0 引言
磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质。二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面。在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] 。航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响。载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] 。载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一。
1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿。影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性。地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响。文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大。但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行。此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化。Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力。由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响。近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题。
基于总场模型的载体补偿大部分是建立在地磁场恒定的前提假设下,存在求解系数的病态性问题和忽略了地磁梯度的影响。本文提出了基于矢量测量的在线载体磁补偿优化方法,将磁总场补偿转化到对分量的补偿。通过改变飞机载体的运动状态,从而达到简化模型的效果,改善了求解补偿系数的病态性问题,并与传统方法进行对比仿真,验证了该方法的可行性;由于本文方法是在线载体补偿,通过仿真验证了可以有效降低地磁梯度的影响;最后利用HLS工具验证了在线载体磁补偿方法在硬件系统上的实时性和补偿精度的有效性。
1 基本T-L载体补偿模型
根据T-L载体补偿模型,恒定场相对于载体是静止不变的磁场;感应场是由载体自身的软磁性材料磁化所形成的磁场;涡流场由穿过载体的磁通量变化率所产生 [16 ] 。由恒定场、感应场及涡流场磁场矢量叠加形成了飞机载体平台的磁干扰,如式(1)所示。
(1) H → i = H → p e r + H → i n c + H → e d d
其中:H p e r H i n c H e d d
(2) H → p e r = ( H p x , H p y , H p z ) c o s α c o s θ c o s φ
其中:c o s α c o s θ c o s φ H p x H p y H p z
感应场是载体自身的部分软磁性材料受到地磁场的磁化而形成,且与地磁场的强度呈正比关系,并不与地磁场的方向一致。因此可以将感应场表示为载体软磁性材料沿着载体坐标系三轴方向磁化所产生的感应磁场之和,如式(3)所示:
(3) H → i n c = ( c o s α , c o s θ , c o s φ ) a 11 H e ( t ) a 12 H e ( t ) a 13 H e ( t ) a 21 H e ( t ) a 22 H e ( t ) a 23 H e ( t ) a 31 H e ( t ) a 32 H e ( t ) a 33 H e ( t ) c o s α c o s θ c o s φ
涡流场是由穿过载体的地磁场磁通量变化所形成的,且涡流场的大小与地磁场强度的变化率呈正比关系。涡流场可以表示为地磁场在载体坐标系三轴方向的磁通量变化所产生的涡流磁场之和,如式(4)所示:
(4) H e d d = ( c o s α ' , c o s θ ' , c o s φ ' ) b 11 H e ( t ) b 12 H e ( t ) b 13 H e ( t ) b 21 H e ( t ) b 22 H e ( t ) b 23 H e ( t ) b 31 H e ( t ) b 32 H e ( t ) b 33 H e ( t ) c o s α c o s θ c o s φ
(5) H → i = H → p e r + H → i n c + H → e d d = p 1 u 1 + p 2 u 2 + p 3 u 3 + a 11 ' u 1 2 + 2 a 12 ' u 1 u 2 + 2 a 13 ' u 1 u 3 + a 22 ' u 2 2 + 2 a 23 ' u 2 u 3 + a 33 ' u 3 2 + b 11 ' u 1 u 1 ' + b 12 ' u 1 u 2 ' + b 13 ' u 1 u 3 ' + b 21 ' u 2 u 1 ' + b 22 ' u 2 u 2 ' + b 23 ' u 2 u 3 ' + b 31 ' u 3 u 1 ' + b 32 ' u 3 u 2 ' + b 33 ' u 3 u 3 '
其中:u 1 = c o s α u 2 = c o s θ u 3 = c o s φ u 1 ' u 2 ' u 3 ' u 1 u 2 u 3 a i j ' = a i j H e ( t ) i = 1,2 , 3 , j = 1,2 , 3 b i j ' = b i j H e ( t ) i = 1,2 , 3 , j = 1,2 , 3
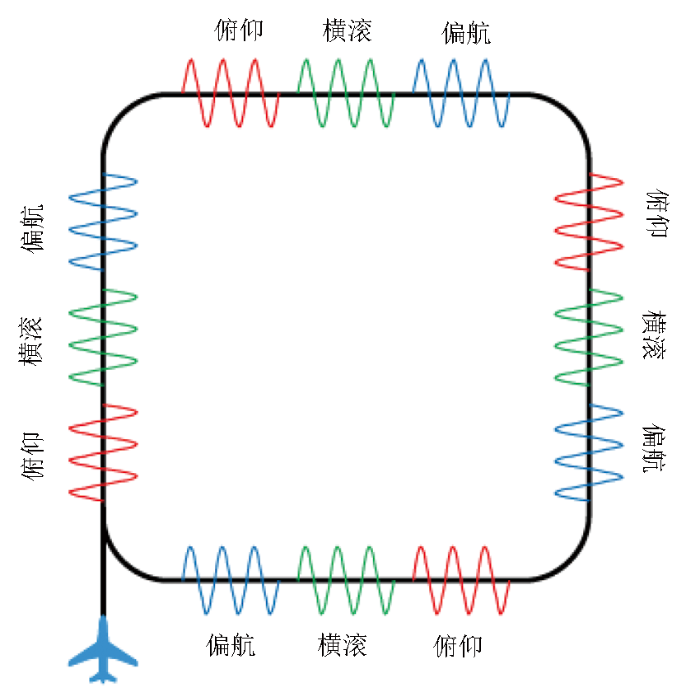
由式(5)可知,该方程包含18个未知变量,且变量之间存在严重的相关性,进而产生了病态性。而且对于矢量磁强计的载体补偿来说,其中部分系数无法进行合并,实际需要求解的系数更多。此外,为了能够更准确地估计补偿系数,需要设计复杂的飞行方式,包含4个完全正交的航向,在每个航向上,飞机需要进行3种不同类型的机动动作,如图1 所示。
图1
图1
总场校准飞行示意
Fig.1
Schematic diagram of total field calibration flight
2 基于矢量测量的在线载体磁补偿优化模型
针对传统的载体补偿均是基于总场测量的18项补偿系数模型,求解系数存在病态性问题,本文提出了基于矢量测量的在线载体补偿优化模型。文献[14 ]研究发现恒定场和感应场是由在载体上的铁磁性物质所引起的,相较于涡流场,它们的强度大得多。载体外1 m处的涡流磁场强度最大值不足地磁场的0.04%[17 ] ,且通过对飞机载体进行无磁化改装,利用无磁性材料替换机体中大面积块状金属导电材料削弱涡流磁场,可有效规避涡流磁场干扰[18 ] 。此外,在进行在线载体磁补偿过程中,若载体保持近似匀速直线运动,这样穿过载体的磁通变化率减小,进一步降低了涡流场的影响,同时也简化了补偿飞行时的机动方式,此时载体磁补偿模型简化为:
(6) H → i = H → p e r + H → i n c
无磁异常目标的情况下,矢量磁强计的测量值为地磁场矢量和载体磁干扰矢量的叠加:
(7) H → m = H → + p e r H → i n c + H → e
(8) H m x = H p x + H e x · a 11 + H e y · a 21 + H e z · a 31 + H e x H m y = H p y + H e x · a 12 + H e y · a 22 + H e z · a 32 + H e y H m z = H p z + H e x · a 13 + H e y · a 23 + H e z · a 33 + H e z
其中:H e x H e y H e z
(9) H m x = H p x + H e ( 1 + a 11 ) · c o s α + H e a 21 · c o s θ + H e a 31 · c o s φ H m y = H p y + H e a 12 · c o s α + H e ( 1 + a 22 ) · c o s θ + H e z a 32 · c o s φ H m z = H p z + H e a 13 · c o s α + H e a 23 · c o s θ + H e ( 1 + a 33 ) · c o s φ
由式(9)可以看出,在该矢量载体磁补偿模型中,每个测量分量存在4个独立的补偿系数,以x 轴为例,4个独立的补偿系数分别为H p x H e ( 1 + a 11 ) H e a 21 H e a 31 H m x c o s α c o s θ c o s φ H m x H m y H m z
(10) c o s α = H m x H m x 2 + H m y 2 + H m z 2
(11) c o s θ = H m y H m x 2 + H m y 2 + H m z 2
(12) c o s φ = H m z H m x 2 + H m y 2 + H m z 2
由于载体磁干扰的存在,上述求解方法存在一定的误差。可以在载体起飞之前进行静态补偿以获取精确的初始方向余弦,再利用惯导(惯导的精度问题是根据我们仪器的数据手册提供的,仿真时根据其精度来创建数据的)实时测得的姿态角数据进行旋转变换后可以获取飞行过程中的实时方向余弦值,即
(13) D t → = R D → 0
其中:D → t D → 0 R [19 -20 ] 。
(14) c o s β × c o s γ c o s β × s i n γ - s i n β s i n α × s i n β × c o s γ - c o s α × s i n γ s i n α × s i n β × s i n γ + c o s α × c o s γ s i n α × c o s β c o s α × s i n β × c o s γ + s i n α × s i n γ c o s α × s i n β × s i n γ - s i n α × c o s γ c o s α × c o s β
其中:α x 轴的旋转角度;β y 轴的旋转角度;γ z 轴的旋转角度。
综上所述,基于矢量测量的动态载体磁补偿优化方法步骤如下:
1)载体起飞前对载体进行静态磁校准。根据椭球假设理论[21 ] , 将载体与磁强计作为一个整体,以某一点为球心做覆盖球面的旋转运动,持续10 s时间,完成对磁强计误差的校准,用校准后的磁场数据获取初始的方向余弦向量;
2)载体上升到巡航高度后,尽量保持匀速直线运动且姿态变化尽可能小,以确保可以忽略涡流场的影响;
3)根据式(9)及式(13),4个独立补偿系数的求解只需较少的采样点即可完成,由于日变项和地磁梯度的存在,每隔一段飞行距离需要实时计算一组新的补偿系数。
3 仿真试验与实测结果
为了验证本文提出的基于矢量测量的在线载体磁补偿优化方法,将本文方法、传统总场方法分别在考虑地磁梯度和不考虑地磁梯度的情况下进行对比仿真;本文方法、传统总场方法的病态性问题对比仿真;本文方法对于三分量、姿态角求方向余弦的补偿结果对比仿真。对于补偿结果的优劣有3种补偿指标[10 ] :
1)品质因数(FOM),为补偿结果中的12个机动动作区间内的峰峰值之和;
3.1 仿真条件
本次仿真试验利用MATLAB软件,并通过regress函数求解补偿系数。设地磁场初始值为50 000 nT,载体速度为10 m/s,采样率为10 Hz,并沿着北向分量x 直线匀速飞行,在该航线上分别作俯仰角、横滚角、偏航角分别为±10°、±10°、±10°范围内的正弦机动。根据Mag-03三分量磁强计的噪声标准差为6 pT,故试验中三分量各加入了均值为0,标准差为18 pT的高斯白噪声来模拟随机噪声,最后矢量叠加成总场形式再与传统总场方法对比,传统总场方法的总场测量值则加入同等幅度的高斯白噪声。
3.2 地磁场梯度对载体补偿的影响
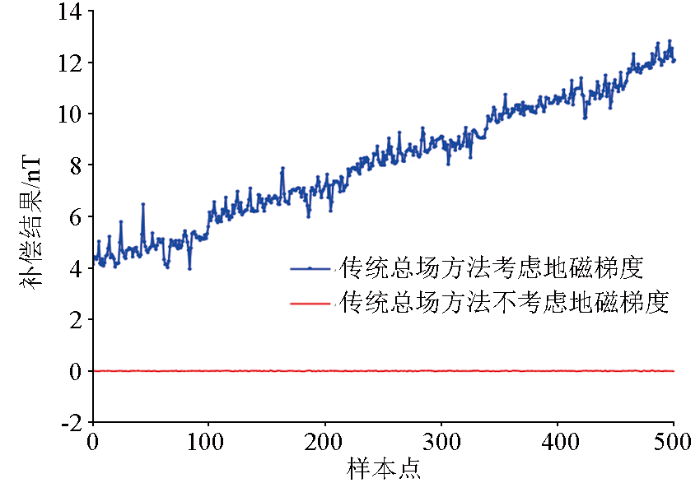
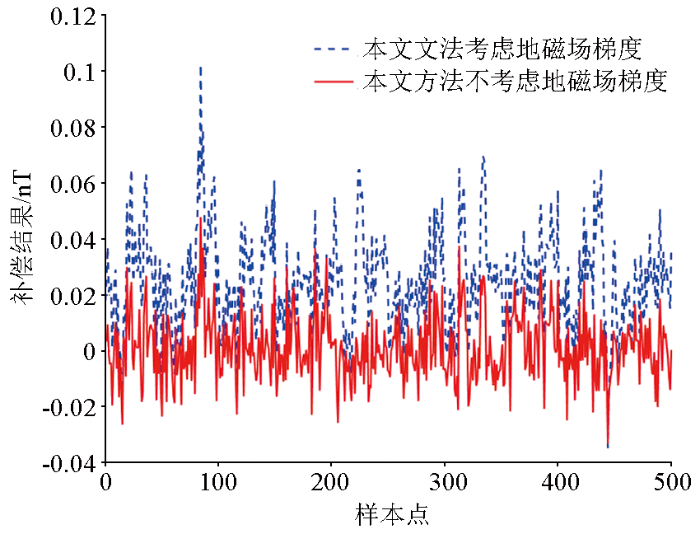
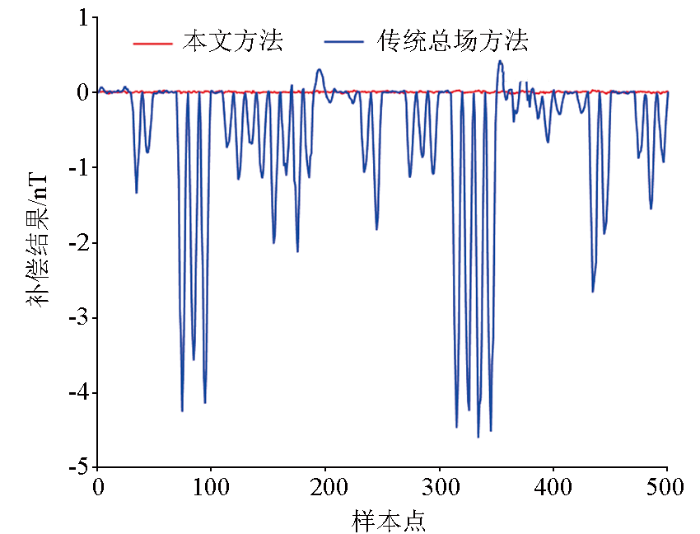
为了验证地磁梯度对本文方法的影响,分别将本文方法和传统总场方法在不考虑地磁场梯度、考虑地磁场梯度(不考虑地磁梯度的仿真条件是地磁场值不变,考虑地磁梯度则是地磁场值随着位置改变)的情况下进行对比仿真试验。仿真试验除了满足3.1小节的试验条件外,还要设置地磁场的梯度变化。文献[19 ]研究发现在中国18°N~54°N和73°E~136°E地区范围内的0~10 km高空中,地磁场北向分量x 、东向分量y 、垂直分量z 和总场F 的磁场梯度近似呈线性变化,分别为-4.694 nT/km、0.168 nT/km、-15.717 nT/km和-16.583 nT/km。根据文献[19 ]的地磁场梯度、载体运动速度和采样率,通过计算得出在分量x 、分量y 、分量z 和总场的磁场变化率分别为-0.004 694 nT/s、0.000 168 nT/s、-0.015 717 nT/s和-0.016 583 nT/s。通过计算后平均每个采样点在分量x 、分量y 、分量z 和总场的磁场梯度分别为-0.004 694 nT、0.000 168 nT、-0.015 717 nT和-0.016 583 nT。传统总场方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有1 000组数据,利用前500组数据进行补偿系数求解,后500组数据验证补偿效果,补偿结果如图2 所示。本文方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有550组数据。由于本文方法是在线补偿,平均50组数据更新一次补偿系数。其中前50组数据用于求解补偿系数,后50组数据验证补偿效果,补偿结果如图3 所示。表1 表示4种情况补偿结果的标准差。综上可得,本文方法对比传统总场方法可以有效降低地磁梯度误差带来的影响,提高了补偿精度。
图2
图2
地磁梯度对传统总场方法补偿结果的影响
Fig.2
Influence of geomagnetic gradient on the compensation result of traditional total field method
图3
图3
地磁梯度对本文方法补偿结果的影响
Fig.3
Influence of geomagnetic gradient on the compensation results of this method
由于地磁梯度是线性变化,传统总场方法的补偿结果也呈现线性变化的趋势,且随着测试时间越长,补偿结果越差。
由于本文方法是在线补偿,平均每50个样本点更新一次补偿系数,短时间内地磁梯度变化很小,以此来减小了地磁梯度的影响,且补偿结果始终稳定在一定范围内。
在不考虑地磁梯度的情况下,本文方法和传统总场方法补偿精度差别不大,但是考虑地磁梯度的影响后,传统总场方法比较本文方法的补偿精度误差较大。
3.3 传统总场方法的病态性问题
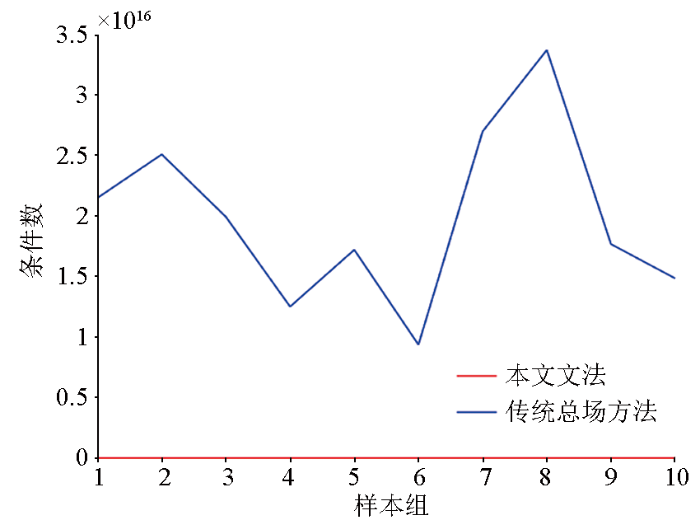
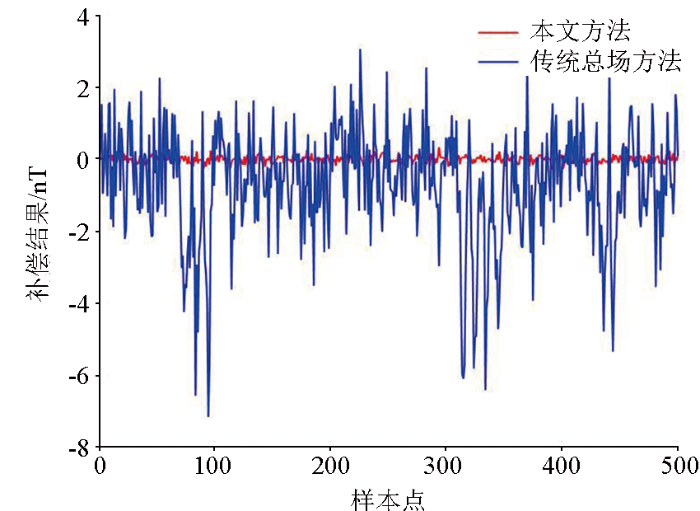
针对传统总场方法存在病态性的问题,补偿效果较差。为此,与本文方法进行对比仿真。常用的病态性判断方法包括特征分析法、条件数、方差膨胀因子法。条件数的判断指标是如果条件数小于100,则设计阵列向量的病态性较弱;如果条件数大于100,则设计阵列向量的病态性较强;如果条件数大于1 000,则计阵列向量的病态性很严重[20 ] 。本次仿真试验通过条件数来评估数据矩阵的病态性。仿真条件如3.1小节所描述, 分别有550组数据,前50组数据用于求解补偿系数和条件数为一样本组,后50组数据验证补偿效果。图4 是本文方法和传统总场方法的条件数变化情况,图5 给出了两者的补偿结果。分别计算补偿结果的标准差和条件数的平均值,如表2 所示。综上可得,与传统总场方法相比,本文方法极大地改善了传统总场方法求解系数时的病态性问题,从而提高了补偿精度。
图4
图4
本文方法与传统模型条件数对比仿真
Fig.4
Comparison and simulation of the condition number between the method in this paper and the traditional model
图5
图5
本文方法与传统模型补偿结果对比仿真
Fig.5
Comparison and simulation of the compensation results between the method in this paper and the traditional model
由于传统总场方法存在病态性问题,其条件数远大于1 000,相比本文方法的条件数不到100。
由图4 可知,由于传统总场方法存在病态性问题,求解的补偿系数误差较大,导致补偿结果较差。
在不考虑地磁梯度的情况下,传统总场方法表1 和表2 补偿结果的标准差差别较大,是因为仿真3.2小节求解补偿系数的数据为500组,3.3小节每次只有50组。为了验证是否因为数据量过大,导致3.2小节的补偿结果出现过拟合的情况,补偿系数不具有泛化能力。将3.2小节传统总场方法和本文方法求解的补偿系数分别对另一机动校准圈数据中500组数据进行补偿,得到传统总场方法标准差为0.772 1 nT,本文方法为0.011 9 nT。其中传统总场方法和本文方法x 分量求解的补偿系数如表3 、表4 所示,对比可以看出传统总场方法的误差较大,该方法求解的系数并不具有泛化能力。
3.4 磁场三分量与姿态角求方向余弦方法的补偿结果对比仿真
针对磁场三分量求方向余弦方法存在干扰误差的问题,为此,与姿态角求方向余弦方法的补偿结果进行对比仿真。本次仿真试验条件如3.1小节所描述,由于三分量求方向余弦方法的误差来源于载体干扰,则三分量分别有恒定场和感应场干扰在各分量上投影的误差。试验数据共有550组,前50组数据求解补偿系数,后50组数据验证补偿效果。
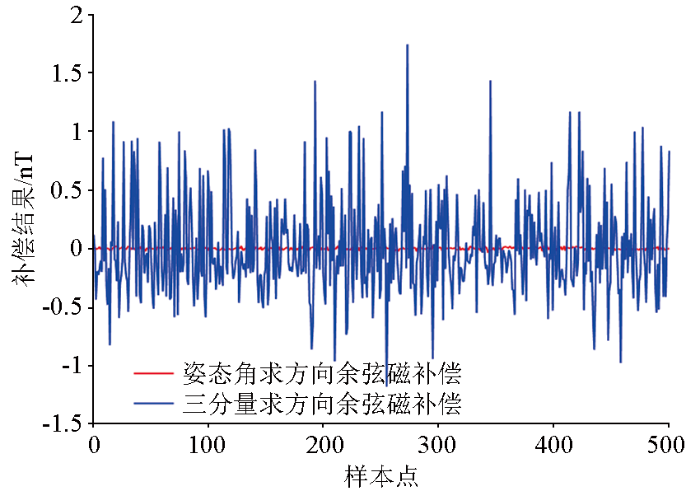
图6 给出了姿态角、三分量求方向余弦的补偿结果,对其求标准差如表5 所示。综上可得,与三分量求方向余弦方法相比,姿态角求方向余弦方法可以有效提高补偿精度。
图6
图6
姿态角与三分量求解方向余弦补偿效果仿真对比
Fig.6
Simulation comparison of attitude angle and three-component solution direction cosine compensation effect
由于三分量求方向余弦方法的分量值受到载体干扰的影响存在误差,导致补偿结果较差。
3.5 野外实验
为了进一步验证本文方法的可行性,在野外进行了在线载体磁补偿实验。实验环境选取了周围无磁干扰的区域,利用光泵测得该区域的磁场总场值作为参照值,并按照前文的步骤进行实测飞行。将无人机设定为匀速直线飞行,速度为10 m/s,采样率为10 Hz,飞行时间为100 s,共采集到1 000组数据。选取数据集中连续的550组数据,550组数据中前50组数据用于求解补偿系数,对后50组数据进行补偿,图7 给出了两种方法的补偿结果。由图可知,实测飞行情况下本文方法确实可以有效求解出补偿系数,提高补偿精度。
图7
图7
实测飞行本文方法与传统模型补偿结果对比
Fig.7
Comparison of the measured flight method and the compensation results of the traditional model
4 基于HLS工具的在线载体补偿算法硬件验证
为了实现在线载体补偿,需要验证该算法在嵌入式硬件的实时性和补偿精度的有效性。现阶段,基于单片机和FPGA的硬件算法设计占据主流。与单片机相比,FPGA内部集成锁相环,可以把外部时钟倍频,核心频率甚至可以达到几百MHz。且FPGA内部程序可以并行运行,有处理更复杂功能的能力,比单片机运行速度更快。本文方法对速度和并行处理的要求很高,FPGA可以更好地满足其实时性的特点。由于Verilog语言属于硬件描述语言,在进行浮点数运算时,会造成精度的损失。而HLS工具则可以直接使用C、C++或 System C 来对 Xilinx 系列的 FPGA 进行编程,HLS工具在内部运算过程中可以对float、double等数据类型进行操作,有效提高运算结果的精度。HLS工具是为了尽快把新产品推向市场,数字系统的设计者通过“设计的重用”和“抽象层级的提升”这两个方面来减少设计开发的周期。通过提高抽象的层级,大大减少了使用传统 RTL 描述进行 FPGA 开发所需的时间。
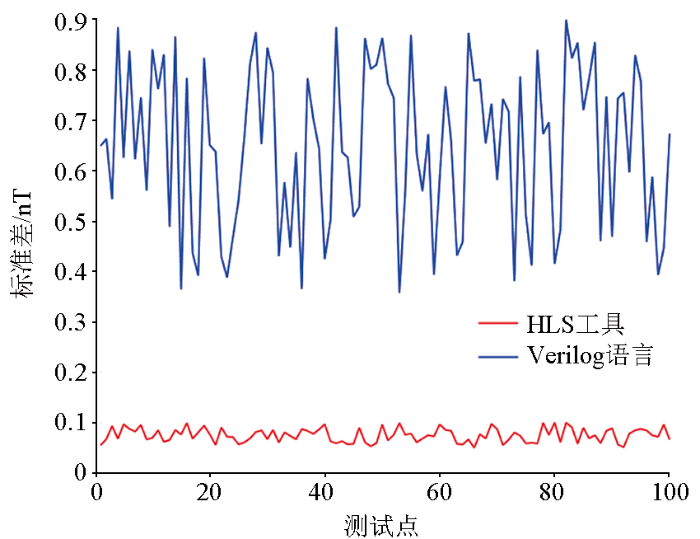
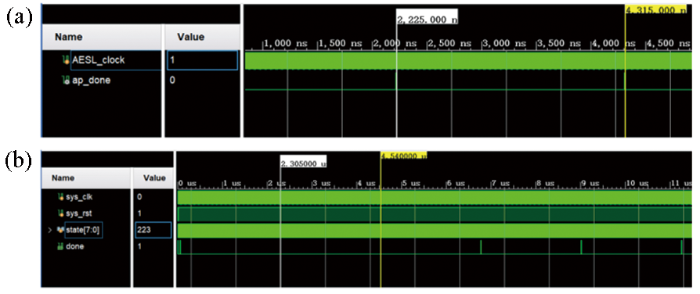
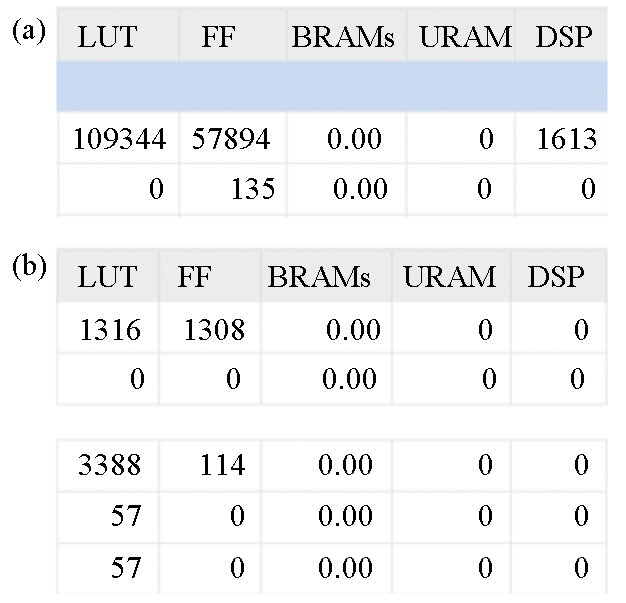
本文研究了在HLS工具中实现载体补偿系数的求解,仿真验证在线载体补偿,并通过HLS工具与Verilog语言进行仿真对比。本次以求解x 分量的4项系数进行仿真试验,选用了Xilinx公司kintex7l系列的xc7k480tlffv901-2l FPGA芯片。试验共有5 000组数据,包含姿态角数据和磁场分量数据,每次选取4组数据分别作为HLS工具和Verilog语言的输入信号,将求解出的系数补偿后面50组数据。两者的补偿结果的标准差如图8 所示,分别对100个测试点的标准差求平均值。对比两者消耗的时间、资源情况,如图9 、图10 所示。综上可得,HLS工具比较Verilog语言有效提高了补偿精度,所需要的资源也更多,两者在时间消耗上相差不多,本次选用的芯片可以满足其资源和时间方面的要求。
图8
图8
HLS工具与Verilog语言标准差对比
Fig.8
Comparison of standard deviation between HLS tool and Verilog language
图9
图9
HLS工具(a)与Verilog语言(b)时间消耗对比
Fig.9
Time consumption comparison of the HLS tool (a) and the Verilog language (b)
图10
图10
HLS工具(a)与Verilog语言(b)消耗资源对比
Fig.10
Resource consumption comparison of the HLS tool (a) and the Verilog language (b)
由图可知,比较Verilog语言,HLS工具的补偿效果更为稳定、精确。
图中HLS工具消耗的时间为2 090 ns,Verilog语言则是2 235 ns。
图中分别是HLS工具、Verilog语言消耗的资源情况,主要是LUT(查找表)和FF(触发器)资源的消耗,HLS工具还有DSP(数字信号处理)资源的消耗。
由表6 可知,HLS工具与Verilog语言相比,由于运算过程中涉及了大量浮点数、乘除操作,极大地消耗了资源,也因此提高了运算结果的精度,有效提高了补偿精度。
5 结论
本文讨论了传统T-L模型的磁干扰问题,在此基础上分析了载体磁场干扰的特性,对传统模型进行了简化,提出了基于矢量测量的在线载体磁补偿方法。通过相关仿真试验验证了本文方法的在线载体补偿可以有效降低地磁梯度的影响;本文方法改善了传统总场方法的病态性严重的问题,提高了补偿效果;姿态角相对于三分量求方向余弦方法的补偿效果更好。最后利用HLS工具在硬件系统仿真实时性地更新载体补偿系数,验证了在线载体磁补偿,且相对于Verilog语言,其硬件算法精度更高。
致谢
感谢我的老师庄志洪、王宏波,师兄金煌煌还有同期董笙雅的帮助。
参考文献
View Option
[1]
张昌达 . 关于磁异常探测的若干问题
[J]. 工程地球物理学报 , 2007 , 4 (6 ),549 -553 .
[本文引用: 1]
Zhang C D Several issues on the detection of magnetic anomalies
[J]. Journal of Engineering Geophysics , 2007 , 4 (6 ),549 -553 .
[本文引用: 1]
[2]
Reeves C V Aeromagnetic surveys principles,practices & interpretation
[M]. Washington:GEOSOFT , 2005 :31 -32 .
[本文引用: 1]
[3]
Xiong S Q Tong J Ding Y Y et al. Aeromagnetic data and geological structure of continental China:A review
[J]. Applied Geophysics , 2017 , 13 (2 ):227 -237 .
DOI:10.1007/s11770-016-0552-2
URL
[本文引用: 1]
[4]
朱学军 . 无人机航磁测量中载体干扰磁场补偿方法研究 [D]. 长沙 : 国防科学技术大学 , 2014 .
[本文引用: 1]
Zhu X J Research on compensation method of carrier interference magnetic field in field in UAV aeromagnetic survey [D]. Changsha : National University of Defense Technology , 2014 .
[本文引用: 1]
[5]
张光 , 张英堂 , 尹刚 , 等 . 一种磁张量探测系统载体的磁张量补偿方法
[J]. 地球物理学报 , 2016 , 59 (1 ):311 -317 .
[本文引用: 1]
Zhang G Zhang Y T Yi G et al. Magnetic tensor compensation method for magnetic tensor detection system carrier
[J]. Acta Geophysics , 2016 , 59 (1 ):311 -317 .
[本文引用: 1]
[6]
Tolles W E Compensation of induced magnetic fields in MAD equipped aircraft
[R]. Airborne Instruments Lab,OSRD , 1943 .
[本文引用: 1]
[7]
Tolles W E Lawson J D Magnetic compensation of MAD equipped aircraft
[R]. Airborne Instruments Lab.Inc. , 1950 .
[本文引用: 1]
[8]
韩磊 . 航空磁异常探测关键技术研究 [D]. 哈尔滨 : 哈尔滨工业大学 , 2014 .
[本文引用: 1]
Han L Research on key technologies of aeromagnetic anomaly detection [D]. Harbin : Harbin Institute of Technology , 2014 .
[本文引用: 1]
[9]
谭斌 , 林春生 , 张宁 , 等 . 地磁场梯度对飞机磁场求解精度的影响分析
[J]. 武汉大学学报:信息科学版 , 2011 , 36 (12 ):1482 -1485 .
[本文引用: 1]
Tan B Lin C S Zhang N et al. Analysis of the influence of geomagnetic field gradient on the accuracy of aircraft magnetic field solution
[J]. Journal of Wuhan University :Information Science Edition , 2011 , 36 (12 ):1482 -1485 .
[本文引用: 1]
[10]
何敬礼 . 飞机磁场的自动补偿方法
[J]. 物探与化探 , 1985 , 9 (6 ):464 -469 .
[本文引用: 2]
He J L Automatic compensation method of aircraft magnetic field
[J]. Geophysical and Geochemical Exploration , 1985 , 9 (6 ):464 -469 .
[本文引用: 2]
[11]
Williams P M Aeromagnetic compensation using neural networks
[J]. Neural Computing & pplications , 1993 (1 ):207 -214 .
[本文引用: 2]
[12]
边刚 , 刘雁春 , 卞光浪 , 等 . 海洋磁力测量中多站地磁日变改正值计算方法研究
[J]. 地球物理学报 , 2009 , 52 (10 ):2613 -2618 .
[本文引用: 1]
Bian G Liu Y C Bian G L et al. Research on calculation method of multi-station geomagnetic diurnal correction value in marine magnetometric survey
[J]. Acta Geophysics , 2009 , 52 (10 ):2613 -2618 .
[本文引用: 1]
[13]
Hardwick C D Techniques for achieving stableand aeromagnetic compensation coefficients
[C]// 1986 SEG Annual Meeting . Houston,Texas : Society of Exploration Geophysicists , 1986 :140 -141 .
[本文引用: 1]
[14]
Leach B W Aeromagnetic compensation as a linear regression problem
[J]. Information Linkage Between Applied Mathematics and Industry , 1980 , 2 (2 ):139 -161 .
[本文引用: 2]
[15]
伍东凌 , 陈正想 , 王秀 . 基于遗传算法的磁干扰补偿方法
[J]. 探测与控制学报 , 2012 , 34 (6 ):16 -20 .
[本文引用: 1]
Wu D L Cheng Z X Wang X Magnetic interference compensation method based on genetic algorithm
[J]. Journal of Detection and Control , 2012 , 34 (6 ):16 -20 .
[本文引用: 1]
[16]
潘雪 , 张琦 , 潘孟春 , 等 . 一种考虑地磁梯度变化的航磁补偿方法
[J]. 传感器与微系统 , 2020 , 39 (10 ):5 -7 ,10.
[本文引用: 1]
Pan X Zhang Q Pan M C et al. An aeromagnetic compensation method considering geomagnetic gradient changes
[J]. Sensors and Microsystems , 2020 , 39 (10 ):5 -7 ,10.
[本文引用: 1]
[17]
赵塔 . 海域环境下铁磁性载体地磁场矢量差分检测方法研究 [D]. 长春 : 吉林大学 , 2016 .
[本文引用: 1]
Zhao T Research on vector difference detection method of ferromagnetic carrier geomagnetic field in marine environment [D]. Changchun : Jilin University , 2016 .
[本文引用: 1]
[18]
高全明 . 固定翼无人机航磁三分量系统误差校正与干扰补偿技术研究 [D]. 长春 : 吉林大学 , 2020 .
[本文引用: 1]
Gao Q M Research on error correction and interference compensation technology of fixed-g UAV aeromagnetic three-component system [D]. Changchun : Jilin University , 2020 .
[本文引用: 1]
[19]
冯彦 , 蒋勇 , 孙涵 , 等 . 地磁场水平梯度及高空地磁场的计算与分析
[J]. 地球物理学进展 , 2013 , 28 (2 ):735 -746 .
[本文引用: 3]
Fen Y Jiang Y Sun H et al. Calculation and analysis of horizontal gradient of geomagnetic field and high-altitude geomagnetic field
[J]. Advances in Geophysics , 2013 , 28 (2 ):735 -746 .
[本文引用: 3]
[20]
张永军 , 吴磊 , 林立文 , 等 . 摄影测量中病态问题的条数指标分析
[J]. 武汉大学学报:信息科学版 , 2010 , 35 (3 ):308 -312 .
[本文引用: 2]
Zhang Y J Wu L Lin L W et al. Analysis of number index of pathological problems in photogrammetry
[J]. Journal of Wuhan University:Information Science Edition , 2010 , 35 (3 ):308 -312 .
[本文引用: 2]
[21]
Moulin M Goudon J C Marsy J M et al. Process for compensating the magnetic disturbances in the determination of a magnetic heading,and devices for carrying out this process:US, US4414753 A [P].
[本文引用: 1]
关于磁异常探测的若干问题
1
2007
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
关于磁异常探测的若干问题
1
2007
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
Aeromagnetic surveys principles,practices & interpretation
1
2005
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
Aeromagnetic data and geological structure of continental China:A review
1
2017
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
1
2014
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
1
2014
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
一种磁张量探测系统载体的磁张量补偿方法
1
2016
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
一种磁张量探测系统载体的磁张量补偿方法
1
2016
... 磁异常探测是通过相关磁信号检测设备对引起异常的磁性目标进行探测和定位[1 ] ,其中应用较为广泛的航空磁探测技术是通过安装在飞机上的磁探测装置来勘探磁场强度,从而寻找与磁性相关的物质.二战初期该技术首次在军事领域发挥作用[2 ] ,后来逐步应用于勘探矿产资源、研究基础地质[3 ] 等方面.在航磁测量过程中,为了提高测量磁场数据的质量,需要提高磁传感器和干扰补偿的水平[4 ] .航磁测量时,由于机动载体多由钢铁等磁性物质组成,铁磁性物质被地球磁场磁化后具有磁性,对磁探测造成一定的影响.载体的磁干扰主要包括硬磁材料的固有磁场和软磁材料产生的感应磁场以及由穿过载体的磁通量变化率产生的涡流磁场,并且感应磁场的大小和方向会随着载体的位置、姿态的变化而变化[5 ] .载体干扰是无法避免的误差因素,干扰磁场的存在导致磁场测量值存在较大误差,从而不能正确地对探测地域做出正确的磁异常评估,降低了测量效率,所以载体磁补偿技术是磁异常探测领域的关键技术之一. ...
Compensation of induced magnetic fields in MAD equipped aircraft
1
1943
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
Magnetic compensation of MAD equipped aircraft
1
1950
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
1
2014
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
1
2014
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
地磁场梯度对飞机磁场求解精度的影响分析
1
2011
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
地磁场梯度对飞机磁场求解精度的影响分析
1
2011
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
飞机磁场的自动补偿方法
2
1985
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
... 为了验证本文提出的基于矢量测量的在线载体磁补偿优化方法,将本文方法、传统总场方法分别在考虑地磁梯度和不考虑地磁梯度的情况下进行对比仿真;本文方法、传统总场方法的病态性问题对比仿真;本文方法对于三分量、姿态角求方向余弦的补偿结果对比仿真.对于补偿结果的优劣有3种补偿指标[10 ] : ...
飞机磁场的自动补偿方法
2
1985
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
... 为了验证本文提出的基于矢量测量的在线载体磁补偿优化方法,将本文方法、传统总场方法分别在考虑地磁梯度和不考虑地磁梯度的情况下进行对比仿真;本文方法、传统总场方法的病态性问题对比仿真;本文方法对于三分量、姿态角求方向余弦的补偿结果对比仿真.对于补偿结果的优劣有3种补偿指标[10 ] : ...
Aeromagnetic compensation using neural networks
2
1993
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
... [11 -12 ],该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
海洋磁力测量中多站地磁日变改正值计算方法研究
1
2009
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
海洋磁力测量中多站地磁日变改正值计算方法研究
1
2009
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
Techniques for achieving stableand aeromagnetic compensation coefficients
1
1986
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
Aeromagnetic compensation as a linear regression problem
2
1980
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
... 针对传统的载体补偿均是基于总场测量的18项补偿系数模型,求解系数存在病态性问题,本文提出了基于矢量测量的在线载体补偿优化模型.文献[14 ]研究发现恒定场和感应场是由在载体上的铁磁性物质所引起的,相较于涡流场,它们的强度大得多.载体外1 m处的涡流磁场强度最大值不足地磁场的0.04%[17 ] ,且通过对飞机载体进行无磁化改装,利用无磁性材料替换机体中大面积块状金属导电材料削弱涡流磁场,可有效规避涡流磁场干扰[18 ] .此外,在进行在线载体磁补偿过程中,若载体保持近似匀速直线运动,这样穿过载体的磁通变化率减小,进一步降低了涡流场的影响,同时也简化了补偿飞行时的机动方式,此时载体磁补偿模型简化为: ...
基于遗传算法的磁干扰补偿方法
1
2012
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
基于遗传算法的磁干扰补偿方法
1
2012
... 1950年Tolles和Lawson通过分析得出飞机载体平台的磁干扰与载体的运动有关,并且将干扰表示成恒定场、感应场以及涡流场3种场强之和,并建立相关的数学模型——T-L模型[6 -7 ] ,用于计算载体干扰,实现载体补偿.影响载体补偿效果的不只是载体自身的干扰,在实际长时间、长距离的高精度飞行探测过程中,由于地磁梯度的存在,地磁场是随位置变化的,且其变化没有显著的规律性.地磁梯度不仅会影响感应场、涡流场的计算和补偿,也会直接作为一种动态信号叠加到总场信号中[8 ] 对载体补偿精度产生影响.文献[9 ]采用改善比[10 ] (补偿前后信号的标准差之比)的方式,分别对考虑地磁梯度影响和不考虑地磁梯度影响的补偿效果进行评估,计算得到考虑地磁场梯度时的改善比为13.536 5,不考虑地磁场梯度时的改善比为8.761 5,地磁梯度引起的磁场计算误差使改善比降低了35.3%,可见地磁梯度对载体补偿精度的影响较大.但是该方法仅适用于飞机载体在0°、90°、180°、270°这4个特定航向上进行小幅度机动飞行.此外,磁日变[11 ] 是受到太阳活动的影响,地磁矢量场的强度和方向随着时间会呈现出一种没有规律性的连续变化.Williams提出用神经网络增加时间序列作为网络输入节点以实现对地磁场日变项的拟合[11 -12 ] ,该方法只能实现在特定时间内的高精度补偿,而不具备长时间探测过程中的参数泛化能力.由于本文方法是基于实时性的在线载体补偿,可以有效降低该影响.近年来国内外许多学者对载体补偿求解系数存在病态性问题和地磁梯度对补偿精度的影响进行了研究,文献[13 ]提出了一种基于岭回归的方法求解补偿系数,克服了变量之间的共线性,但是岭参数的数值不好选取;文献[14 ]研究了影响磁干扰补偿精度的各种因素,并分析了地磁场垂直梯度对磁干扰补偿精度的影响,却忽略了地磁场水平梯度的影响;文献[15 ]利用遗传算法来实现补偿系数的求解,但是存在计算效率相对较低的问题. ...
一种考虑地磁梯度变化的航磁补偿方法
1
2020
... 根据T-L载体补偿模型,恒定场相对于载体是静止不变的磁场;感应场是由载体自身的软磁性材料磁化所形成的磁场;涡流场由穿过载体的磁通量变化率所产生 [16 ] .由恒定场、感应场及涡流场磁场矢量叠加形成了飞机载体平台的磁干扰,如式(1)所示. ...
一种考虑地磁梯度变化的航磁补偿方法
1
2020
... 根据T-L载体补偿模型,恒定场相对于载体是静止不变的磁场;感应场是由载体自身的软磁性材料磁化所形成的磁场;涡流场由穿过载体的磁通量变化率所产生 [16 ] .由恒定场、感应场及涡流场磁场矢量叠加形成了飞机载体平台的磁干扰,如式(1)所示. ...
1
2016
... 针对传统的载体补偿均是基于总场测量的18项补偿系数模型,求解系数存在病态性问题,本文提出了基于矢量测量的在线载体补偿优化模型.文献[14 ]研究发现恒定场和感应场是由在载体上的铁磁性物质所引起的,相较于涡流场,它们的强度大得多.载体外1 m处的涡流磁场强度最大值不足地磁场的0.04%[17 ] ,且通过对飞机载体进行无磁化改装,利用无磁性材料替换机体中大面积块状金属导电材料削弱涡流磁场,可有效规避涡流磁场干扰[18 ] .此外,在进行在线载体磁补偿过程中,若载体保持近似匀速直线运动,这样穿过载体的磁通变化率减小,进一步降低了涡流场的影响,同时也简化了补偿飞行时的机动方式,此时载体磁补偿模型简化为: ...
1
2016
... 针对传统的载体补偿均是基于总场测量的18项补偿系数模型,求解系数存在病态性问题,本文提出了基于矢量测量的在线载体补偿优化模型.文献[14 ]研究发现恒定场和感应场是由在载体上的铁磁性物质所引起的,相较于涡流场,它们的强度大得多.载体外1 m处的涡流磁场强度最大值不足地磁场的0.04%[17 ] ,且通过对飞机载体进行无磁化改装,利用无磁性材料替换机体中大面积块状金属导电材料削弱涡流磁场,可有效规避涡流磁场干扰[18 ] .此外,在进行在线载体磁补偿过程中,若载体保持近似匀速直线运动,这样穿过载体的磁通变化率减小,进一步降低了涡流场的影响,同时也简化了补偿飞行时的机动方式,此时载体磁补偿模型简化为: ...
1
2020
... 针对传统的载体补偿均是基于总场测量的18项补偿系数模型,求解系数存在病态性问题,本文提出了基于矢量测量的在线载体补偿优化模型.文献[14 ]研究发现恒定场和感应场是由在载体上的铁磁性物质所引起的,相较于涡流场,它们的强度大得多.载体外1 m处的涡流磁场强度最大值不足地磁场的0.04%[17 ] ,且通过对飞机载体进行无磁化改装,利用无磁性材料替换机体中大面积块状金属导电材料削弱涡流磁场,可有效规避涡流磁场干扰[18 ] .此外,在进行在线载体磁补偿过程中,若载体保持近似匀速直线运动,这样穿过载体的磁通变化率减小,进一步降低了涡流场的影响,同时也简化了补偿飞行时的机动方式,此时载体磁补偿模型简化为: ...
1
2020
... 针对传统的载体补偿均是基于总场测量的18项补偿系数模型,求解系数存在病态性问题,本文提出了基于矢量测量的在线载体补偿优化模型.文献[14 ]研究发现恒定场和感应场是由在载体上的铁磁性物质所引起的,相较于涡流场,它们的强度大得多.载体外1 m处的涡流磁场强度最大值不足地磁场的0.04%[17 ] ,且通过对飞机载体进行无磁化改装,利用无磁性材料替换机体中大面积块状金属导电材料削弱涡流磁场,可有效规避涡流磁场干扰[18 ] .此外,在进行在线载体磁补偿过程中,若载体保持近似匀速直线运动,这样穿过载体的磁通变化率减小,进一步降低了涡流场的影响,同时也简化了补偿飞行时的机动方式,此时载体磁补偿模型简化为: ...
地磁场水平梯度及高空地磁场的计算与分析
3
2013
... 其中: D → t D → 0 R [19 -20 ] . ...
... 为了验证地磁梯度对本文方法的影响,分别将本文方法和传统总场方法在不考虑地磁场梯度、考虑地磁场梯度(不考虑地磁梯度的仿真条件是地磁场值不变,考虑地磁梯度则是地磁场值随着位置改变)的情况下进行对比仿真试验.仿真试验除了满足3.1小节的试验条件外,还要设置地磁场的梯度变化.文献[19 ]研究发现在中国18°N~54°N和73°E~136°E地区范围内的0~10 km高空中,地磁场北向分量x 、东向分量y 、垂直分量z 和总场F 的磁场梯度近似呈线性变化,分别为-4.694 nT/km、0.168 nT/km、-15.717 nT/km和-16.583 nT/km.根据文献[19 ]的地磁场梯度、载体运动速度和采样率,通过计算得出在分量x 、分量y 、分量z 和总场的磁场变化率分别为-0.004 694 nT/s、0.000 168 nT/s、-0.015 717 nT/s和-0.016 583 nT/s.通过计算后平均每个采样点在分量x 、分量y 、分量z 和总场的磁场梯度分别为-0.004 694 nT、0.000 168 nT、-0.015 717 nT和-0.016 583 nT.传统总场方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有1 000组数据,利用前500组数据进行补偿系数求解,后500组数据验证补偿效果,补偿结果如图2 所示.本文方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有550组数据.由于本文方法是在线补偿,平均50组数据更新一次补偿系数.其中前50组数据用于求解补偿系数,后50组数据验证补偿效果,补偿结果如图3 所示.表1 表示4种情况补偿结果的标准差.综上可得,本文方法对比传统总场方法可以有效降低地磁梯度误差带来的影响,提高了补偿精度. ...
... 的磁场梯度近似呈线性变化,分别为-4.694 nT/km、0.168 nT/km、-15.717 nT/km和-16.583 nT/km.根据文献[19 ]的地磁场梯度、载体运动速度和采样率,通过计算得出在分量x 、分量y 、分量z 和总场的磁场变化率分别为-0.004 694 nT/s、0.000 168 nT/s、-0.015 717 nT/s和-0.016 583 nT/s.通过计算后平均每个采样点在分量x 、分量y 、分量z 和总场的磁场梯度分别为-0.004 694 nT、0.000 168 nT、-0.015 717 nT和-0.016 583 nT.传统总场方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有1 000组数据,利用前500组数据进行补偿系数求解,后500组数据验证补偿效果,补偿结果如图2 所示.本文方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有550组数据.由于本文方法是在线补偿,平均50组数据更新一次补偿系数.其中前50组数据用于求解补偿系数,后50组数据验证补偿效果,补偿结果如图3 所示.表1 表示4种情况补偿结果的标准差.综上可得,本文方法对比传统总场方法可以有效降低地磁梯度误差带来的影响,提高了补偿精度. ...
地磁场水平梯度及高空地磁场的计算与分析
3
2013
... 其中: D → t D → 0 R [19 -20 ] . ...
... 为了验证地磁梯度对本文方法的影响,分别将本文方法和传统总场方法在不考虑地磁场梯度、考虑地磁场梯度(不考虑地磁梯度的仿真条件是地磁场值不变,考虑地磁梯度则是地磁场值随着位置改变)的情况下进行对比仿真试验.仿真试验除了满足3.1小节的试验条件外,还要设置地磁场的梯度变化.文献[19 ]研究发现在中国18°N~54°N和73°E~136°E地区范围内的0~10 km高空中,地磁场北向分量x 、东向分量y 、垂直分量z 和总场F 的磁场梯度近似呈线性变化,分别为-4.694 nT/km、0.168 nT/km、-15.717 nT/km和-16.583 nT/km.根据文献[19 ]的地磁场梯度、载体运动速度和采样率,通过计算得出在分量x 、分量y 、分量z 和总场的磁场变化率分别为-0.004 694 nT/s、0.000 168 nT/s、-0.015 717 nT/s和-0.016 583 nT/s.通过计算后平均每个采样点在分量x 、分量y 、分量z 和总场的磁场梯度分别为-0.004 694 nT、0.000 168 nT、-0.015 717 nT和-0.016 583 nT.传统总场方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有1 000组数据,利用前500组数据进行补偿系数求解,后500组数据验证补偿效果,补偿结果如图2 所示.本文方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有550组数据.由于本文方法是在线补偿,平均50组数据更新一次补偿系数.其中前50组数据用于求解补偿系数,后50组数据验证补偿效果,补偿结果如图3 所示.表1 表示4种情况补偿结果的标准差.综上可得,本文方法对比传统总场方法可以有效降低地磁梯度误差带来的影响,提高了补偿精度. ...
... 的磁场梯度近似呈线性变化,分别为-4.694 nT/km、0.168 nT/km、-15.717 nT/km和-16.583 nT/km.根据文献[19 ]的地磁场梯度、载体运动速度和采样率,通过计算得出在分量x 、分量y 、分量z 和总场的磁场变化率分别为-0.004 694 nT/s、0.000 168 nT/s、-0.015 717 nT/s和-0.016 583 nT/s.通过计算后平均每个采样点在分量x 、分量y 、分量z 和总场的磁场梯度分别为-0.004 694 nT、0.000 168 nT、-0.015 717 nT和-0.016 583 nT.传统总场方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有1 000组数据,利用前500组数据进行补偿系数求解,后500组数据验证补偿效果,补偿结果如图2 所示.本文方法在考虑地磁梯度、不考虑地磁梯度的情况下分别有550组数据.由于本文方法是在线补偿,平均50组数据更新一次补偿系数.其中前50组数据用于求解补偿系数,后50组数据验证补偿效果,补偿结果如图3 所示.表1 表示4种情况补偿结果的标准差.综上可得,本文方法对比传统总场方法可以有效降低地磁梯度误差带来的影响,提高了补偿精度. ...
摄影测量中病态问题的条数指标分析
2
2010
... 其中: D → t D → 0 R [19 -20 ] . ...
... 针对传统总场方法存在病态性的问题,补偿效果较差.为此,与本文方法进行对比仿真.常用的病态性判断方法包括特征分析法、条件数、方差膨胀因子法.条件数的判断指标是如果条件数小于100,则设计阵列向量的病态性较弱;如果条件数大于100,则设计阵列向量的病态性较强;如果条件数大于1 000,则计阵列向量的病态性很严重[20 ] .本次仿真试验通过条件数来评估数据矩阵的病态性.仿真条件如3.1小节所描述, 分别有550组数据,前50组数据用于求解补偿系数和条件数为一样本组,后50组数据验证补偿效果.图4 是本文方法和传统总场方法的条件数变化情况,图5 给出了两者的补偿结果.分别计算补偿结果的标准差和条件数的平均值,如表2 所示.综上可得,与传统总场方法相比,本文方法极大地改善了传统总场方法求解系数时的病态性问题,从而提高了补偿精度. ...
摄影测量中病态问题的条数指标分析
2
2010
... 其中: D → t D → 0 R [19 -20 ] . ...
... 针对传统总场方法存在病态性的问题,补偿效果较差.为此,与本文方法进行对比仿真.常用的病态性判断方法包括特征分析法、条件数、方差膨胀因子法.条件数的判断指标是如果条件数小于100,则设计阵列向量的病态性较弱;如果条件数大于100,则设计阵列向量的病态性较强;如果条件数大于1 000,则计阵列向量的病态性很严重[20 ] .本次仿真试验通过条件数来评估数据矩阵的病态性.仿真条件如3.1小节所描述, 分别有550组数据,前50组数据用于求解补偿系数和条件数为一样本组,后50组数据验证补偿效果.图4 是本文方法和传统总场方法的条件数变化情况,图5 给出了两者的补偿结果.分别计算补偿结果的标准差和条件数的平均值,如表2 所示.综上可得,与传统总场方法相比,本文方法极大地改善了传统总场方法求解系数时的病态性问题,从而提高了补偿精度. ...
1
... 1)载体起飞前对载体进行静态磁校准.根据椭球假设理论[21 ] , 将载体与磁强计作为一个整体,以某一点为球心做覆盖球面的旋转运动,持续10 s时间,完成对磁强计误差的校准,用校准后的磁场数据获取初始的方向余弦向量; ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}