0 引言
超声成像检测(UT)方法在医学、无损检测领域应用广泛,随着相控超声检测(PAUT)的出现,该方法以其探测范围广、分辨率高、灵敏度高等优势被广泛认可,在应用中已出现成熟的设备以及相关的规范和标准[1 ] 。
随着电子计算机算力的提高,双全法(全矩阵采集和全聚焦法)成为超声成像的研究热点。双全法利用全矩阵数据采集技术以及后处理技术对所有成像点进行全聚焦成像[2 ] ,得到的图像比PAUT具有更高的信噪比、分辨率以及更小的盲区。但双全法相比PAUT采集到的数据大几个数量级,很难做到探测结果的实时成像[3 ] 。
平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差。为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中。
自适应或基于逆散射的方法能有效提高成像的分辨率和对比度,但会抑制背景散斑的强度,且需要较强的算力支持,而神经网络方法距实用还有较大的差距。此外,波束合成方法无法实现探测空间的全成像点聚焦成像,而基于延时叠加的平面波成像方法仅能对平面波区域进行成像,对平面波区域外侧的范围只能通过控制波速偏转进行成像。
本文从全聚焦方法原理出发,研究基于平面波数据的全成像点聚焦成像方法。利用换能器阵列发射平面波信号,平面波信号经介质内部探测对象反射,由面阵中各个阵元独立接收。通过求解程函方程得到面阵发射的平面波传播时间改进全聚焦成像公式,将各阵元独立接收的数据延时叠加,对三维空间所有成像点进行聚焦成像。
1 全聚焦三维成像
1.1 三维全矩阵数据采集
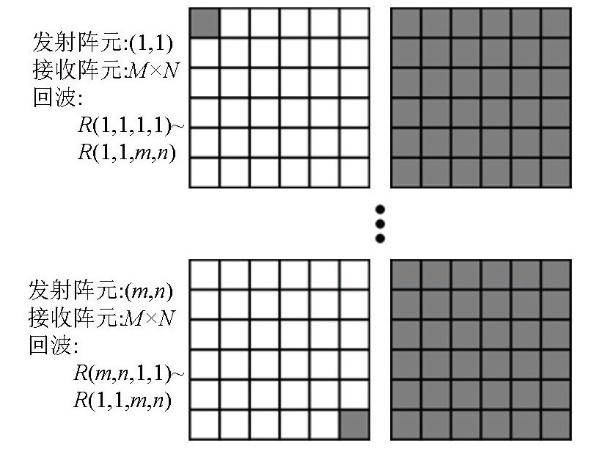
使用M 行N 列的面阵换能器阵列可采集全矩阵数据。面阵中每个换能器具有发射和接收超声信号的功能。采集过程如图1 所示,首先激发第1行1列的阵元发射超声波,所有M ×N 个阵元接收信号,其中第m 行n 列阵元接收到的数据记为R (1,1,m ,n )(1≤m ≤M ,1≤n ≤N )。然后依次按行或列逐步增加的顺序激发i 行j 列(1≤i ≤M ,1≤j ≤N )阵元激发超声波,所有阵元接收信号得到数据R (i ,j ,m ,n )。
图1
图1
全矩阵采集示意
Fig.1
Schematic diagram of FMC
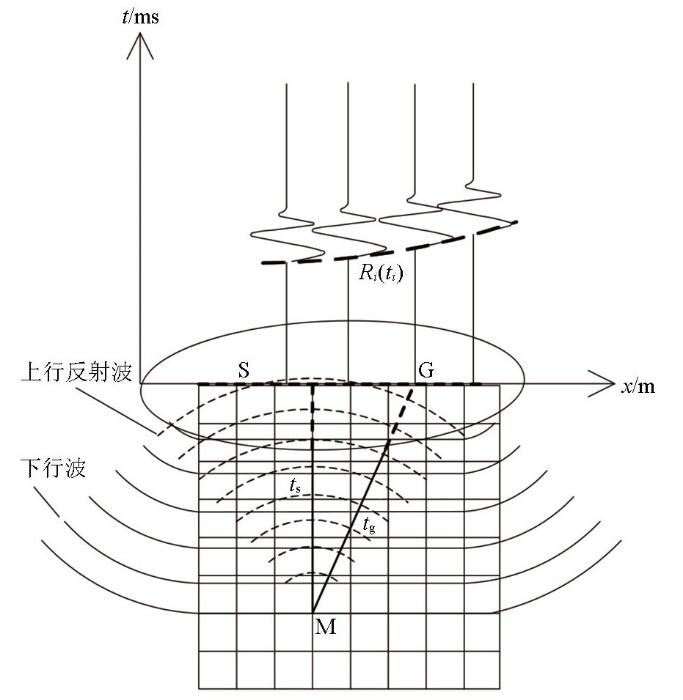
重复上述过程完成所有阵元发射、接收信号得到三维全矩阵数据如图2 所示。其中R (i ,j ,m ,n )为第i 行j 列阵元发射,m 行n 列阵元接收到的每个采样时间点的信号幅值。
![]()
1.2 三维全聚焦成像
对于全矩阵数据三维全聚焦成像,首先要确定三维成像区域,根据分辨率划分成像网格点,利用全矩阵数据在每个成像点聚焦成像。
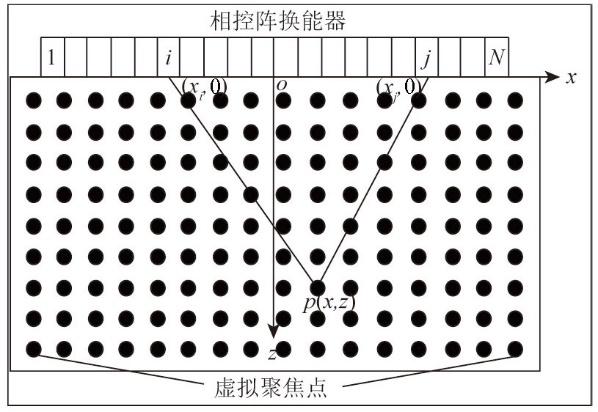
如图3 所示,以面阵中心为原点建立直角坐标系,x 、y 为面阵行、列方向;z 为介质方向;成像点P 坐标为(xp ,yp ,zp );发射阵元S 中心点坐标为(xs ,ys ,zs );接收阵元G 中心坐标为(xg ,yg ,zg ),则声波从发射阵元S 到成像点P 的传播时间ts 和成像点P 到接收阵元G 的传播时间tg 分别为:
(1) $\begin{array}{l}t_{\mathrm{s}}=\sqrt{\left(x_{s}-x_{p}\right)^{2}+\left(y_{s}-y_{p}\right)^{2}+\left(z_{s}-z_{p}\right)^{2}} / v, \\t_{\mathrm{g}}=\sqrt{\left(x_{g}-x_{p}\right)^{2}+\left(y_{g}-y_{p}\right)^{2}+\left(z_{g}-z_{p}\right)^{2}} / v 。\end{array}$
图3
图3
全聚焦成像示意[14 ]
Fig.3
Schematic diagram of TFM
对全矩阵数据中所有收发记录R (i ,j ,m ,n )中索引插值求得t 时刻的振幅值累加求和,可得到成像点P 时刻的成像幅值Ip ,计算公式如下:
(2) $I_{p}=\sum_{i=1}^{M} \sum_{j=1}^{N} \sum_{m=1}^{M} \sum_{n=1}^{N} R_{i, j, m, n}\left(t_{s, p, g}\right),$
式中:Ri , j , m , n i 行j 列阵元S 发射,m 行n 列阵元G 接收的单道记录;ts , p , g S 到成像点P 到接收阵元G 的传播时间之和。
对探测区域中所有成像点的成像值Ip 归一化显示即可得到探测区域的三维探测结果。
2 平面阵全聚焦三维成像
平面阵数据采集与全矩阵数据采集均使用所有的阵元接收信号,二者的区别在于波场的发射过程不同。全矩阵采集通过单阵元发射球状扩散的波场信号,需要进行N (阵元数)次采集,而平面阵采集时,所有阵元同步发射产生平面波信号,只需要进行1次数据采集即可。为实现对平面阵数据成像,需要结合平面波传播时间特点进行聚焦成像。
2.1 面阵激发的时间特征
(3) $\frac{\partial ^{2} \varphi }{\partial t^{2}}-V^{2}\nabla ^{2}\varphi =0,$
式中:φ 为质点位移;V 为介质中声波传播速度;t 为时间;∇ 2 图4 所示,图中红点为该切片中阵元。若以单个点振源激发,则波场传播则以球面扩散传播。
图4
图4
平面阵激发波场快照切片
Fig.4
Snapshot slice of planar array excited wave field
由于波场传播的差异,无法对平面波数据使用全聚焦成像法则进行成像,首先需要针对平面波场计算平面阵声波到达成像点的时间。
2.2 快速步进法计算下行波时间
快速步进法(fast marching method,FMM)基于程函方程计算波场传播时间,本文利用程函方程求解平面阵中所有阵元同步激发时的平面波传播时间。三维情况下程函方程[15 ] 为
(4) $\begin{array}{c}{\left[\frac{\partial t(x, y, z)}{\partial x}\right]^{2}+\left[\frac{\partial t(x, y, z)}{\partial y}\right]^{2}+\left[\frac{\partial t(x, y, z)}{\partial z}\right]^{2}} \\=s^{2}(x, y, z),\end{array}$
式中:t 为声波传播时间;s 为声波在介质中传播的慢度(速度的倒数)。
FMM方法使用迎风差分格式和窄带法求解程函方程,式(4)使用迎风有限差分格式[15 ] 为
(5) $\left[\begin{array}{l}\max \left(D_{i, j, k}^{-x} t,-D_{i, j, k}^{+x} t, 0\right)+ \\\max \left(D_{i, j, k}^{-y} t,-D_{i, j, k}^{+y} t, 0\right)+ \\\max \left(D_{i, j, k}^{-z} t,-D_{i, j, k}^{+z} t, 0\right)\end{array}\right]^{1 / 2}=s_{i, j, k},$
式中:D i , j , k - x 、 D i , j , k + x 、 D i , j , k - y 、 D i , j , k + y 、 D i , j , k - z 、 D i , j , k + z t 在网格节点i 、j 、k 处在x 、y 、z 方向向前和向后的差分算子。一阶迎风差分算子[15 ] 为:
(6) $\begin{array}{l}D_{i, j, k}^{-x} t=\frac{t_{i, j, k}-t_{i-1, j, k}}{\Delta x}, D_{i, j, k}^{+x} t=\frac{t_{i+1, j, k}-t_{i, j, k}}{\Delta x} ; \\D_{i, j, k}^{-y} t=\frac{t_{i, j, k}-t_{i, j-1, k}}{\Delta y}, D_{i, j, k}^{+y} t=\frac{t_{i, j+1, k}-t_{i, j, k}}{\Delta y} ; \\D_{i, j, k}^{-z} t=\frac{t_{i, j, k}-t_{i, j, k-1}}{\Delta z}, D_{i, j, k}^{+z} t=\frac{t_{i, j, k+1}-t_{i, j, k}}{\Delta z} 。\end{array}$
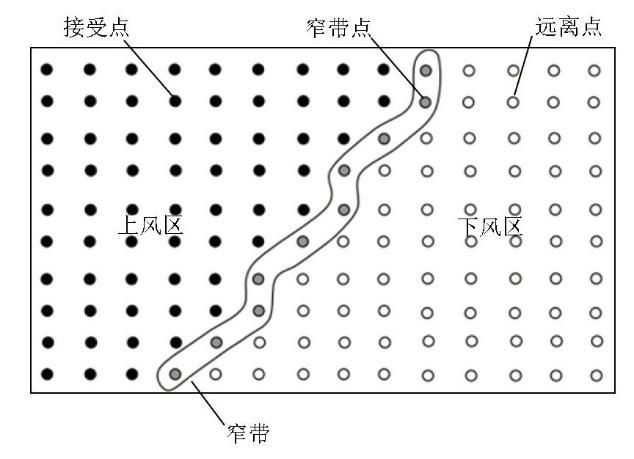
迎风格式计算网格节点处的传播时间的实现过程如图5 所示,将网格划分为3个区域,即上风区、窄带区以及下风区。上风区(图中黑点区域)为已计算完成的区域,该区域网格节点处的时间为振源经过该点时的最小时间。窄带区(图中灰点区域)为波前面网格点,按式(6)计算网格点最小传播时间,通过排序方法取该区域最小时间点划分到上风区。下风区(图中白点区域)为待计算时间的网格节点区域。
图5
图5
FMM波前传播示意
Fig.5
Diagram of FMM wavefront propagation
计算开始时,将面阵中各个阵元点同时激活,赋初始值为0,其他网格点赋值为无穷大,计算过程中波前面逐渐向外扩散传播,计算完成后,所有网格节点时间均为声波从平面阵到各网格节点传播的最小时间。该方法还可用于相控波场传播时间的计算,通过给面阵中各阵元不同延时的初值还可以计算不同偏转角度的平面波到达时。
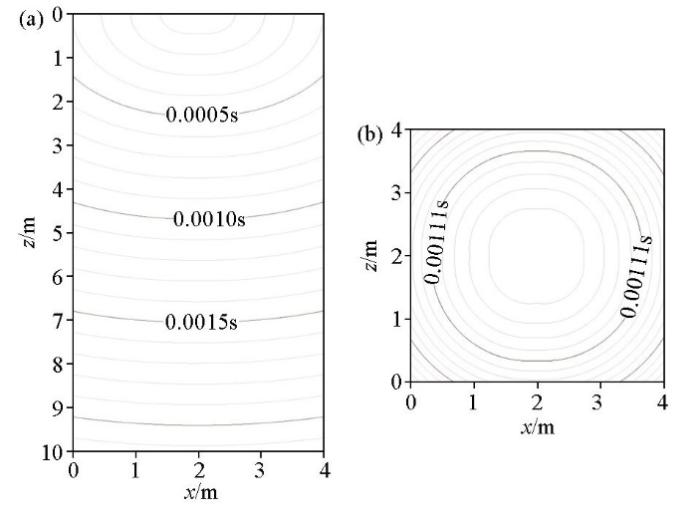
建立长宽4 m、深10 m、速度4 500 m/s的简易模型,在模型顶面设置长宽为28 cm的7×7平面阵激发超声平面波,在x =2和z =5的位置提取等时切片如图6 所示。
图6
图6
平面波传播等时面切片 a—垂直切片;b—水平切片
Fig.6
Slice diagram of plane wave direct wave front isochron a—vertical slice;b—horizontal slice
2.3 面阵全聚焦三维成像
根据全聚焦成像式(2),其核心思想是求得声波从发射阵元到成像点再到接收阵元的传播时间t ( s , p , g ) ,再从全矩阵数据中的每一道记录计算t 时刻的振幅值累计求和。然而平面阵换能器激发的平面波传播到成像点的时间并不能使用简单的式(2)计算得到。
本文针对各向同性均匀介质中的缺陷、空洞的全矩阵—全聚焦成像检测提出改进方法,采用面阵采集,优化成像公式。平面阵全聚焦成像过程如图7 所示,平面换能器阵列中所有阵元同步激发产生平面波向下传播,平面波在探测对象处—产生反射,此时反射点可以看作次级振源,反射回的波场被所有阵元独立的接收,得到平面阵数据R (m ,n )。因此,超声波的发射过程可以利用FMM方法求解程函方程可得到平面波到成像点的传播时间t s ,而从成像点到接收阵元的传播时间t g 则可以沿用前文计算式(1)得到,则声波双程传播总时间t =t s +t g 。
图7
图7
平面波全聚焦成像示意
Fig.7
Schematic diagram of plane array TFM
对平面阵数据中所有接收记录R (m ,n )中索引插值求得t 时刻的振幅值累加求和可得到成像点P时刻的成像幅值I p ,计算公式[16 ] 如下:
(7) $I_{p}=\sum^{M}_{m=1}\sum^{N}_{n=1}R_{m,n}(t_{s,p,g}),$
式中:Rm , n m 行n 列阵元接收的单道记录;ts , p , g I p 归一化显示即可得到探测区域的三维探测结果。
对于各向同性均匀介质,用于计算传播时间ts , p , g
2.4 全聚焦成像数据校准
从全聚焦成像式(2)和(7)中可以看出,全矩阵数据或平面阵数据全部参与了成像点的成像值计算,然而,由于超声换能器的指向性特点,其能量分布在不同的方向上强度也不同,需要进行校准。超声波发射过程是整个平面阵激发,需要使用面阵校准,接收过程是单个阵元单独接收,需要进行单阵元校准。
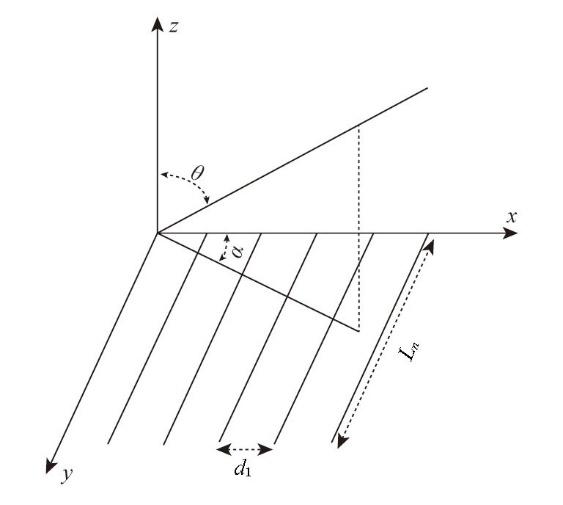
1)指向性校准。对于M ×N 面阵,可以看做M 列长度为Ln 的线阵元复合而成,其中M 阵元方向为x ,N 阵元方向为y ,沿介质方向为z 。如图8 所示Ln 为N 阵元方向长度,α 为成像点在面阵平面投影与x 方向的夹角,θ 为成像点与面阵中心在面阵平面的夹角。
图8
图8
线阵复合平面阵
Fig.8
Linear composite planar array
(8) $D_{1}(\alpha,\beta )=sinc(\frac{kL}{2}sin\alpha sin\theta ),$
式中:k 为波数,k =2π/λ ,对于均匀的线阵,其指向性函数[17 ] 为
(9) $D_{2}(\alpha, \theta)=\frac{\sin \left[\frac{k M d_{1}}{2} \cos \alpha \sin \theta\right]}{M \sin \left[\frac{k d_{1}}{2} \cos \alpha \sin \theta\right]},$
式中:M 为面阵的行数;d 1 为线阵元之间的间距。复合面阵指向性函数[17 ] 为
(10) $D_{s}=D_{1}×D_{2},$
当校正接收波场时,采用单阵元指向性校正公式[16 ] :
(11) $D_{g}=sinc(\frac{\pi α sinβ}{\lambda }),$
式中:Dg 为接收波场指向性;a 为阵元宽度;β 为成像点与接收阵元在z 方向的夹角;λ 为超声波在介质中传播波长。
2)传播衰减校准。三维空间中声波由发射点到接收点的幅值衰减与传播距离dg 之间的关系为
(12) $A_{x}=\frac{A_{0}}{4\pi d_{x}}$
式中:A 0 表示发射信号幅值;Ax 为声波传播距离dx 衰减后的幅值。
由面振源发射声波到成像点P处的声波衰减系数[16 ] 为
(13) $B_{s}=\sum^{M}_{m=1} \sum^{N}_{n=1} \frac{1}{4 \pi d_{s}}, B_{g}=\frac{1}{4 \pi d_{g}}。$
式中:ds 为m 行n 列阵元到成像点距离;dg 为成像点到m 行n 列接收阵元的距离。
(14) $C_{s,p,g}=D_{s}×D_{g}×B_{g}×B_{s},$
(15) I p = ∑ m = 1 M ∑ n = 1 N R m , n ( t s , p , g ) C s , p , g
3 仿真试验
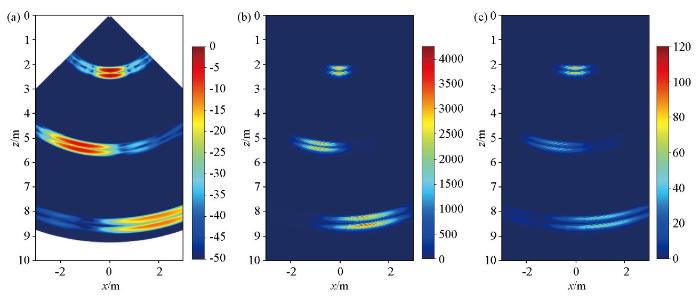
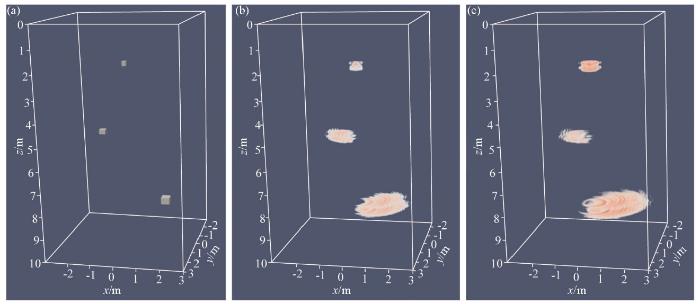
本文使用Filed Ⅱ工具包对面阵换能器探测灰岩中溶腔进行仿真(图9 、图10 ),建立三维模型,模型x 、y 方向范围为-3~3 m,z 方向深度为0~10 m。模型中不同位置设置3个大小不同的溶腔(如图10a 所示)。
图9
图9
Field Ⅱ 仿真三维成像切片
a—相控扫描成像剖面;b—双全法成像剖面;c—平面阵全聚焦成像剖面
Fig.9
Field Ⅱ simulation 3D imaging slice diagram
a—phased scan imaging profile;b—FMC-TFM imaging profile;c—PATFM 3D imaging profile
图10
图10
全聚焦三维成像
a—三维模型;b—双全法三维成像;c—平面阵全聚焦三维成像
Fig.10
TFM 3D image
a—3D model;b—FMC-TFM 3D imaging;c—PATFM 3D imaging
设置灰岩声波速度v = 4 500 m/s,采用7×7换能器阵列进行探测,换能器中心频率f 0 = 45 kHz,采样频率为fs = 1 MHz,阵元间距0.05 m,阵元大小0.04 m;采用正弦脉冲激励,激励窗口为2个周期。
分别使用面阵发射延迟相控扫描成像、全矩阵采集—全聚焦成像与平面阵采集—全聚焦成像进行数据采集仿真与成像。
首先模拟针对该模型使用相控扫描成像,利用面阵换能器聚焦特性进行,采用延迟发射的方式控制波速偏转角度,沿x 方向对面阵换能器下方-50°~50°范围进行扫描成像,成像结果如下图9a 。
其次采用全矩阵方式采集7×7矩阵的数据,得到2 401道全矩阵记录。对全矩阵数据进行全聚焦成像,成像结果在x 方向y =0的剖面如下图9b ,三维成像结果如图10b 。
然后采用平面阵方式采集数据,得到49道平面阵记录。对平面阵数据进行全聚焦成像,结果在x 方向y =0的剖面如下图9c ,三维成像结果如图10c 。图9 可以看出使用相控扫描成像方法使用边长约为0.35 m的换能器阵列可以探测到较大范围的溶腔,但是成像质量较差,分辨率较低,且溶腔所在深度存在较强的弧形假干扰。使用双全法的成像效果和平面阵全聚焦方法接近,均可以较好地探测到溶腔位置,且分辨率相比相控扫描方式大大提高。相比双全法的全矩阵数据叠加,平面阵聚焦成像通过单次数据采集成像,成像能量有所降低。
图10b、c 所示为相同视角下三维溶腔模型、双全法和平面阵全聚焦法三维成像结果对比,顶部蓝色区域为边长0.35 m的面阵换能器。从图中来看双全法成像聚焦性要优于平面阵全聚焦方法,但是从整个过程来看,双全法数据采集需要实现N (N 为所有阵元数,下同)次发射接收,而平面阵全聚焦方法只需要1次即可。双全法得到的数据量和成像计算时间是平面阵全聚焦方法的N 倍。以上述7×7阵列仿真情况为例,数据采集样点数为5 000,x 、y 方向成像范围为-3~3 m,z 方向成像范围为0~10 m,成像点间隔0.02 m,聚焦成像点数为301×301×501个,仿真及计算情况对比如表1 。
表1 中聚焦计算使用Intel Xeon Silver 10核处理器,计算主频2.2 GHz。平面阵全聚焦成像耗时包含了FMM方法计算平面波传播时间的耗时64.7 s,总耗时大约是双全法计算时间的1/10,若探测对象为速度接近的均匀各向同性完整岩体,该计算过程还可以通过给定时间表进行替换,计算速度还可以进一步提升。
由于面阵换能器大小有限,而探测范围较大,探测结果中溶腔异常与实际模型相差较大,为提高探测精度,增加换能器规模。本文使用16×16换能器阵对相同模型进行仿真模拟,使用平面阵全聚焦方式成像结果如下图11 ,图中红框为模型位置,设置色标阈值为[150,800]时,三处反射能量团能范围基本与模型吻合,相比7×7面阵换能器成像精度大大提高。
图11
图11
16×16平面阵全聚焦成像剖面
Fig.11
TFM slice diagram of 16×16 planar array
4 结论
本文从全聚焦方法原理出发,提出基于平面阵数据的全成像点聚焦成像方法(PATFM),采用平面阵激发超声平面波,各阵元独立接收信号得到平面阵数据。通过求解程函方程得到超声波传播时间改进全聚焦成像公式对平面阵数据延时叠加进行聚焦成像。
使用双全法和平面阵全聚焦方法相比相控扫描成像均可以对面阵前方一定角度范围内全成像点进行聚焦成像。相比双全法成像,平面阵全聚焦成像的数据采集过程大大的简化,而且极大地减少了数据量与成像计算时间。
平面阵全聚焦方法通过单次数据采集成像,相比双全法的全矩阵数据叠加,成像能量和信噪比会有所降低,后续可以通过换能器发射延迟使平面波方向偏转,再结合全聚焦成像的方法提高成像精度与范围。该方法同样适用于线阵全聚焦方法,可对多条线阵采集的数据进行三维成像。
参考文献
View Option
[1]
李衍 . 超声相控阵与全聚焦法成像特性比照评析
[J]. 无损探伤 , 2021 , 45 (1 ):1 -6 .
[本文引用: 1]
Li Y Comparative analysis of imaging characteristics of ultrasonic phased array and total focusing method
[J]. Nondestructive Testing Technology , 2021 , 45 (1 ):1 -6 .
[本文引用: 1]
[2]
章东 , 桂杰 , 周哲海 . 超声相控阵全聚焦无损检测技术概述
[J]. 声学技术 , 2018 , 37 (4 ):320 -325 .
[本文引用: 1]
Zhang D Gui J Zhou Z H A review of total focusing method for ultrasonic phased array imaging
[J]. Technical Acoustics , 2018 , 37 (4 ):320 -325 .
[本文引用: 1]
[3]
黄文大 , 李衍 . 全矩阵捕获和全聚焦法相控阵成像检测技术
[J]. 无损检测 , 2021 , 43 (11 ):72 -78 .
DOI:10.11973/wsjc202111015
[本文引用: 1]
概述了双全法[全矩阵捕获(FMC)和全聚焦法(TFM)]相比于常规PAUT(相控阵超声检测)的优势,探索了可替代的数据采集成像技术,研究了关键参数的校验方法并分析了典型的应用案例,可望为双全法一般用法的标准化提供有益借鉴。
Huang W D Li Y FMC and TFM phased array imaging detection technology
[J]. Nondestructive Testing , 2021 , 43 (11 ):72 -78 .
DOI:10.11973/wsjc202111015
[本文引用: 1]
This article outlines the advantages of the full matrix capture (FMC) and total focus method (TFM) technology compared to conventional PAUT(phased array ultrasonic testing), explores alternative data acquisition and imaging techniques, and discusses the calibration of key parameters. Some typical application cases were analyzed, which were expected to provide a useful reference for the standardization of the general use of the FMC and TFM technology.
[4]
张经科 , 何琼 , 罗建文 . 平面波超声成像中的波束合成方法研究进展
[J]. 应用声学 , 2021 , 40 (1 ):22 -32 .
[本文引用: 1]
Zhang J K He Q Luo J W Research progress of beamforming methods in plane-wave ultrasound imaging
[J]. Journal of Applied Acoustics , 2021 , 40 (1 ):22 -32 .
[本文引用: 1]
[5]
Vignon F Burcher M R Capon beamforming in medical ultrasound imaging with focused beams
[J]. IEEE Transactions on Ultrasonics Ferroelectrics and Frequency Control , 2008 , 55 (3 ):619 -628 .
DOI:10.1109/TUFFC.2008.686
PMID:18407851
[本文引用: 1]
Medical ultrasound imaging is conventionally done by insonifying the imaged medium with focused beams. The backscattered echoes are beamformed using delay-and-sum operations that cannot completely eliminate the contribution of signals backscattered by structures off the imaging beam to the beamsum. It leads to images with limited resolution and contrast. This paper presents an adaptation of the Capon beamformer algorithm to ultrasound medical imaging with focused beams. The strategy is to apply data-dependent weight functions to the imaging aperture. These weights act as lateral spatial filters that filter out off-axis signals. The weights are computed for each point in the imaged medium, from the statistical analysis of the signals backscattered by that point to the different elements of the imaging probe when insonifying it with different focused beams. Phantom and in vivo images are presented to illustrate the benefits of the Capon algorithm over the conventional delay and-sum approach. On heart sector images, the clutter in the heart chambers is decreased. The endocardium border is better defined. On abdominal linear array images, significant contrast and resolution enhancement are observed.
[6]
Chau G Lavarello R Dahl J Short-lag spatial coherence weighted minimum variance beamformer for plane-wave images
[C]// IEEE International Ultrasonics Symposium,IUS,IEEE , 2016 .
[本文引用: 1]
[7]
Lokesh B Thittai A K Spatial resolution improvement in plane wave imaging using adaptive sign coherence factor weighting
[C]// IEEE International Ultrasonics Symposium,IUS,IEEE , 2016 .
[本文引用: 1]
[8]
Moubark A M Alomari Z Harput S et al. Enhancement of contrast and resolution of B-mode plane wave imaging (PWI) with non-linear filtered delay multiply and sum (FDMAS) beamforming
[C]// IEEE International Ultrasonics Symposium,IUS , 2016 .
[本文引用: 1]
[9]
Zhang B Robert J L David G Dual-domain compressed beamforming for medical ultrasound imaging
[C]// 2015 IEEE International Ultrasonics Symposium,IUS , 2015 .
[本文引用: 1]
[10]
Besson A Perdios D Martinez F et al. Ultrafast ultrasound imaging as an inverse problem:Matrix-free sparse image reconstruction
[J]. IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control , 2018 , 65 (3 ):339 -355 .
DOI:10.1109/TUFFC.2017.2768583
URL
[本文引用: 1]
[11]
Wiacek A Gonzalez E Bell M A L CohereNet:A deep learning architecture for ultrasound spatial correlation estimation and coherence-based beamforming
[J]. IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control , 2020 , 67 (12 ):2574 -2583 .
DOI:10.1109/TUFFC.58
URL
[本文引用: 1]
[12]
Hyun D Brickson L L Looby K T et al. Beamforming and speckle reduction using neural networks
[J]. IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,IEEE , 2019 , 66 (5 ):898 -910 .
[本文引用: 1]
[13]
Zhang X Liu J He Q et al. High quality reconstruction of plane-wave imaging using generative adversarial network
[C]// IEEE International Ultrasonics Symposium,IUS , 2018 .
[本文引用: 1]
[14]
张杰 , 莫润阳 . 超声相控阵全聚焦成像算法比较分析
[J]. 声学技术 , 2021 , 40 (1 ):71 -76 .
[本文引用: 1]
Zhang J Mo R Y Comparative analysis of total focusing method in ultrasonic array imaging algorithms
[J]. Technical Acoustics , 2021 , 40 (1 ):71 -76 .
[本文引用: 1]
[15]
李永博 . VTI介质及复杂模型FMM射线追踪方法研究 [D]. 西安 : 长安大学 , 2012 .
[本文引用: 3]
Li Y B Study on FMM ray tracing method for VTI media and Complex Model [D]. Xi'an : Chang'an University , 2012 .
[本文引用: 3]
[16]
周正干 , 彭地 , 李洋 , 等 . 相控阵超声检测技术中的全聚焦成像算法及其校准研究
[J]. 机械工程学报 , 2015 , 51 (10 ):1 -7 .
[本文引用: 6]
Zhou Z G Peng D Li Y et al. Research on phased array ultrasonic total focusing method and its calibration
[J]. Journal of Mechanical Engineering , 2015 , 51 (10 ):1 -7 .
[本文引用: 6]
[17]
巩建辉 , 严碧歌 . 线阵组合平面阵的指向性研究
[J]. 南阳师范学院学报 , 2011 , 10 (6 ):21 -24 .
[本文引用: 2]
Gong J H Yan B G Research on directivity of linear array combined with planar array
[J]. Journal of Nanyang Normal University , 2011 , 10 (6 ):21 -24 .
[本文引用: 2]
超声相控阵与全聚焦法成像特性比照评析
1
2021
... 超声成像检测(UT)方法在医学、无损检测领域应用广泛,随着相控超声检测(PAUT)的出现,该方法以其探测范围广、分辨率高、灵敏度高等优势被广泛认可,在应用中已出现成熟的设备以及相关的规范和标准[1 ] . ...
超声相控阵与全聚焦法成像特性比照评析
1
2021
... 超声成像检测(UT)方法在医学、无损检测领域应用广泛,随着相控超声检测(PAUT)的出现,该方法以其探测范围广、分辨率高、灵敏度高等优势被广泛认可,在应用中已出现成熟的设备以及相关的规范和标准[1 ] . ...
超声相控阵全聚焦无损检测技术概述
1
2018
... 随着电子计算机算力的提高,双全法(全矩阵采集和全聚焦法)成为超声成像的研究热点.双全法利用全矩阵数据采集技术以及后处理技术对所有成像点进行全聚焦成像[2 ] ,得到的图像比PAUT具有更高的信噪比、分辨率以及更小的盲区.但双全法相比PAUT采集到的数据大几个数量级,很难做到探测结果的实时成像[3 ] . ...
超声相控阵全聚焦无损检测技术概述
1
2018
... 随着电子计算机算力的提高,双全法(全矩阵采集和全聚焦法)成为超声成像的研究热点.双全法利用全矩阵数据采集技术以及后处理技术对所有成像点进行全聚焦成像[2 ] ,得到的图像比PAUT具有更高的信噪比、分辨率以及更小的盲区.但双全法相比PAUT采集到的数据大几个数量级,很难做到探测结果的实时成像[3 ] . ...
全矩阵捕获和全聚焦法相控阵成像检测技术
1
2021
... 随着电子计算机算力的提高,双全法(全矩阵采集和全聚焦法)成为超声成像的研究热点.双全法利用全矩阵数据采集技术以及后处理技术对所有成像点进行全聚焦成像[2 ] ,得到的图像比PAUT具有更高的信噪比、分辨率以及更小的盲区.但双全法相比PAUT采集到的数据大几个数量级,很难做到探测结果的实时成像[3 ] . ...
全矩阵捕获和全聚焦法相控阵成像检测技术
1
2021
... 随着电子计算机算力的提高,双全法(全矩阵采集和全聚焦法)成为超声成像的研究热点.双全法利用全矩阵数据采集技术以及后处理技术对所有成像点进行全聚焦成像[2 ] ,得到的图像比PAUT具有更高的信噪比、分辨率以及更小的盲区.但双全法相比PAUT采集到的数据大几个数量级,很难做到探测结果的实时成像[3 ] . ...
平面波超声成像中的波束合成方法研究进展
1
2021
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
平面波超声成像中的波束合成方法研究进展
1
2021
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
Capon beamforming in medical ultrasound imaging with focused beams
1
2008
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
Short-lag spatial coherence weighted minimum variance beamformer for plane-wave images
1
2016
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
Spatial resolution improvement in plane wave imaging using adaptive sign coherence factor weighting
1
2016
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
Enhancement of contrast and resolution of B-mode plane wave imaging (PWI) with non-linear filtered delay multiply and sum (FDMAS) beamforming
1
2016
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
Dual-domain compressed beamforming for medical ultrasound imaging
1
2015
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
Ultrafast ultrasound imaging as an inverse problem:Matrix-free sparse image reconstruction
1
2018
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
CohereNet:A deep learning architecture for ultrasound spatial correlation estimation and coherence-based beamforming
1
2020
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
Beamforming and speckle reduction using neural networks
1
2019
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
High quality reconstruction of plane-wave imaging using generative adversarial network
1
2018
... 平面波成像在一定程度综合了相控扫描成像和全聚焦成像的优点,利用换能器阵列同时发射和接收非聚焦波束;但是,得到的图像信噪比、分辨率以及对比度较差.为了提高成像质量,新的波速合成方法不断被提出来[4 ] ,最小方差法[5 ] 、短间隔空间相干成像[6 ] 、相干系数方法[7 ] 、延时—相乘—叠加方法[8 ] 等自适应波束合成方法,基于频域模型[9 ] 和时域模型[10 ] 的逆问题求解的波束合成方法以及基于深度学习的自适应波束合成[11 ] 、端到端波束合成[12 ] 、波束合成图像后处理等方法[13 ] 不断被提出并应用到平面波成像中. ...
超声相控阵全聚焦成像算法比较分析
1
2021
... 如
图3 所示,以面阵中心为原点建立直角坐标系,
x 、
y 为面阵行、列方向;
z 为介质方向;成像点
P 坐标为(
xp ,
yp ,
zp );发射阵元
S 中心点坐标为(
xs ,
ys ,
zs );接收阵元
G 中心坐标为(
xg ,
yg ,
zg ),则声波从发射阵元
S 到成像点
P 的传播时间
ts 和成像点
P 到接收阵元
G 的传播时间
tg 分别为:
(1) $\begin{array}{l}t_{\mathrm{s}}=\sqrt{\left(x_{s}-x_{p}\right)^{2}+\left(y_{s}-y_{p}\right)^{2}+\left(z_{s}-z_{p}\right)^{2}} / v, \\t_{\mathrm{g}}=\sqrt{\left(x_{g}-x_{p}\right)^{2}+\left(y_{g}-y_{p}\right)^{2}+\left(z_{g}-z_{p}\right)^{2}} / v .\end{array}$ 10.11720/wtyht.2023.1414.F0003 图3 全聚焦成像示意<sup>[<xref ref-type="bibr" rid="b14">14</xref>]</sup> Schematic diagram of TFM Fig.3 ![]()
则双程传播总时间t =ts +tg . ...
超声相控阵全聚焦成像算法比较分析
1
2021
... 如
图3 所示,以面阵中心为原点建立直角坐标系,
x 、
y 为面阵行、列方向;
z 为介质方向;成像点
P 坐标为(
xp ,
yp ,
zp );发射阵元
S 中心点坐标为(
xs ,
ys ,
zs );接收阵元
G 中心坐标为(
xg ,
yg ,
zg ),则声波从发射阵元
S 到成像点
P 的传播时间
ts 和成像点
P 到接收阵元
G 的传播时间
tg 分别为:
(1) $\begin{array}{l}t_{\mathrm{s}}=\sqrt{\left(x_{s}-x_{p}\right)^{2}+\left(y_{s}-y_{p}\right)^{2}+\left(z_{s}-z_{p}\right)^{2}} / v, \\t_{\mathrm{g}}=\sqrt{\left(x_{g}-x_{p}\right)^{2}+\left(y_{g}-y_{p}\right)^{2}+\left(z_{g}-z_{p}\right)^{2}} / v .\end{array}$ 10.11720/wtyht.2023.1414.F0003 图3 全聚焦成像示意<sup>[<xref ref-type="bibr" rid="b14">14</xref>]</sup> Schematic diagram of TFM Fig.3 ![]()
则双程传播总时间t =ts +tg . ...
3
2012
... 快速步进法(fast marching method,FMM)基于程函方程计算波场传播时间,本文利用程函方程求解平面阵中所有阵元同步激发时的平面波传播时间.三维情况下程函方程[15 ] 为 ...
... FMM方法使用迎风差分格式和窄带法求解程函方程,式(4)使用迎风有限差分格式[15 ] 为 ...
... 式中: D i , j , k - x 、 D i , j , k + x 、 D i , j , k - y 、 D i , j , k + y 、 D i , j , k - z 、 D i , j , k + z t 在网格节点i 、j 、k 处在x 、y 、z 方向向前和向后的差分算子.一阶迎风差分算子[15 ] 为: ...
3
2012
... 快速步进法(fast marching method,FMM)基于程函方程计算波场传播时间,本文利用程函方程求解平面阵中所有阵元同步激发时的平面波传播时间.三维情况下程函方程[15 ] 为 ...
... FMM方法使用迎风差分格式和窄带法求解程函方程,式(4)使用迎风有限差分格式[15 ] 为 ...
... 式中: D i , j , k - x 、 D i , j , k + x 、 D i , j , k - y 、 D i , j , k + y 、 D i , j , k - z 、 D i , j , k + z t 在网格节点i 、j 、k 处在x 、y 、z 方向向前和向后的差分算子.一阶迎风差分算子[15 ] 为: ...
相控阵超声检测技术中的全聚焦成像算法及其校准研究
6
2015
... 对平面阵数据中所有接收记录R (m ,n )中索引插值求得t 时刻的振幅值累加求和可得到成像点P时刻的成像幅值I p ,计算公式[16 ] 如下: ...
... 则线阵元指向性函数[16 ] 为 ...
... 当校正接收波场时,采用单阵元指向性校正公式[16 ] : ...
... 由面振源发射声波到成像点P处的声波衰减系数[16 ] 为 ...
... 总的校准系数[16 ] 可表示为 ...
... 校准后的全聚焦公式[16 ] 为: ...
相控阵超声检测技术中的全聚焦成像算法及其校准研究
6
2015
... 对平面阵数据中所有接收记录R (m ,n )中索引插值求得t 时刻的振幅值累加求和可得到成像点P时刻的成像幅值I p ,计算公式[16 ] 如下: ...
... 则线阵元指向性函数[16 ] 为 ...
... 当校正接收波场时,采用单阵元指向性校正公式[16 ] : ...
... 由面振源发射声波到成像点P处的声波衰减系数[16 ] 为 ...
... 总的校准系数[16 ] 可表示为 ...
... 校准后的全聚焦公式[16 ] 为: ...
线阵组合平面阵的指向性研究
2
2011
... 式中:k 为波数,k =2π/λ ,对于均匀的线阵,其指向性函数[17 ] 为 ...
... 式中:M 为面阵的行数;d 1 为线阵元之间的间距.复合面阵指向性函数[17 ] 为 ...
线阵组合平面阵的指向性研究
2
2011
... 式中:k 为波数,k =2π/λ ,对于均匀的线阵,其指向性函数[17 ] 为 ...
... 式中:M 为面阵的行数;d 1 为线阵元之间的间距.复合面阵指向性函数[17 ] 为 ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}