0 引言
磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息。随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段。目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息。航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要。磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] 。基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] 。最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] 。SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] 。国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] 。本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性。
1 模型建立与求解
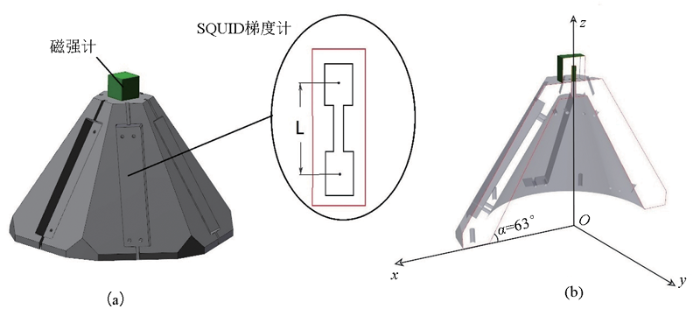
超导航磁梯度张量仪由6片SQUID磁梯度计和1个三轴矢量SQUID磁强计组成(图1 ),平面梯度计由间距为L 的2个线圈组成,安装在无磁杜瓦底部的六棱台斜面上,磁强计安装在六棱台顶面中心位置,如图1a 所示。以六棱台中轴与地面交点为圆心建立图1b 的坐标系,其中六棱台斜面与底面夹角α = 63 ° y 轴夹角β 0 ° 、 60 ° 、 120 ° 、 180 ° 、 240 ° 、 300 °
图1
图1
六棱台安装结构(a)及坐标系(b)(截面垂直于y 轴)
Fig.1
Installation structure(a) and coordinate system of hexagonal prism(b) (perpendicular to y axis)
设2个线圈测得的磁场分别为B 1 、B 2 ,对应该通道上磁梯度信号Gk 可以表示为:Gk =B 2 - B 1 L Gk 与张量分量之间的对应关系:
(1) G 1 G 2 G 3 G 4 G 5 G 6 = 0 0 0 4 2 1 1 1 1 1 1 1 1 - 1 1 1 - 1 1 0 0 0 4 - 2 1 1 1 - 1 1 - 1 1 1 - 1 - 1 1 1 1 3 s i n 2 α 8 B x x 3 s i n 2 α 4 B x y 3 2 B x z s i n 2 α 8 B y y 1 2 B y z s i n 2 α 2 B z z
磁梯度计受到采集系统干扰的来源分为磁异常干扰、不平衡度干扰和随机干扰,对3部分干扰分别建立数学模型。磁异常干扰又可分为3类,包括:剩余磁场、感应磁场和涡流磁场。对磁干扰建立磁矩模型,3种类型的干扰分别记为剩余磁矩Mr 、感应磁矩Mi 和涡流磁矩Mv 。因为剩余磁场相对稳定,短时间不会发生变化,直接用三分量表示Mr =(Mrx ,Mry ,Mrz )(单位:Am2 ),剩余磁矩的磁梯度为常量,这部分干扰为固定值,认为其在地面与飞行过程中均保持不变。
感应磁场和涡流磁场会受到飞机飞行的影响,将随着吊舱的姿态和背景磁场改变而发生变化,感应磁矩Mi 的分量在背景磁场下可以表示为以下形式[20 ] :
(2) M i x = k x H ~ e x M i y = k y H ~ e y M i z = k z H ~ e z
其中:k i = ( μ r - 1 ) V 1 + ( μ r - 1 ) N i ( i = x , y , z ) μ r N H ~ e i ( i = x , y , z ) N x = N y = N z = 1 3 N 均不同。本文选用椭球体等价源进行计算,因此当退磁系数确定时,感应磁矩与背景磁场成比例。
涡流磁场与感应磁场类似,其会受到吊舱的姿态以及背景磁场的变化影响,将涡流磁矩视为由均匀椭球内部产生,其内部磁场分量与涡流磁矩Mv 的关系可以表示如下[21 ] :
(3) M v j = e v j ∂ H ~ e j ∂ t , ( j = x , y , z )
其中:e v j = C μ j m j ( j = x , y , z ) μ x , μ y , μ z m x , m y , m z e v x , e v y , e v z
根据上述磁矩模型将式(2)、式(3)合并,得到综合磁矩模型。将干扰视为由点状磁偶极子源产生,已知磁矩矢量,张量分量可以通过格林函数积分得到,其积分表达式为:
(4) B i j ( r p ) = ∫ Ω Q G i j ( r p , r Q ) M ( r p ) d Ω Q
其中:G i j = ( G i j x , G i j y , G i j z ) 为 对 应 格 林 函 数 ( i , j = x , y , z ) M = ( M x , M y , M z ) T r p ( x , y , z ) r Q ( x , y , z ) Ω Q
除磁干扰以外的干扰还包括安装误差,设o l n
(5) G l m = s l G l r + o l + g 0 ( H e 2 , k p ) + g 1 ∂ H e 2 ∂ t , e p + n
其中:G l m G l r
(6) G l m = s l G l r + o l + g 0 ( H e 2 , k p ) + g 1 ∂ H e 2 ∂ t , e p + d x B x + d y B y + d z B z + n
其中:g 0 ( H e 2 , k p ) g 1 ∂ H e 2 ∂ t , e p s l , o l , k x , k y , k z , e x , e y , e z , d x , d y , d z
(7) G l r ( t k ) = c l B i j ( t k ) , ( l = 1 , … , 6 )
其中:B i j (t k) = C m A - i j k ( M r x , M r y , M r z , k x , k y , k z , e x , e y , e z ) T G l r = A x g 0 ( H e 2 , k p ) ( B x , B y , B z )
(8) L δ (y , f (x)) = 1 2 [ y - f ( x ) ] 2 , y - g ( x ) | ≤ δ δ | y - f ( x ) | - 1 2 δ 2 , o t h e r w i s e
对于方程中的异常点,使用L1损失函数更稳定,但它的导数不连续,因此求解效率较低,可能无法获得精确解;L2损失函数对异常点更敏感,通过令其导数为0,可以得到更稳定的封闭解,但会使更多的正常值向异常值偏离。可利用Huber范数拟合的方式来求解该方程组,该范数结合了L1和L2范数的优点,Huber损失(式(8))对数据中的异常点没有平方误差损失那么敏感,对异常点更加鲁棒,能够在求解过程中满足求解精度的同时充分保留异常点信息。方程组的解即为补偿系数,用于校正磁梯度测量数据。最后利用磁梯度数据与航磁梯度张量分量之间的关系即得到综合校正补偿后的航磁梯度张量分量。
2 模型验证及结果分析
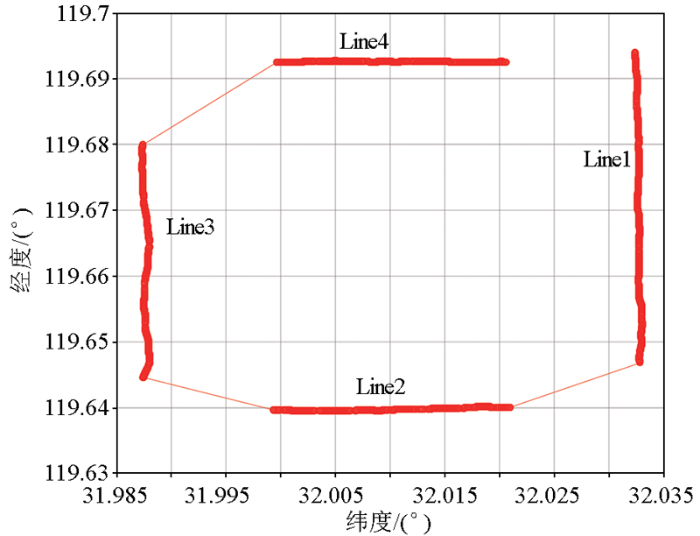
为了验证补偿模型的有效性,选取航磁梯度张量飞行实验数据进行补偿验证。试验地点为江苏省丹阳市,飞行数据包含2 000 m高度方形闭合框磁梯度数据,有效边长5 km,图2 给出了闭合框飞行轨迹。
图2
图2
闭合框有效部分
Fig.2
Effective part of closed line
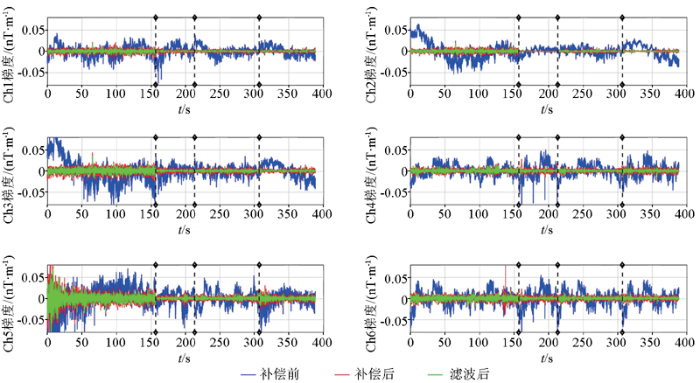
利用上述综合补偿模型,对测线数据进行补偿计算,图 3 给出了对应的补偿曲线,其中蓝色表示为原始磁梯度计测量信号,绿色为利用综合补偿模型补偿后的结果,红色为在综合补偿后结果基础上进行低通滤波处理后的结果,黑色虚线为4条测线的分割位置。图3 表明经过补偿后的数据其平稳性大大提高,峰峰值大幅降低,且有效压制了原始磁梯度数据中的“尖峰”和引起较大尺度波动的信息。
图3
图3
闭合框测线补偿结果对比
Fig.3
Comparison of compensation results of closed line
为了进一步评价数据的补偿效果,使用标准差σ c I R
(9) σ c = ∑ i = 1 N d i 0 - m e a n ( d 0 ) 2 / N
(10) I R = σ c 0 σ c
其中:d 0 N σ c 0 表1 给出了补偿效果统计结果。可以看出,补偿后的磁梯度数据闭合框4条测线标准差σ I R
3 结论
本文分析了超导航磁张量梯度数据的干扰来源,对不同来源的干扰建立了线性模型,得到了描述磁异常的磁矩模型。结合张量测量的原理、安装误差等误差因素,最终建立了综合补偿模型。为了验证综合补偿模型在实测数据中的有效性,利用实测数据进行补偿验证,实验结果表明对于实测数据,补偿后数据质量大幅提高,补偿效果明显。本文建立的综合补偿模型尽可能多的考虑了干扰因素,但在实际飞行过程中,仍然有其他的干扰,接下来的研究中仍需完善该模型,补充因飞行速度变化和高度变化等因素的校正项,进一步提高补偿的精度。
参考文献
View Option
[1]
Schmidt P W Clark D A The magnetic gradient tensor:Its properties and uses in source characterization
[J]. The Leading Edge , 2006 , 25 (1 ):75 -78 .
DOI:10.1190/1.2164759
URL
[本文引用: 1]
[2]
Chwala A Stolz R Zakosarenko V et al. Full tensor SQUID gradiometer for airborne exploration
[J]. ASEG Extended Abstracts , 2012 , 2012 (1 ):1 -4 .
[本文引用: 1]
[3]
Argast D FitzGerald D Holstein H et al. Compensation of the full magnetic tensor gradient signal
[J]. ASEG Extended Abstracts , 2010 , 2010 (1 ):1 -4 .
[本文引用: 1]
[4]
Leliak P Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft
[J]. IRE Transactions on Aerospace and Navigational Electronics , 1961 (3 ):95 -105 .
[本文引用: 1]
[5]
Bickel S H Small signal compensation of magnetic fields resulting from aircraft maneuvers
[J]. IEEE Transactions on aerospace and electronic systems , 1979 (4 ):518 -525 .
[本文引用: 1]
[6]
Bickel S H Error analysis of an algorithm for magnetic compensation of aircraft
[J]. IEEE Transactions on Aerospace and Electronic Systems , 1979 (5 ):620 -626 .
[本文引用: 1]
[7]
Groom R W Jia R Lo B Magnetic compensation of magnetic noises related to aircraft’s maneuvers in airborne survey
[C]// 17th EEGS Symposium on the Application of Geophysics to Engineering and Environmental Problems.European Association of Geoscientists & Engineers , 2004 .
[本文引用: 1]
[8]
刘首善 , 唐林牧 , 许庆丰 , 等 . 航磁补偿技术及补偿质量的评价方法
[J]. 海军航空工程学院学报 , 2016 , 31 (6 ):641 -647 .
[本文引用: 1]
Liu S S Tang L M Xu Q F et al. Investigation of aeromagnetic compensation technology and performance assessment method
[J]. Journal of Naval Aeronautical and Astronautical University , 2016 , 31 (6 ):641 -647 .
[本文引用: 1]
[9]
DZ/T 0142-2010,航空磁测技术规范 [S].
[本文引用: 1]
DZ/T 0142-2010,Criterion of aeromagnetic survey [S].
[本文引用: 1]
[10]
吴文福 , 袁皓 . 氦光泵磁力仪的应用与发展研究综述
[J]. 声学与电子工程 , 2016 (4 ):1 -5 ,9.
[本文引用: 1]
Wu W F Yuan H A review of the application and development of Helium Optically Pumped magnetometer
[J]. Acoustics and Electronics Engineering , 2016 (4 ):1 -5 ,9.
[本文引用: 1]
[11]
裴易峰 , 荣亮亮 , 张懿 , 等 . 低温SQUID瞬变电磁法中去除地磁场影响的方法研究
[J]. 地球物理学进展 , 2019 , 34 (2 ):622 -627 .
[本文引用: 1]
Pei Y F Rong L L Zhang Y et al. Removal of geomagnetic field in low-temperature SQUID TEM
[J]. Progress in Geophysics , 2019 , 34 (2 ):622 -627 .
[本文引用: 1]
[12]
Stolz R Zakosarenko V Schulz M et al. Magnetic full-tensor SQUID gradiometer system for geophysical applications
[J]. The Leading Edge , 2006 , 25 (2 ):178 -180 .
DOI:10.1190/1.2172308
URL
[本文引用: 1]
[13]
Schmidt P W Clark D A The magnetic gradient tensor:Its properties and uses in source characterization
[J]. The Leading Edge , 2006 , 25 (1 ):75 -78 .
DOI:10.1190/1.2164759
URL
[本文引用: 1]
[14]
Schmidt P W Clark D A The magnetic gradient tensor:Its properties and uses in source characterization
[J]. The Leading Edge , 2006 , 25 (1 ):75 -78 .
DOI:10.1190/1.2164759
URL
[本文引用: 1]
[15]
Groom R W Jia R Lo B Magnetic compensation of magnetic noises related to aircraft's maneuvers in airborne survey
[C]// Symposium on the Application of Geophysics to Engineering and Environmental Problems 2004,Society of Exploration Geophysicists , 2004 .
[本文引用: 1]
[16]
刘洋 , 荣亮亮 , 蒋坤 , 等 . 超导磁力仪射频屏蔽仿真与实验研究
[J]. 低温物理学报 , 2014 , 36 (2 ):136 -139 .
[本文引用: 1]
Liu Y Rong L L Jiang K et al. Simulation and experimental on shielding effect of radio friquency for superconducting megnetometer
[J]. Chinese Journal of Low Temperature Physics , 2014 , 36 (2 ):136 -139 .
[本文引用: 1]
[17]
常凯 , 伍俊 , 蒋坤 , 等 . 无人机平台航空超导磁测系统与室内测试
[J]. 低温物理学报 , 2015 , 37 (4 ):267 -270 .
[本文引用: 1]
Chang K Wu J Jiang K et al. Airborne geophysics squid magnetic probing magnetic probing system and indoor test
[J]. Chinese Journal of Low Temperature Physics , 2015 , 37 (4 ):267 -270 .
[本文引用: 1]
[18]
荣亮亮 , 包苏新 , 董丙元 , 等 . 基于低温SQUID瞬变电磁系统的涡流补偿方法
[J]. 传感技术学报 , 2019 , 32 (10 ):1483 -1486 .
[本文引用: 1]
Rong L L Bao S X Dong B Y et al. The method of eliminating eddy current from low-temperature SQUID based TEM system
[J]. Journal of Transduction Technology , 2019 , 32 (10 ):1483 -1486 .
[本文引用: 1]
[19]
周建军 , 林春生 , 谢静 . 一种分离铁磁体感应磁矩与剩余磁矩的测量方法
[J]. 武汉理工大学学报:交通科学与工程版 , 2014 , 38 (3 ):580 -584 .
[本文引用: 1]
Zhou J J Lin C S Xie J A method for separate inductive magnetic moment and residual magnetic moment of ferromagnet
[J]. Journal of Wuhan University of Technology:Transportation Science & Engineering , 2014 , 38 (3 ):580 -584 .
[本文引用: 1]
[20]
周建军 , 林春生 , 杨振宇 . 变化磁场作用下椭球体涡流磁矩的计算
[J]. 大学物理 , 2012 , 31 (11 ):43 -46 .
[本文引用: 1]
Zhou J J Lin C S Yang Z Y Calculation of ellipsoid eddy-current moment under varying magnetic field
[J]. College Physics , 2012 , 31 (11 ):43 -46 .
[本文引用: 1]
[21]
苗红松 . 航空磁通门全张量仪校正及磁补偿方法研究 [D]. 长春 : 吉林大学 , 2017 .
[本文引用: 1]
Miao H S Research on calibration and compensation method of airborne fluxgate magnetic tensor gradiometer [D]. Changchun : Jilin University , 2017 .
[本文引用: 1]
The magnetic gradient tensor:Its properties and uses in source characterization
1
2006
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Full tensor SQUID gradiometer for airborne exploration
1
2012
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Compensation of the full magnetic tensor gradient signal
1
2010
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft
1
1961
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Small signal compensation of magnetic fields resulting from aircraft maneuvers
1
1979
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Error analysis of an algorithm for magnetic compensation of aircraft
1
1979
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Magnetic compensation of magnetic noises related to aircraft’s maneuvers in airborne survey
1
2004
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
航磁补偿技术及补偿质量的评价方法
1
2016
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
航磁补偿技术及补偿质量的评价方法
1
2016
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
1
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
1
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
氦光泵磁力仪的应用与发展研究综述
1
2016
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
氦光泵磁力仪的应用与发展研究综述
1
2016
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
低温SQUID瞬变电磁法中去除地磁场影响的方法研究
1
2019
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
低温SQUID瞬变电磁法中去除地磁场影响的方法研究
1
2019
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Magnetic full-tensor SQUID gradiometer system for geophysical applications
1
2006
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
The magnetic gradient tensor:Its properties and uses in source characterization
1
2006
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
The magnetic gradient tensor:Its properties and uses in source characterization
1
2006
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
Magnetic compensation of magnetic noises related to aircraft's maneuvers in airborne survey
1
2004
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
超导磁力仪射频屏蔽仿真与实验研究
1
2014
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
超导磁力仪射频屏蔽仿真与实验研究
1
2014
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
无人机平台航空超导磁测系统与室内测试
1
2015
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
无人机平台航空超导磁测系统与室内测试
1
2015
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
基于低温SQUID瞬变电磁系统的涡流补偿方法
1
2019
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
基于低温SQUID瞬变电磁系统的涡流补偿方法
1
2019
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
一种分离铁磁体感应磁矩与剩余磁矩的测量方法
1
2014
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
一种分离铁磁体感应磁矩与剩余磁矩的测量方法
1
2014
... 磁法勘探中,磁总场测量理论与技术方法一直占据主导地位,航空、地面及海洋磁法勘探中大多测量地磁场总场强度或总场梯度的数据,但地磁场属于矢量场,总场属于标量场,无法表征矢量信息.随着传感器探测技术的进步,探测技术已经从单一标量场跨越到张量场测量阶段.目前可以通过超导量子干涉仪(SQUID)技术的重力和磁梯度仪器获得空间重力、磁力张量场信息.航磁梯度张量测量能够获得更加丰富的地下目标信息,对地、对海洋目标体的探测能力大幅提高[1 -2 ] ,但航空磁测中对测量精度影响最大的因素为外界的磁干扰,磁张量梯度计更是如此,因此磁补偿工作显得尤为重要.磁补偿工作最早起源于1944年Tolles和Lawson等对飞机平台的研究报告,到目前为止磁补偿方案已经非常成熟,补偿方案能够适用于质子磁力仪、光泵磁力仪、磁通门磁力仪等采集的数据[3 ⇓ ⇓ ⇓ -7 ] .基于超导量子干涉仪的组合式张量磁梯度测量平台的测量方式与传统的矢量测量不同,并且由安装误差引起的不平衡度,需要额外设置单独的三分量磁强计进行补偿,因此其补偿方案将有所不同,无法直接使用已有的磁补偿方案进行补偿[8 ⇓ ⇓ -11 ] .最早的航磁梯度张量测量报道为德国的Stolz团队,他们搭载SQUID张量磁梯度测量仪做了飞行测试实验,并给出了张量磁测数据采集框架[12 ] .SQUID采集到的数据虽然对地面异常源的出色识别能力,但其极易受到外界磁干扰的影响,且对于磁张量数据的补偿方案仍不完善,严重影响了SQUID航磁张量仪的测量精度[13 ⇓ ⇓ -16 ] .国内对于超导航磁全张量梯度测量系统的研究主要偏向于硬件系统的研制及磁补偿模型的应用仿真,并取得了良好的补偿效果,但补偿模型的仿真结果与实测数据的补偿效果往往存在差异,仿真模型仍然需要实测数据的检验[17 ⇓ -19 ] .本文基于全张量航磁梯度测量系统,分析了测量过程中的干扰来源,建立综合磁补偿模型并利用实测数据验证其有效性. ...
变化磁场作用下椭球体涡流磁矩的计算
1
2012
... 感应磁场和涡流磁场会受到飞机飞行的影响,将随着吊舱的姿态和背景磁场改变而发生变化,感应磁矩Mi 的分量在背景磁场下可以表示为以下形式[20 ] : ...
变化磁场作用下椭球体涡流磁矩的计算
1
2012
... 感应磁场和涡流磁场会受到飞机飞行的影响,将随着吊舱的姿态和背景磁场改变而发生变化,感应磁矩Mi 的分量在背景磁场下可以表示为以下形式[20 ] : ...
1
2017
... 涡流磁场与感应磁场类似,其会受到吊舱的姿态以及背景磁场的变化影响,将涡流磁矩视为由均匀椭球内部产生,其内部磁场分量与涡流磁矩Mv 的关系可以表示如下[21 ] : ...
1
2017
... 涡流磁场与感应磁场类似,其会受到吊舱的姿态以及背景磁场的变化影响,将涡流磁矩视为由均匀椭球内部产生,其内部磁场分量与涡流磁矩Mv 的关系可以表示如下[21 ] : ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}