
[J].
地下电缆的探地雷达图像特征与识别技术
[J].
Imaging detection and recognition technology of underground cable based on ground penetrating radar
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}