

0 引言
机载磁异常探测技术能够高效地获取区域地磁数据,并在科学、工业等领域中发挥着重要作用,例如水下目标探测、矿产资源勘探、地质勘探和地震预报等[1-
虽然拖曳式探测基本可以消除飞机本体磁干扰的影响,但拖曳吊舱内部的磁干扰仍会影响磁测精度。通过对拖曳吊舱材料进行控制,可以显著降低材料的磁干扰。但磁力仪的电子箱通常安装在吊舱内,在工作时,探头会受到电子箱内电子器件材料和电流的影响,产生几个纳特(nT)的磁干扰。尽管这些干扰量相对较小,但仍会影响磁测精度,尤其是在要求高精度的测量任务中。为了减小这种干扰的影响,通常采用TL模型进行磁干扰补偿[9]。TL模型的原理是建立干扰场与载体固有磁场、感应磁场和涡流磁场之间的线性关系。这些磁场量均与载体的姿态密切相关,对电磁干扰项的精确建模具有很大的挑战。有些研究通过假定电子器件电流为恒定直流,通过建立电流干扰的线性项来扩展TL模型[10-11]。但在实际系统中,可能存在多种电流值或交变电流(比如光源或气室的温控电流),使电磁干扰数据呈现复杂的结构。在这种情况下,基于线性回归的最小二乘法[12]、岭回归法[13]以及自适应滤波[14-15]等方法通常表现不稳定,且曲线拟合能力较差,从而影响磁补偿的质量。考虑到神经网络强大的非线性拟合能力,Williams[16]设计了3层神经网络用于航磁补偿,但网络层数和神经元个数较少导致其补偿效果有限。随着计算机硬件技术的发展,研究者增加神经元个数和网络的层数,并提出误差反向传播网络(BP网络)补偿磁干扰,但在参数更新过程中可能会出现梯度消失或过拟合的问题[17]。Yu等[18]提出残差反向传播网络(ResBP)来减缓该问题,但由于全连接网络结构的存在,仍然有过拟合的风险。
为了克服传统补偿方法的局限性,本文提出了一种深度残差磁补偿网络(MCRNet),用于吊舱磁干扰的补偿,利用磁异常探测系统地面试验数据训练模型,使其能够补偿复杂的磁干扰。与传统补偿方法作比较,该方法不仅提高了补偿的准确性,还增强了系统在实际应用中的稳定性和可靠性。
1 磁补偿模型
1.1 吊舱磁干扰建模
CPT原子磁力仪k时刻的输出可以表示为地磁场、转向差、干扰场之和:
TL线性模型中忽略了非线性电流效应的影响,并假设磁干扰场Bak由永久干扰磁场、感应干扰磁场、涡流干扰磁场3部分组成,并且3种干扰场均能够线性表示[21]。式(1)可扩展为:
式中:u=[cosα,cosβ,cosγ]T,表示地磁场方向余弦,α、β、γ分别表示地磁矢量方向与吊舱载体坐标系之间的夹角;u'表示方向余弦导数;xi(i=1,…,18)为未知参数。式(2)可进一步简化表示为:
式中:δk=[uT,vec(Bek·uuT)1×6,vec(Bek·uu'T)1×9],x=[x1,x2,…,x18]T。
式(3)的矩阵形式为:
式中:A=[
TL模型描述的干扰项与吊舱姿态密切相关,不足以表示吊舱内电子箱产生的非线性电磁干扰项,这些干扰项难以通过表达式直接计算。神经网络模型具有学习和预测复杂非线性关系的优势,通过大量数据的训练,可在实际测量过程中补偿非线性的磁干扰项,进而提高磁补偿的精度。考虑到CPT原子磁力仪探头与磁通门磁力仪探头均处于吊舱内,磁通门磁力仪测量数据中也包含电磁干扰项数据,运用该数据计算矩阵A作为神经网络的特征输入,既包含了TL模型的线性干扰特征,也包含了非线性电流磁干扰特征。因此,基于神经网络的磁干扰模型满足以下关系:
式中:f(A)可以表示任意非线性映射,需要从数据中学习获得。
1.2 MCRNet网络结构设计
通过在非线性卷积层中增加短接边,原始目标函数H(x)的优化被转换为残差函数F(x)的优化,这种优化方式更易于学习[23]。此外,如果F(x)输出的特征维度与x不一致,则需要通过等宽卷积层连接。
图1
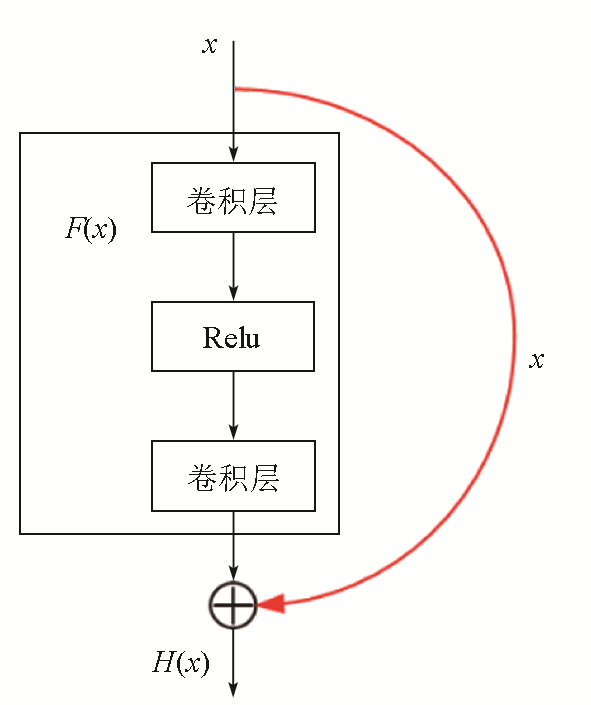
图2
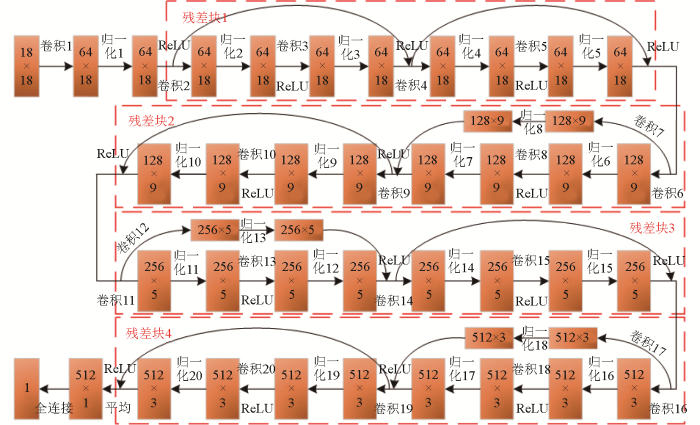
表1 MCRNet参数设置
Table 1
| 卷积层 | 卷积核尺寸 | 步长 | 填充 | 归一化层 | 特征 |
|---|---|---|---|---|---|
| 1、2、3、4、5、8、9、10、 13、14、15、18、19、20 | 3 | 1 | 1 | 1、2、3、4、5 | 64 |
| 6、11、16 | 3 | 2 | 1 | 6、7、8、9、10 | 128 |
| 7、12、17 | 1 | 2 | 0 | 11、12、13、14、15 | 256 |
| - | - | - | - | 16、17、18、19、20 | 512 |
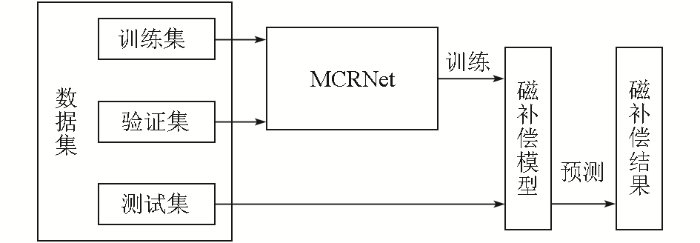
模型的训练和超参数调节是确保模型性能的关键步骤。整个模型训练与预测流程如图3所示。数据集被划分为训练集、验证集和测试集,这三者互不重叠。首先,训练集用于训练MCRNet网络模型。通过在训练集上的多次迭代,模型能够逐步学习数据的特征和模式。验证集在训练过程中发挥重要作用,它用于实时监测模型的误差,以便在模型过拟合或欠拟合时能及时调整超参数。超参数的调整可以显著影响模型的收敛速度和最终性能。最后,测试集用于评估经过训练的模型的实际性能。测试集中的数据在训练过程中未曾使用,因此可以客观地反映模型在处理新数据时的表现。通过在测试集上进行预测,可以检验模型在磁干扰补偿时的准确性和效果。通过上述方法和流程,可以不断优化MCRNet网络模型,使其在预测磁干扰方面达到更高的准确性和鲁棒性。
图3
2 拖曳式探测地面磁补偿试验
2.1 地面试验系统及组成
与捷联式探测方案相比,拖曳式探测飞机与磁力仪之间仅通过软绳连接,因此磁力仪的姿态变化较大,通常要求高精度标量磁力仪没有方向盲区,并且具备自主全向适应能力,以适应拖曳式探测中吊舱姿态的变化。传统的光泵磁力仪在原理上存在方向盲区,因此通常需要通过复杂的多探头组合设计和数据切换来解决这一问题[24]。尽管Overhauser磁力仪没有方向盲区,但其采样率低导致空间磁测分辨率较低[25],不适合应用于航空磁探。相较之下,CPT原子磁力仪是一款高精度、无方向盲区的标量原子磁力仪[26]。通过优化控制算法,CPT磁力仪能够实现自主全向适应,即磁场方向与探头光轴成任意角度下无需工作模式切换,探头都可进行磁场测量,并且其采样率可达50 Hz以上,特别适用于地磁场测量和航空航天等领域[27]。
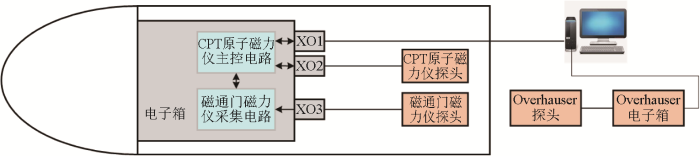
基于CPT原子磁力仪的拖曳式磁异常探测系统试验框架如图4所示。内部结构包括一个电子箱和两个磁力仪探头,整体精密布置以优化性能。磁通门磁力仪探头在y轴方向与CPT原子磁力仪探头光轴方向保持平行,可通过磁通门磁力仪输出数据得到CPT原子磁力仪探头光轴与磁场方向夹角信息。磁通门磁力仪通过XO3接口采集三轴磁场数据,并将这些数据传输到CPT原子磁力仪的主控电路。该主控电路通过XO2接口控制CPT原子磁力仪探头的信号和磁场数据采集。数据总包最终通过XO1接口输出至计算机进行处理和分析。图中Overhauser磁力仪电子箱和探头放置在吊舱外部,用于监测地磁场的长期变化,通过将CPT原子磁力仪的数据和Overhauser磁力仪的数据作差,可以获得不受地磁变化而影响的磁测数据。
图4
在地磁场环境下,所用CPT原子磁力仪的灵敏度达到8 pT/Hz1/2,非线性度为1.3 ppm,并具备自主全向适应能力。此外,磁通门磁力仪探头采用了Bartington公司的Mag690-FL100型号,正交误差小于0.5°。Overhauser磁力仪是加拿大GEM公司生产的GSM-19型号,该设备具有±0.1 nT的绝对精度,确保了地磁场测量数据的高准确度。
2.2 数据采集
为降低环境磁干扰对磁补偿精度的影响,选在野外空旷地区进行试验和数据采集,试验实景如图5所示。Overhauser电子箱与计算机连接,以便与磁异探测系统同步数据采集和处理。标准的航磁补偿通常是飞机采用FOM飞行模式采集数据并运用TL模型求解磁补偿系数,然后将系数用于其他飞行数据磁补偿。FOM飞行包括4个方向的机动,每个方向包括一组±5°偏航、±5°俯仰和±10°翻滚组合动作。由于拖曳式磁异探测系统实际作业时空中姿态不可控,通过地面试验的方式,采取人工驱动的俯仰、偏航和翻滚动作来模拟吊舱在空中的运动。分段多次采集数据,以保证每次地磁场以及吊舱运动的姿态不同,从而丰富数据集的信息量。
图5
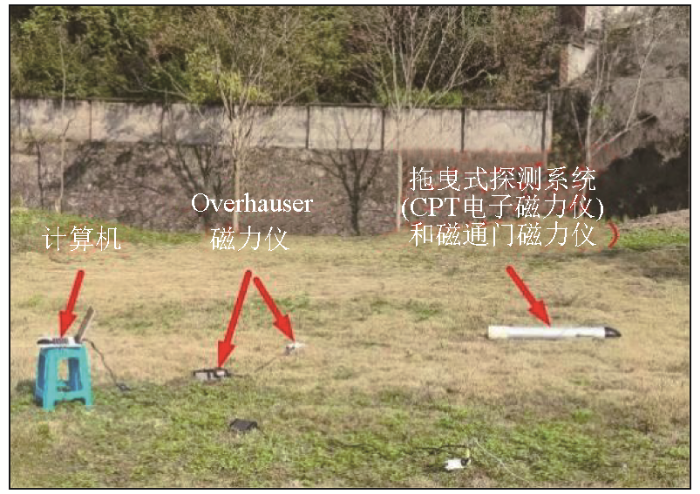
图6
3 数据分析与处理
3.1 数据处理流程
图7

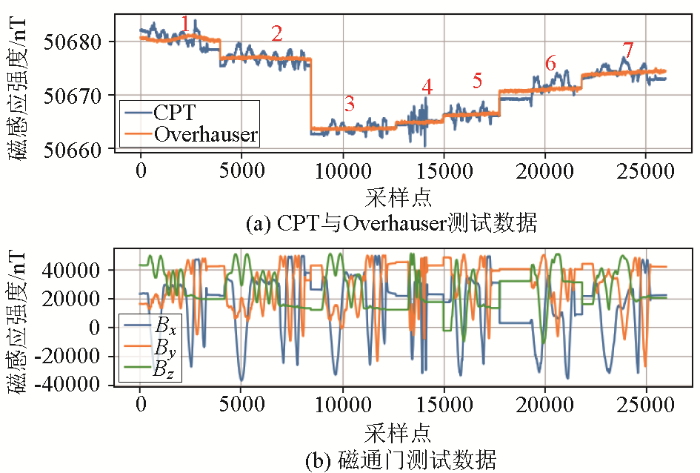
CPT原子磁力仪的标量场输出与Overhauser磁力仪输出、CPT转向差项之差以及特征输入数据共同构成数据集。在将数据输入神经网络之前,需要先对数据进行标准化,这不仅可以加快神经网络的计算速度,还能提高算法的精度。然后,将数据集1、4、5、6、7(如图6a所示)作为训练集,用于参数学习,数据集2作为验证集,用于模型验证及参数调整,数据集3作为测试集,用于评估训练后的模型性能。
以数据集2为例,CPT原子磁力仪的转向差补偿结果如图8所示。横轴表示采样数据点,左边纵轴表示CPT原子磁力仪转向差补偿前后的偏置项,已减去Overhauser磁力仪参考值。可以看出转向差补偿后偏置项峰峰值变小,降低了由传感器方向变化引起的测量误差。右边纵轴表示不同采样数据点对应的CPT原子磁力仪探头光轴与地磁场方向之间的夹角,主要为转向差补偿提供依据。
图8
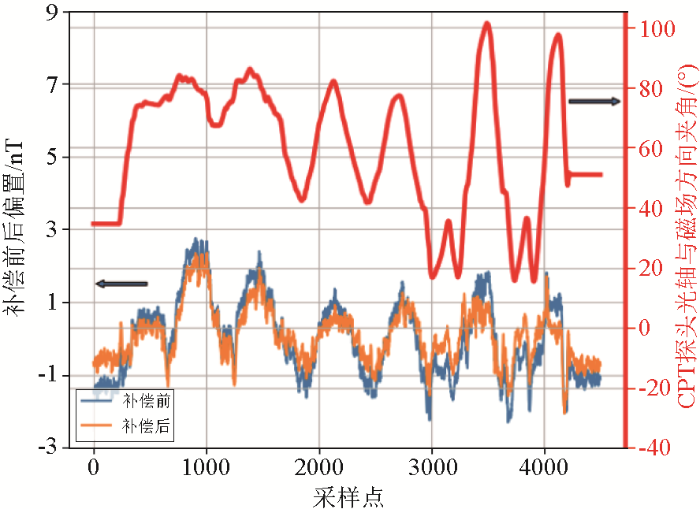
图8
CPT原子磁力仪转向差校准
Fig.8
Heading error compensation of the CPT atomic magnetometer
参数学习的过程属于监督式学习,需要根据数据集制作网络的输入和标签值。式(5)矩阵A的每一行18个元素与测量值差值向量(Bc-Be-Bh)一一对应,为了实现数据之间更有效的特征提取,设置序列长度参数也为18,即抽取矩阵A的18行作为网络输入,取抽取的第18行对应的测量差值作为标签值。
3.2 MCRNet网络分析
3.2.1 训练、验证及测试
神经网络训练过程中,采取批处理的方式每次随机的从训练集中抽取n个不同输入和标签值用于模型训练和优化,损失函数采用均方损失,并采用Adam优化器来训练神经网络[32]。直至所有训练集均输入至网络,完成一次训练。则该次训练误差表示为均方损失的平均值:
式中:m表示每次训练过程中训练集批量抽取的总次数;
在每次训练完成后,使用更新的模型计算验证误差。同样采取批量抽取的方式,然后计算每批次均方损失的平均值作为该次训练结果的验证误差:
式中:p表示每次训练过程中验证集批量抽取的总次数;xij和yij分别表示第i批次第j个输入和相应的标签值;fk(·)表示第k次训练的模型。
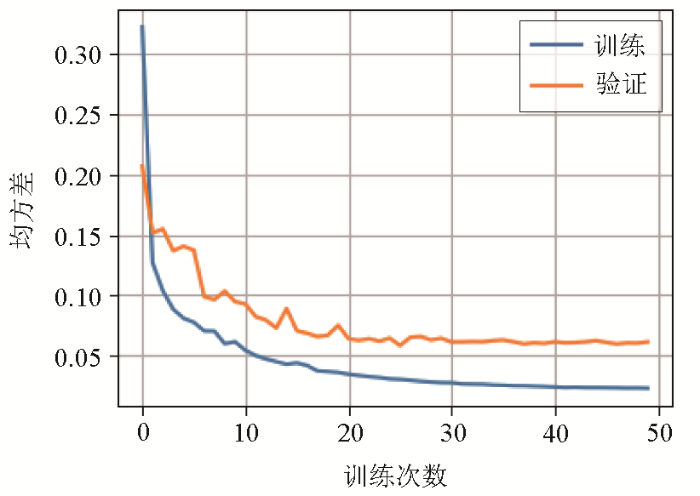
设置n=64,k=50,m、p可以根据实际数据长度计算。MCRNet网络训练过程的损失曲线如图9所示。从图中可以看出,在训练50次时,MCRNet网络模型的两条误差曲线趋于稳定,训练误差低于0.03,验证误差低于0.07。由于验证误差没有出现明显反常现象,因此模型训练没有过拟合。
图9
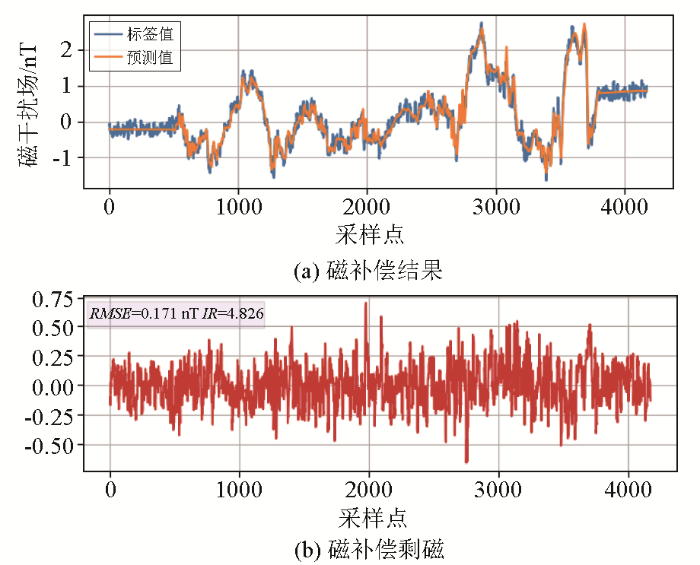
将训练好的模型分别用于测试集,使用补偿剩磁均方根(RMSE)和改善比(IR)来评估模型性能,RMSE越小且IR越大,模型性能越好。RMSE与IR指标定义如下:
式中:fM(·)表示训练完成的模型;xtest、ytest分别表示测试集输入和标签值。
图10
评估模型时,使用了浮点运算次数(FLOPs)、参数总数(parameter count,PC)、训练时间(training time,TT)以及预测时间(prediction time,PT)作为关键指标。FLOPs用于衡量模型的计算复杂度,而PC代表模型中的参数数量,它直接影响模型的复杂性及其过拟合的风险。TT则指训练模型所需的总时间,尤其在处理大型数据集和复杂模型时尤为重要。PT反映模型对新数据进行预测时的响应速度,这对于实时应用至关重要。所有的训练时间和预测时间均在配备NVIDIA GeForce RTX 4060 Laptop GPU的笔记本上完成。表2为MCRNet模型的相关指标信息,显示出其较高的FLOPs和PC,表明该模型具备较高的复杂度,因此训练时间TT也相对较长。同时,模型的PT为61.272 μs,远低于20 ms(对应50 Hz采样率),因此MCRNet模型能够适用于实时系统中。
表2 模型参数
Table 2
| 指标 | FLOPs | PC | TT/s | PT/μs |
|---|---|---|---|---|
| MCRNet | 14.927M | 3.847M | 332.882 | 61.272 |
从试验结果来看,MCRNet模型能够有效缓解深层神经网络中梯度消失和梯度爆炸问题,使得模型能够构建更深的层次而不过拟合。残差块的设计使模型能够专注于学习数据中的细微干扰特征,从而提升泛化能力,避免对训练数据的过度拟合,使其在测试集上表现出良好的性能和稳定性。在后续工作中,可以在保持模型高泛化能力和精度的前提下进一步优化其结构,减少模型复杂度,以降低计算资源消耗和训练时间。为此,可以考虑精简网络层数、应用参数剪枝、量化或知识蒸馏等技术,这将有助于提高模型在实际应用中的效率和适用性,特别是在实时处理需求高或计算资源受限的场景中。
3.2.2 与其他算法比较
将训练集用于式(4)中的TL线性磁补偿模型,进行模型参数估计后,使用估计得到的参数在测试集上进行磁干扰补偿,按照式(9)和式(10)计算补偿剩磁均方根误差(RMSE)和改善比(IR)。图11为不同算法模型在这两个指标上的比较结果。从图中可以看出,LS算法在训练集中学习的全局最优参数在测试集中的磁补偿效果较差。相比之下,Ridge算法通过引入惩罚项防止过拟合,预测性能有所提升,但由于惩罚项系数固定,效果有限。AF算法能够动态调整惩罚项系数,进一步提高了预测性能,但整体改善仍不明显。LAF算法通过滑动窗口匹配训练集中与测试集最相似的部分,进行局部磁补偿,然而在本实验中的效果不佳,表明训练集与测试集的重叠部分较少。
图11
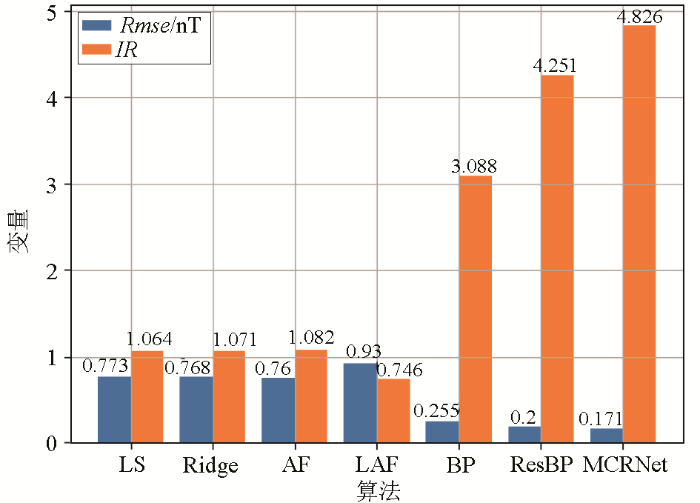
相比线性模型补偿方法,基于神经网络的磁补偿方法表现出更优的性能。BP网络在IR和RMSE指标上有显著提升,加入残差结构后的ResBP网络性能进一步改善。而本文提出的深度残差网络MCRNet模型在RMSE和IR指标上表现最佳。与传统方法中效果最好的ResBP网络相比,MCRNet模型将IR从4.251提升至4.826,增幅13.53%,同时将RMSE从0.2降低至0.171,减少了14.5%。
4 结论
本文针对基于CPT原子磁力仪的拖曳式磁异常探测系统中的磁补偿问题展开研究。传统的TL模型由于其线性特性,难以有效应对复杂的磁干扰,补偿效果有限;同时,常规神经网络在参数更新过程中易出现梯度消失或过拟合问题。为此,本文提出了一种基于深度学习的深度残差磁补偿模型(MCRNet),并应用于拖曳吊舱中的复杂磁干扰补偿。试验结果显示,与传统效果最佳的ResBP网络相比,MCRNet的磁补偿性能显著提升,IR从4.251提高至4.826,增幅13.53%,RMSE则从0.2降至0.171,减少了14.5%,显著提升了拖曳式磁探测系统的精度。这一成果将有助于地质勘探、海洋调查和国防安全等领域的高精度磁异常探测。未来的研究将聚焦于优化模型的计算复杂度和参数量,并探索其与其他深度学习方法或物理模型的结合,以进一步提升系统在实际磁异常探测任务中的抗干扰能力和探测精度。
参考文献
光泵原子磁力仪技术
[J].
Techniques in optically-pumped atomic magnetometer
[J].
Derivation and extensions of the tolles-lawson model for aeromagnetic compensation
[EB/OL].
Deep residual learning for image recognition
[C]//
Aeromagnetic compensation with suppressing heading error of the scalar atomic magnetometer
[J].
DOI:10.1109/LGRS.2019.2940824
[本文引用: 1]

Scalar atomic magnetometer (SAM) with high sensitivity is designed to measure the total magnetic field and has been widely applied in aeromagnetic surveys. However, the measured total magnetic field of SAM is influenced by the magnetic disturbances due to the permanent, induced and eddy-current fields of the aircraft and heading errors of SAM. To reduce the magnetic disturbances caused by the aircraft maneuvers, a model was proposed by Tolles and Lawson and has been used in aeromagnetic compensation. However, the heading error of SAM deviates the compensation coefficients estimated by the Tolles-Lawson model. In this letter, we propose a linear model of heading error for multi-cell SAMs and analyze the new aeromagnetic compensation model in which the geomagnetic gradient and heading error are both taken into account. With using a He-4 magnetometer consisting of three orthogonal cells, the experimental results show that our proposed model has better performances than the previous model in terms of the figure of merit (FOM) and standard deviation (STD).
An improved Overhauser magnetometer for Earth’s magnetic field observation
[C]//
An omnidirectional measurement technology of CPT magnetometer based on coupling of the dark state
[C]//
宇航用原子磁力仪研究与应用进展
[J].
DOI:10.3981/j.issn.2097-0781.2022.01.013
[本文引用: 1]
磁场的测量对科学研究和人类生活具有重要作用,如地磁变化与地震关系、心脑磁场分布变化与心脑健康关系等。原子磁力仪是一类高精度的磁力仪,已经发展了多个原理的传感器,性能不断提升。文章主要论述了原子磁力仪的研究进展、应用现状、存在的问题和宇航用原子磁力仪发展建议,认为应进一步提高精度和灵敏度、加强轻小型化、标定测试方法和张量测量等研究,以促进中国磁场测量科学进步和应用对社会的贡献。
Research and application progress of atomic magnetometers for aerospace
[J].
DOI:10.3981/j.issn.2097-0781.2022.01.013
[本文引用: 1]
The measurement of magnetic fields plays an important role in scientific research and human life. For example, geomagnetic variations can be used in earthquake prediction, and the changes in heart and brain magnetic field distributions contribute to the diagnosis of cardiovascular and cerebrovascular diseases. Characterized by high precision, several kinds of atomic magnetometers with different principles have been developed, and their performance keeps improving. This paper mainly discusses the key technologies, research progress, existing gap and development suggestions concerning atomic magnetometers. Future research of atomic magnetometers for aerospace should focus on accuracy and sensitivity improvements, miniaturization, calibration and tensor measurement to promote the advancement in magnetic field measurement and application in China.
Geometric approach to strapdown magnetometer calibration in sensor frame
[J].
On calibration of three-axis magnetometer
[J].
Scalar calibration of vector magnetometers
[J].
CPT原子磁力仪转向差及其标定补偿
[J].
Heading error calibration and compensation of CPT atomic magnetometer
[J].
Heading error calibration and compensation of CPT atomic magnetometer
[J].
DOI:10.19963/j.cnki.2097-4302.2024.01.011
[本文引用: 1]
The CPT atomic magnetometer exhibits characteristics such as dead-zone-free operation, and continuous measurement capability without the need for mode switching when the magnetic field direction changes. This makes it particularly suitable for applications on satellites, helicopters, and other platforms. However, the CPT atomic magnetometer is prone to heading errors, and sensor remanence can adversely affect the accuracy of heading error compensation. This paper analyzes the heading error mechanism of the CPT atomic magnetometer and establishes a sensor remanence compensation model. Particle Swarm Optimization (PSO) is employed to estimate the remanence parameters, and the heading error curve is derived using cubic spline interpolation. Experimental results demonstrate that the algorithm estimates the projected component of sensor remanence on the rotating surface to be 0.344 nT, perpendicular to the sensor axis. After compensating for remanence, the standard deviation of residual error following heading error compensation decreases from 0.288 nT to 0.132 nT, marking a 54% reduction. This method effectively enhances the application performance of the CPT atomic magnetometer.
Adam:A method for stochastic optimization
[C]//
航磁探测水下目标关键技术发展及应用
[J].
Key technology development and application on aeromagnetic detection of target underwater
[J].
航空电磁勘查技术发展现状及展望
[J].航空电磁作为一种高效的地球物理勘查技术手段, 其发展在国外(加拿大、澳大利亚等国家)已十分成熟.然而, 在我国该项技术仍处于发展当中, 在国内目前尚未形成具有实际探测能力的航空电磁系统和解释手段.这一现状严重影响了我国对地形地质条件复杂区域(比如广大西部地区)矿产资源勘查的需求.本文旨在通过系统介绍航空电磁勘查技术中的基础理论、关键技术、仪器系统、数据处理、解释及应用, 并对未来我国航空电磁勘查技术的发展提出建议, 使读者了解该技术未来发展方向和研究热点, 以期该项技术在我国得到快速发展并获得广泛应用.
Review on airborne EM technology and developments
[J].
美国反潜装备技术发展研究
[J].
Research on the development of anti-submarine equipment and technology
[J].
practice and interpretation
[M].
无人直升机航磁测量系统集成及应用
[J].
Unmanned helicopter aeromagnetic measurement system and its application
[J].
基于无人直升机平台的航磁系统集成与应用
[J].
Integration and application of an aeromagnetic survey system based on unmanned helicopter platform
[J].
An aeromagnetic compensation coefficient-estimating method robust to geomagnetic gradient
[J].
Unmanned aerial vehicles for magnetic surveys:A review on platform selection and interference suppression
[J].
Magnetic compensation of MAD equipped aircraft
[J].
一种顾及舱内OBE干扰的改进航磁补偿方法
[J].
A modified aeromagnetic compensation method robust to in-cabin OBE interferences
[J].
An aeromagnetic compensation method for suppressing the magnetic interference generated by electric current with vector magnetometer
[J].
37th Chinese Control Conference (CCC)
Aeromagnetic compensation method based on ridge regression algorithm
[J].
Adaptive techniques and other recent developments in aeromagnetic compensation
[J].
An adaptive aeromagnetic compensation method based on local linear regression
[J].
Aeromagnetic compensation using neural networks
[J].
An aeromagnetic compensation algorithm based on radial basis function artificial neural network
[J].
An aeromagnetic compensation algorithm based on a residual neural network
[J].
Sources of heading errors in optically pumped magnetometers operated in the Earth’s magnetic field
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}