0 引言
重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率。重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] 。20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] 。目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] 。
地球表面重力梯度异常信号非常微弱,其幅值大约在3 500~4 500 Eu(重力梯度单位,1 Eu=10-9 /s2 ),地下矿藏引起的重力梯度异常更小,一般在10 Eu左右,重力梯度仪如果能够实现探矿能力,梯度仪噪声密度水平不能超过14 Eu/H z [7 -8 ] 。旋转加速度计重力梯度仪是由多种机械装置组成,加速度计性能、加速度计安装精度、旋转机构稳定性、温控性能、平台稳定性、初始相位角精确性等因素都会对重力梯度信号造成较大影响,且直接体现在重力梯度仪输出信号上。重力梯度信号中含有的噪声会对重力梯度的解调精度带来严重影响,其中,在航空重力梯度仪实时重力梯度测量过程中,实时获取准确的解调相位角非常重要。本文针对现有重力梯度仪结构和信号特点,经过认真研究和反复实验测试,提出了一种航空重力梯度实时解调方法,首先采用FIR数字带通滤波器对重力梯度仪输出信号进行滤波处理,然后对带通滤波器输出信号进行解调相位角解算,得到实时准确的初始相位角,通过半实物仿真实验验证,证实采用本文提出的实时重力梯度解调方法可以进一步提高航空重力梯度测量精度。
1 旋转加速度计重力梯度仪工作原理
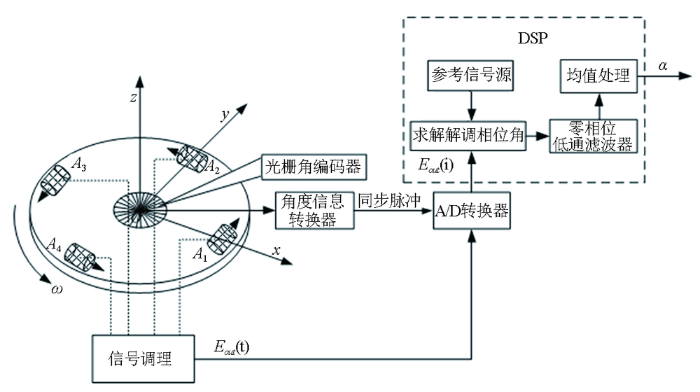
将4只高精度加速度计(A )对称安装在慢速旋转圆盘上,其敏感轴方向沿着圆盘切线方向且相互正交,相对两只加速度计敏感轴方向相反,并且与圆盘旋转轴垂直,各加速度计质量中心到圆盘中心的距离相等,圆盘以固定角频率旋转,相对两只加速度计输出信号相加再相减,可以降低圆盘平动加速度和旋转角加速度对重力梯度信号的影响。对重力梯度仪输出信号进行滤波和解调,就可以得到重力梯度分量,为了实时获取圆盘旋转角度用于重力梯度解算,在圆盘中心位置处放置高精密光栅角编码器。旋转加速度计重力梯度仪测量原理如图1 所示。
图1
图1
旋转加速度计重力梯度仪测量原理
Fig.1
Schematic of the rotating accelerometer gravity gradiometer
2 重力梯度解调相位角分析
重力梯度仪样机是由复杂机械结构、电气线路和控制算法等构成的高精密测量仪器。由于重力梯度仪所处的环境非常恶劣,如果直接对输出信号进行重力梯度解调,必然会引入额外的干扰,导致重力梯度解调过程中造成数据的不准确,因此,在进行重力梯度信号解调前,需要实时确定出精确的解调相位角。重力梯度解调相位角结构如图2 所示。
图2
图2
重力梯度解调相位角结构
Fig.2
Schematic of the gravity gradient demodulation phase angle
4只加速度计输出信号经过信号调理处理,得到模拟信号E o u t ( t ) i -1)Δt 时刻数字信号E o u t ( i ) [9 ] :
(1) E o u t ( i ) = A k s i n [ ( 2 k + 1 ) ( ω Δ t ( i - 1 ) + α - θ ) ] + B k c o s [ ( 2 k + 1 ) ( ω Δ t ( i - 1 ) + α - θ ) ] + C k s i n [ ( 2 k + 2 ) ( ω Δ t ( i - 1 ) + α - θ ) ] + D ω · α = φ - ψ
式中:Ak 、Bk 分别为2k +1次谐波正弦、余弦信号幅值;Ck 为2k +2次谐波信号幅值;D 为圆盘旋转角加速度幅值;α φ φ A 1 与重力梯度测量坐标系x 轴之间的初始夹角;θ Δt 为采样时间;ω ω ·
参考信号源数字正余弦信号,它由DSP发出[9 ] ,其表达式为:
(2) S s ( i , j ) = s i n 2 [ ω Δ t ( i - 1 ) + ϑ j ] S c ( i , j ) = c o s 2 [ ω Δ t ( i - 1 ) + ζ j ]
式中:ϑ j ζ j j 次的修正角。
利用参考信号源数字正余弦信号对A/D转换器的输出信号进行2倍频幅值解调,通过改变其初始相角直到得到最大的幅值为止,最终的初始相角即为重力梯度解调相位角[9 ] ,其计算表达式为:
(3) ϑ q = ϑ i m a x Σ k = N q - N + 1 N q E o u t ( k ) S s ( k , i ) ζ q = ζ i m a x Σ k = N q - N + 1 N q E o u t ( k ) S c ( k , i )
式中: N 为圆盘每旋转一圈角度信息转换器输出的脉冲数,ϑ q ζ q q 次得到的重力梯度解调相位角;对得到的重力梯度解调相位角ϑ q ζ q α
3 重力梯度实时解调分析
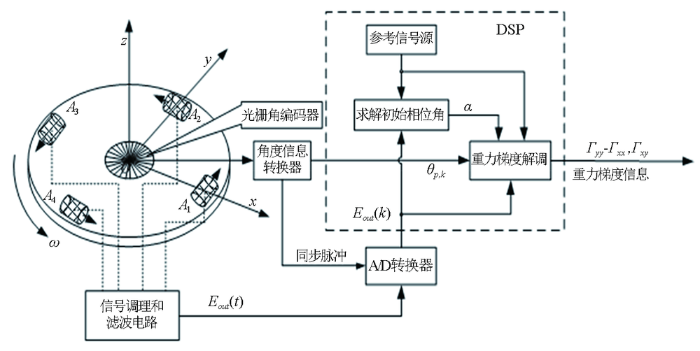
为了实现航空重力梯度实时测量,在求解出解调相位角的基础上,添加重力梯度解调部分[10 ] ,结构图如图3 所示。
图3
图3
航空重力梯度仪实时重力梯度解调结构
Fig.3
Structure of the real-time gravity gradient demodulation for the airborne gravity gradiometer
将4只加速度计输出信号经过信号调理和滤波电路进行处理,得到模拟信号E o u t ( t ) E o u t ( t ) k -1)Δt 时刻数字信号E o u t ( t ) [10 ] ,其表达式为
(4) E o u t ( k ) = 2 K I K R ( Γ y y - Γ x x ) s i n 2 [ ω Δ t ( k - 1 ) - α ] + 2 α x y c o s 2 [ ω Δ t ( k - 1 ) - α ]
式中:k 为数据序列索引; K 为系统信号放大增益; Δt 为采样时间; KI 为加速度计标度因数; R 为圆盘半径; ω α Гxx 为x 轴上的重力加速度分量在x 轴方向上的空间导数; Гyy 为y 轴上的重力加速度分量在y 轴方向上的空间导数; (Гyy - Гxx Гyy 与Гxx 之差; Гxy 为x (y )轴上的重力加速度分量在y (x )轴方向上的空间导数。
圆盘光栅编码器上的角度信息转换器实时输出圆盘角位置信息为θ p , k θ p , k
(5) ( Г y y - Г x x ) ( g p s , Δ t p k , p , k ) = Σ p = 1 M Σ k = p N + p - 1 E ( k ) s i n [ 2 ω Δ t ( k - p ) - α + 2 θ p , k ] M N R K K I Г x y ( g p s , Δ t p k , p , k ) = Σ p = 1 M Σ k = p N + p - 1 E ( k ) c o s [ 2 ω Δ t ( k - p ) - α + 2 θ p , k ] 2 M N R K K I
式中:q M 为圆盘旋转总圈数; gps 为GPS提供的位置信息。
4 仿真验证
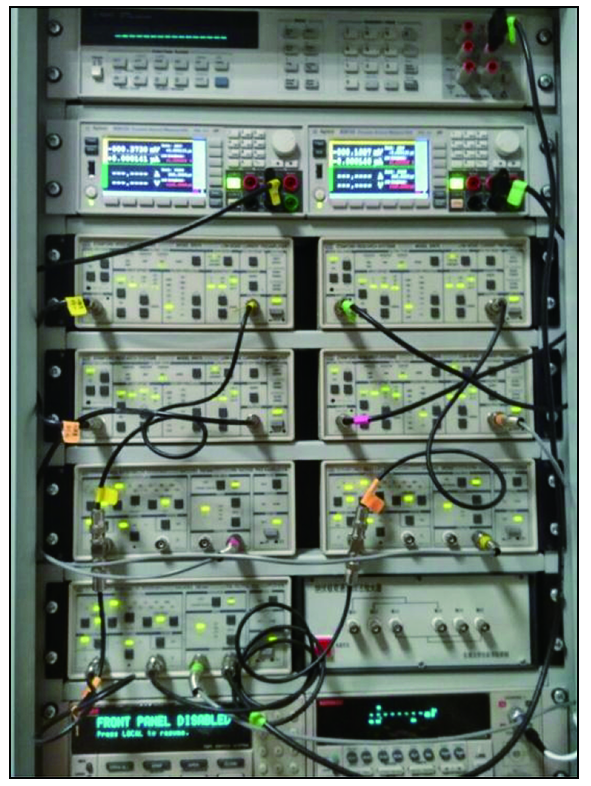
根据旋转加速度计重力梯度仪工作原理,采用高性能计算机、可编程高精度电流源、低噪声电流放大器、低噪声电压放大器、多路切换开关和高精度数字电压表等仪器组建了重力梯度半实物仿真分析系统。计算机把仿真数据发送给仿真分析系统,转换为接近真实的重力梯度仪工作环境下的重力梯度信号,通过改变各种实验参数和实验数据,可以全方位模拟重力梯度信号,有助于进一步对重力梯度仪的信号特征、误差分析、加速度计标度因子反馈调整算法以及信号处理方法等进行详细研究[ 11 ] 图4 所示。
图4
图4
重力梯度仪半物理仿真系统实物
Fig.4
Hardware-in-the-loop simulation platform of the gravity gradiometer
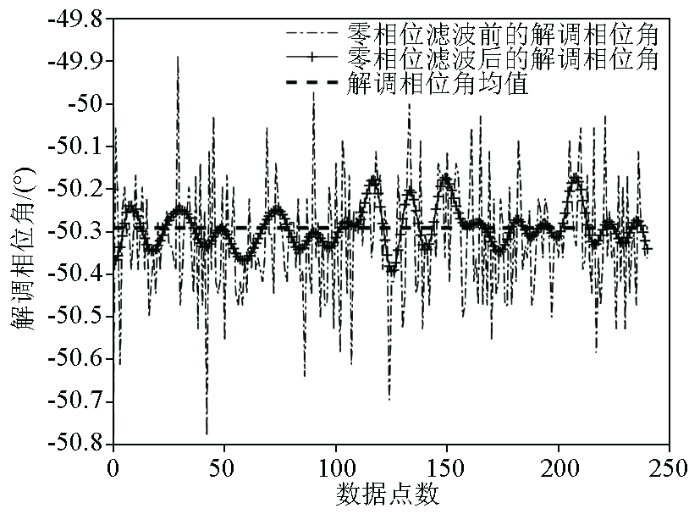
设定圆盘基线距离为1 m,加速度计标度因数为32 mA/g,重力加速度为9.81 m/s2 ,圆盘旋转周期为20 s,采样率为2 Hz,初始时刻,加速度计A 1 与x 轴之间的夹角为0°,环境物体引起的方位角为0°,对重力梯度信号进行数据采集并处理,角度变动步长为0.01°,解调相位角结果如图5 所示。从图5 中可以看到,重力梯度解调相位角在-50.3°左右,零相位滤波处理前的解调相位角波动较大,标准差为0.14°,通过零相位滤波处理后降低了波动范围,标准差变为0.046°,最后做均值处理,得到重力梯度解调相位角均值为-50.29°。如果采用0°初始相位角作为重力梯度解调相位角,则会导致较大的重力梯度测量误差,从而影响重力梯度测量精度[10 ] 。
图5
图5
重力梯度解调相位角在零相位滤波前后比较波形
Fig.5
Comparison of gravity gradient demodulation phase angle before and after zero-phase filtering
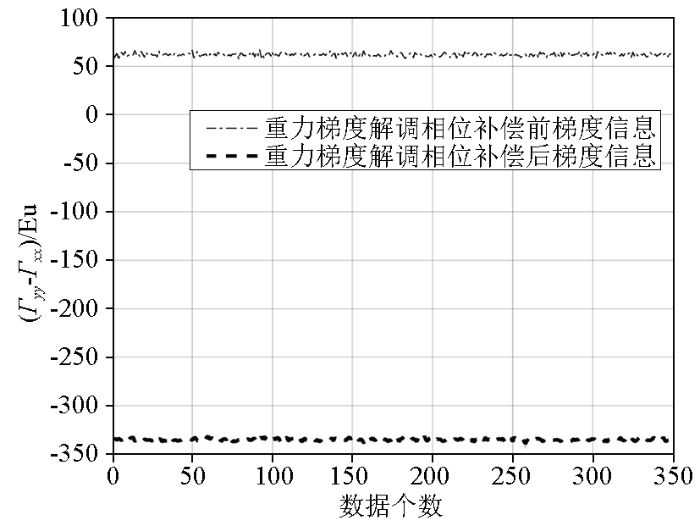
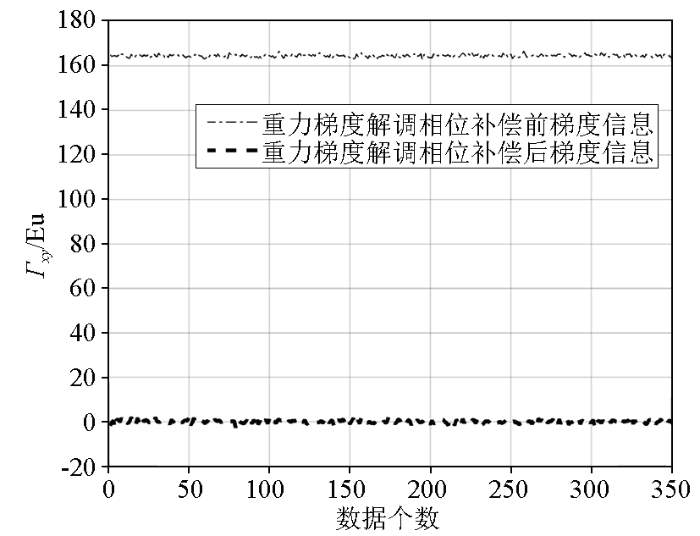
通过计算得到该环境物体引起的重力梯度分量(Гyy -Гxx )和Гxy 的理论值分别为-335 Eu和0 Eu,如果不做重力梯度解调相位角处理,采用0°初始相位角作为重力梯度解调相位角,解调得到的重力梯度分量(Гyy -Гxx )和Гxy 分别为61.89 Eu和164.62 Eu,与理论梯度值之间的误差达到了几百Eu,因此直接对原始重力梯度数据解调会产生非常大的测量误差,无法进行航空重力梯度测量;若采用计算得到的解调相位角作为重力梯度解调初始相位角对重力梯度信号进行解调,解调得到重力梯度分量(Гyy -Гxx )和Гxy 分别为-335.008 5 Eu和0.000 55 Eu,与理论梯度值之间的误差小于0.01 Eu,能够满足航空重力梯度测量需求,重力梯度解调相位补偿前后的梯度信息比较如图6 、图7 所示。
图6
图6
相位补偿前后的梯度信息(Гyy -Гxx )比较的波形
Fig.6
Comparison of the gradient component (Гyy -Гxx ) before and after phase compensation
图7
图7
相位补偿前后的梯度信息Гxy 比较的波形
Fig.7
Comparison of the gradient component Гxy before and after phase compensation
5 结论
本文针对航空重力梯度仪在测量过程中解调相位角对重力梯度测量精度的影响,提出了实时确定解调相位角和重力梯度解调求解的方法。首先提出了解调相位角的确定方法和求解算式;然后给出了实时重力梯度解调算式;接着利用解调相位角对重力梯度仪输出数据进行实时重力梯度解调,得到更高精度的重力梯度数据;最后为了验证所提方法的有效性,在重力梯度半物理仿真系统上进行半物理仿真实验测试,仿真结果表明,所给的初始相位角解算式和重力梯度实时解调算式能够明显提高重力梯度测量精度,可以为重力梯度仪的研制提供技术参考。
参考文献
View Option
[1]
钱学武 , 蔡体菁 , 尹航 . 一种旋转加速度计重力梯度仪重力梯度解调方法
[J]. 物探与化探 , 2015 , 39 (S1 ):80 -83 .
[本文引用: 1]
Qian X W Cai T J Yin H A gravity gradient demodulation method for rotating accelerometer gravity gradiometer
[J]. Geophysical and Geochemical Exploration , 2015 , 39 (S1 ):80 -83 .
[本文引用: 1]
[2]
蔡体菁 , 钱学武 , 丁昊 . 旋转加速度计重力梯度仪重力梯度信号仿真
[J]. 物探与化探 , 2015 , 39 (S1 ):80 -83 .
[本文引用: 1]
Cai T J Qian X W Ding H Signal simulation of gravity gradient for gravity gradiometer of rotating accelerometer
[J]. Geophysical and Geochemical Exploration , 2015 , 39 (S1 ): 80 -83 .
[本文引用: 1]
[3]
Difrancesco D Advances and challenges in the development and deployment of gravity gradiometer systems
[C]// EGM 2007 International Workshop, Innovation in EM, Grav. and Mag.Methods:A new Perspective for Exploration , Italy : Capri , 2007 .
[本文引用: 1]
[4]
Roberts D Chowdhury P R Lowe S J et al . Airborne gravity gradiometer surveying of petroleum systems under Lake Tanganyika, Tanzania
[J]. Exploration Geophysics , 2016 , 47 (3 ):228 -236 .
DOI:10.1071/EG15075
URL
[本文引用: 1]
[5]
DiFrancesco D Meyer T Christensen A et al . Gravity gradiometry-today and tomorrow
[C]// 11th SAGA Biennial Technical Meeting and Exhibition , 2009 .
[本文引用: 1]
[6]
Lococo J J The Falcon airborne gravity gradiometer for engineering applications
[C]// Environment and Engineering Geophysical Society , 2010 .
[本文引用: 1]
[7]
Yamanaka H HeliFalcon© airborne gravity gradiometer data acquisition in rugged terrain
[C]// Global Meeting Abstracts Society of Exploration Geophysicists , 2013 .
[本文引用: 1]
[8]
钱学武 , 蔡体菁 . 旋转加速度计重力梯度仪数据处理方法
[J]. 东南大学学报:自然科学版 , 2016 , 46 (4 ):708 -712 .
[本文引用: 1]
Qian X W Cai T J Data processing methods for rotating accelerometer gravity gradiometer
[J]. Journal of Southeast University Natural Science Edition , 2016 , 46 (4 ): 708 -712 .
[本文引用: 1]
[9]
钱学武 , 赵立业 . 旋转加速度计重力梯度仪重力梯度解调相位角确定方法及装置
[P]. 中国专利, CN 111624671A . 2020 .09.04
[本文引用: 3]
Qian X W Zhao L Y Method and device for determining phase angle of gravity gradient demodulation for rotating accelerometer gravity gradiometer
[P]. Patent, CN 111624671A . 2020 .09.04.
[本文引用: 3]
[10]
钱学武 , 赵立业 . 一种航空重力梯度仪实时重力梯度解调方法及装置
[P]. 中国专利, CN 111650664A . 2020 .09.11.
[本文引用: 3]
Qian X W Zhao L Y Method and device of real-time gravity gradient demodulation for an airborne gravity gradiometer
[P]. Patent, CN 111650664A . 2020 .09.11.
[本文引用: 3]
[11]
蔡体菁 , 钱学武 , 丁昊 . 旋转加速度计重力梯度仪重力梯度信号仿真
[J]. 物探与化探 , 2015 , 39 (S1 ): 76 -79 .
Cai T J Qian X W Ding H Signal simulation of gravity gradient for gravity gradiometer of rotating accelerometer
[J]. Geophysical and Geochemical Exploration , 2015 , 39 (S1 ): 76 -79 .
一种旋转加速度计重力梯度仪重力梯度解调方法
1
2015
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
一种旋转加速度计重力梯度仪重力梯度解调方法
1
2015
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
旋转加速度计重力梯度仪重力梯度信号仿真
1
2015
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
旋转加速度计重力梯度仪重力梯度信号仿真
1
2015
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
Advances and challenges in the development and deployment of gravity gradiometer systems
1
2007
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
Airborne gravity gradiometer surveying of petroleum systems under Lake Tanganyika, Tanzania
1
2016
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
Gravity gradiometry-today and tomorrow
1
2009
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
The Falcon airborne gravity gradiometer for engineering applications
1
2010
... 重力梯度是重力加速度的空间微分,能够反映场源体更多的细节,具有比重力更高的分辨率.重力梯度测量对于空间科学、地球科学、地质科学的发展以及资源勘探、惯性导航等研究具有非常重要的意义[1 ⇓ ⇓ -4 ] .20世纪末,澳大利亚BHP公司和美国Lockheed Martin公司合作共同研制了基于加速度计的部分张量航空重力梯度测量系统FALCON,随后Lockheed Martin公司研制了全张量重力梯度测量系统Air-FTGTM,英国ARKeX公司采用Lockheed Martin公司重力梯度专利技术开发了全张量重力梯度测量系统FTGeX,这3种重力梯度测量系统经过不断测试和改进,证实了其在能源勘探方面的巨大优势,并取得了很好效果[5 ] .目前,国际上正在研发的重力梯度仪主要包括旋转加速度计重力梯度仪、超导重力梯度仪、冷原子重力梯度仪、静电重力梯度仪,还有最近兴起的基于微机械加工(MEMS)技术的重力梯度仪等,其中旋转加速度计重力梯度仪是目前唯一成功用于机载/船载动基座上的重力梯度测量仪器[6 ] . ...
HeliFalcon? airborne gravity gradiometer data acquisition in rugged terrain
1
2013
... 地球表面重力梯度异常信号非常微弱,其幅值大约在3 500~4 500 Eu(重力梯度单位,1 Eu=10-9 /s2 ),地下矿藏引起的重力梯度异常更小,一般在10 Eu左右,重力梯度仪如果能够实现探矿能力,梯度仪噪声密度水平不能超过14 Eu/ H z [7 -8 ] .旋转加速度计重力梯度仪是由多种机械装置组成,加速度计性能、加速度计安装精度、旋转机构稳定性、温控性能、平台稳定性、初始相位角精确性等因素都会对重力梯度信号造成较大影响,且直接体现在重力梯度仪输出信号上.重力梯度信号中含有的噪声会对重力梯度的解调精度带来严重影响,其中,在航空重力梯度仪实时重力梯度测量过程中,实时获取准确的解调相位角非常重要.本文针对现有重力梯度仪结构和信号特点,经过认真研究和反复实验测试,提出了一种航空重力梯度实时解调方法,首先采用FIR数字带通滤波器对重力梯度仪输出信号进行滤波处理,然后对带通滤波器输出信号进行解调相位角解算,得到实时准确的初始相位角,通过半实物仿真实验验证,证实采用本文提出的实时重力梯度解调方法可以进一步提高航空重力梯度测量精度. ...
旋转加速度计重力梯度仪数据处理方法
1
2016
... 地球表面重力梯度异常信号非常微弱,其幅值大约在3 500~4 500 Eu(重力梯度单位,1 Eu=10-9 /s2 ),地下矿藏引起的重力梯度异常更小,一般在10 Eu左右,重力梯度仪如果能够实现探矿能力,梯度仪噪声密度水平不能超过14 Eu/ H z [7 -8 ] .旋转加速度计重力梯度仪是由多种机械装置组成,加速度计性能、加速度计安装精度、旋转机构稳定性、温控性能、平台稳定性、初始相位角精确性等因素都会对重力梯度信号造成较大影响,且直接体现在重力梯度仪输出信号上.重力梯度信号中含有的噪声会对重力梯度的解调精度带来严重影响,其中,在航空重力梯度仪实时重力梯度测量过程中,实时获取准确的解调相位角非常重要.本文针对现有重力梯度仪结构和信号特点,经过认真研究和反复实验测试,提出了一种航空重力梯度实时解调方法,首先采用FIR数字带通滤波器对重力梯度仪输出信号进行滤波处理,然后对带通滤波器输出信号进行解调相位角解算,得到实时准确的初始相位角,通过半实物仿真实验验证,证实采用本文提出的实时重力梯度解调方法可以进一步提高航空重力梯度测量精度. ...
旋转加速度计重力梯度仪数据处理方法
1
2016
... 地球表面重力梯度异常信号非常微弱,其幅值大约在3 500~4 500 Eu(重力梯度单位,1 Eu=10-9 /s2 ),地下矿藏引起的重力梯度异常更小,一般在10 Eu左右,重力梯度仪如果能够实现探矿能力,梯度仪噪声密度水平不能超过14 Eu/ H z [7 -8 ] .旋转加速度计重力梯度仪是由多种机械装置组成,加速度计性能、加速度计安装精度、旋转机构稳定性、温控性能、平台稳定性、初始相位角精确性等因素都会对重力梯度信号造成较大影响,且直接体现在重力梯度仪输出信号上.重力梯度信号中含有的噪声会对重力梯度的解调精度带来严重影响,其中,在航空重力梯度仪实时重力梯度测量过程中,实时获取准确的解调相位角非常重要.本文针对现有重力梯度仪结构和信号特点,经过认真研究和反复实验测试,提出了一种航空重力梯度实时解调方法,首先采用FIR数字带通滤波器对重力梯度仪输出信号进行滤波处理,然后对带通滤波器输出信号进行解调相位角解算,得到实时准确的初始相位角,通过半实物仿真实验验证,证实采用本文提出的实时重力梯度解调方法可以进一步提高航空重力梯度测量精度. ...
旋转加速度计重力梯度仪重力梯度解调相位角确定方法及装置
3
2020
... 4只加速度计输出信号经过信号调理处理,得到模拟信号 E o u t ( t ) i -1)Δt 时刻数字信号 E o u t ( i ) [9 ] : ...
... 参考信号源数字正余弦信号,它由DSP发出[9 ] ,其表达式为: ...
... 利用参考信号源数字正余弦信号对A/D转换器的输出信号进行2倍频幅值解调,通过改变其初始相角直到得到最大的幅值为止,最终的初始相角即为重力梯度解调相位角[9 ] ,其计算表达式为: ...
旋转加速度计重力梯度仪重力梯度解调相位角确定方法及装置
3
2020
... 4只加速度计输出信号经过信号调理处理,得到模拟信号 E o u t ( t ) i -1)Δt 时刻数字信号 E o u t ( i ) [9 ] : ...
... 参考信号源数字正余弦信号,它由DSP发出[9 ] ,其表达式为: ...
... 利用参考信号源数字正余弦信号对A/D转换器的输出信号进行2倍频幅值解调,通过改变其初始相角直到得到最大的幅值为止,最终的初始相角即为重力梯度解调相位角[9 ] ,其计算表达式为: ...
一种航空重力梯度仪实时重力梯度解调方法及装置
3
2020
... 为了实现航空重力梯度实时测量,在求解出解调相位角的基础上,添加重力梯度解调部分[10 ] ,结构图如图3 所示. ...
... 将4只加速度计输出信号经过信号调理和滤波电路进行处理,得到模拟信号 E o u t ( t ) E o u t ( t ) k -1)Δt 时刻数字信号 E o u t ( t ) [10 ] ,其表达式为 ...
... 设定圆盘基线距离为1 m,加速度计标度因数为32 mA/g,重力加速度为9.81 m/s2 ,圆盘旋转周期为20 s,采样率为2 Hz,初始时刻,加速度计A 1 与x 轴之间的夹角为0°,环境物体引起的方位角为0°,对重力梯度信号进行数据采集并处理,角度变动步长为0.01°,解调相位角结果如图5 所示.从图5 中可以看到,重力梯度解调相位角在-50.3°左右,零相位滤波处理前的解调相位角波动较大,标准差为0.14°,通过零相位滤波处理后降低了波动范围,标准差变为0.046°,最后做均值处理,得到重力梯度解调相位角均值为-50.29°.如果采用0°初始相位角作为重力梯度解调相位角,则会导致较大的重力梯度测量误差,从而影响重力梯度测量精度[10 ] . ...
一种航空重力梯度仪实时重力梯度解调方法及装置
3
2020
... 为了实现航空重力梯度实时测量,在求解出解调相位角的基础上,添加重力梯度解调部分[10 ] ,结构图如图3 所示. ...
... 将4只加速度计输出信号经过信号调理和滤波电路进行处理,得到模拟信号 E o u t ( t ) E o u t ( t ) k -1)Δt 时刻数字信号 E o u t ( t ) [10 ] ,其表达式为 ...
... 设定圆盘基线距离为1 m,加速度计标度因数为32 mA/g,重力加速度为9.81 m/s2 ,圆盘旋转周期为20 s,采样率为2 Hz,初始时刻,加速度计A 1 与x 轴之间的夹角为0°,环境物体引起的方位角为0°,对重力梯度信号进行数据采集并处理,角度变动步长为0.01°,解调相位角结果如图5 所示.从图5 中可以看到,重力梯度解调相位角在-50.3°左右,零相位滤波处理前的解调相位角波动较大,标准差为0.14°,通过零相位滤波处理后降低了波动范围,标准差变为0.046°,最后做均值处理,得到重力梯度解调相位角均值为-50.29°.如果采用0°初始相位角作为重力梯度解调相位角,则会导致较大的重力梯度测量误差,从而影响重力梯度测量精度[10 ] . ...
旋转加速度计重力梯度仪重力梯度信号仿真
0
2015
旋转加速度计重力梯度仪重力梯度信号仿真
0
2015




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}