An ISCCP algorithm for geomagnetic gradient matching for navigation
JIN Zi-Xiang1(), XU Su-Peng1, ZHANG Gui-Bin1(), LIANG Jian1, Dong Gen-Wang2, FAN Zhen-Yu1
1. School of Geophysics and Information Technology, China University of Geosciences(Beijing), Beijing 100083, China 2. Geophysical Exploration Academy of China Metallurgical Geology Bureau, Baoding 071051, China
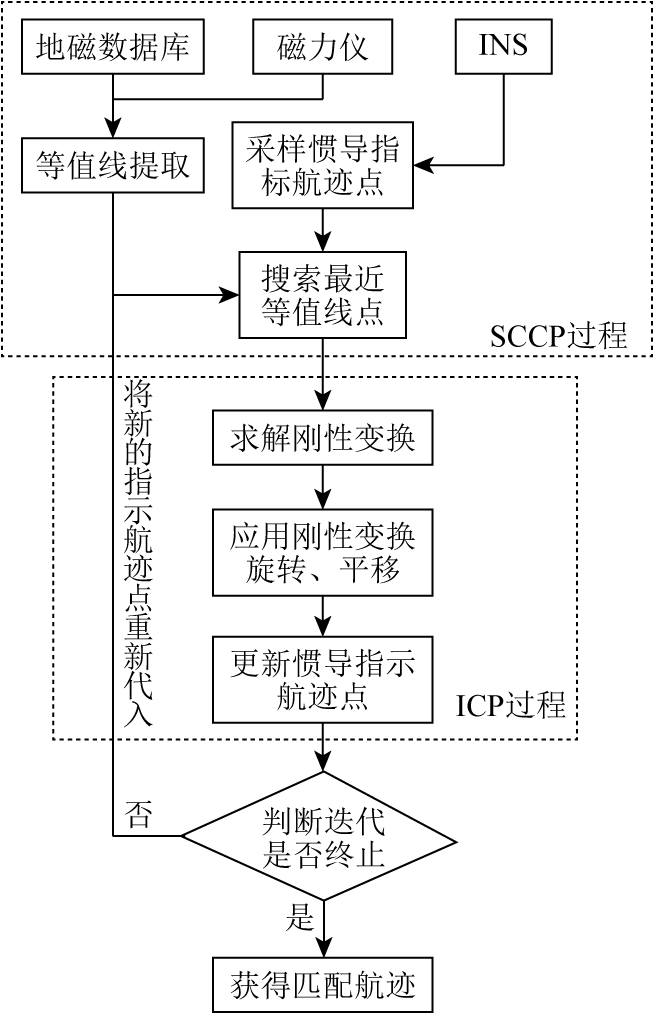
The iterated closest contour point (ICCP) algorithm results in large matching errors and even false matching in areas with small geomagnetic variations. Given this, this study established an error model for the ICCP algorithm in order to determine the causes of the large matching errors in the areas. Based on this model, this study proposed an iterated search closest contour point (ISCCP) algorithm suitable for geomagnetic gradient matching for navigation. In the proposed algorithm, the closest point search method was improved based on the ICCP, and an iterative search was performed using the geomagnetic gradient information of three orthogonal directions. The simulation results show that the average point error of the ISCCP algorithm can be controlled within half a grid length, with a precision about 15 times higher than that of the ICCP algorithm. Therefore, the ISCCP algorithm proposed in this study can effectively eliminate the large matching errors in areas with small geomagnetic variations caused by the ICCP algorithm.
Chen G X, Liu T Y, Feng J. Fine-scale passive magnetic navigation in consideration of the influence of geomagnetic diurnal change[J]. Geophysical and Geochemical Exploration, 34(5):590-594.
Wu F H, Zhang Q, Pan M C, et al. Research on geomagnetic vector matching algorithm based on ICCP[J]. China Test, 2018, 44(2):103-107.
[6]
Sun Y, Zhang J S, Qiao Y K, et al. Matching area intelligent selection method in geomagnetic navigation[C]// 2010 IEEE International Conference on Intelligent Computing and Intelligent Systems, 2010.
[7]
Xu Y, Guan G F, Song Q W, et al. Heuristic and random search algorithm in optimization of route planning for robot’s geomagnetic navigation[J]. Computer Communications, 2020, 154:12-17.
doi: 10.1016/j.comcom.2020.02.043
Xi Y Z, Lu N, Zhang L, et al. Integration and application of an aeromagnetic survey system based on unmanned helicopter platform[J]. Geophysical and Geochemical Exploration, 2019, 43(1):125-131.
Liang J, Zhuang D Z, Guo Y F, et al. Elimination of steering difference in aeromagnetic gradient measurement using internal accord accuracy for test repeat line in aeromagnetic survey[J]. Geophysical and Geochemical Exploration, 2018, 42(3): 576-582.
[10]
Song Z G, Zhang J S, Zhu W Q, et al. The vector matching method in geomagnetic aiding navigation[J]. Sensors, 2016, 16(7):1120.
doi: 10.3390/s16071120
[11]
Chen Z, Zhang Q, Pan M C, et al. A new geomagnetic matching navigation method based on multidimensional vector elements of Earth’s magnetic field[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(8):1289-1293.
doi: 10.1109/LGRS.2018.2836465
Wang Q, Wang X Y, Su W B. Geomagnetic matching method based on genetic algorithm in areas with smooth magnetic features[J]. Modern Navigation, 2020, 11(5):313-317,328.
Li X, Chen D F, Zhou Z J. A matching algorithm based on the gradient of the total geomagnetic[J]. Journal of Transduction Technology, 2017, 30(12):1869-1875.
[14]
余志超. 基于多特征量的地磁匹配算法及应用[D]. 哈尔滨: 哈尔滨工业大学, 2019.
[14]
Yu Z C. Geomagnetic matching algorithm and application based on multi feature quantity[D]. Harbin:Harbin University of Technology, 2019.
Zhao J H, Zhang H M, Wang A X, et al. Underwater geomagnetic navigation based on ICCP[J]. Journal of Wuhan University: Information Science Edition, 2010, 35(3):261-264.
[16]
张晓峻. 水下机器人地磁辅助导航算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2016.
[16]
Zhang X J. Research on algorithms of geomagnetic aided navigation for remote operated vehicle[D]. Harbin:Harbin Engineering University, 2016.
Wang X L, Su M D, Liu P G, et al. Application of improved ICCP algorithm in gravity matching aided navigation[J]. Science of Surveying and Mapping, 2013, 38(1):36-39,50.
[18]
严恭敏, 翁浚. 捷联导航算法与组合导航原理[M]. 西安: 西北工业大学, 2019.
[18]
Yan G M, Weng J. Strapdown navigation algorithm and integrated navigation principle[M]. Xi'an: Northwestern Polytechnical University, 2019.