

0 引言
对航空重力测量技术的研究可以追溯到20世纪50年代,但是受限于当时航空重力仪和导航系统的定位精度限制,并未得到较好的成果。直到20世纪80年代,随着全球定位系统的发展,航空重力测量技术才取得突破,先后发展出了基于不同原理的航空重力仪。目前航空重力测量系统主要有平台式和捷联式两大类,其中平台式分为双轴稳定平台式和三轴稳定平台式。基于双轴稳定平台的航空重力仪代表产品主要为美国Micro-g公司的TAGS-6、DGS公司的AT1A、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,测量精度在1×10-5 m/s2左右。基于三轴稳定平台的航空重力仪代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪和俄罗斯GT重力技术公司的GT系列航空重力仪,已经得到商业化应用,测量精度在0.6×10-5 m/s2左右。基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等,测量精度可接近1×10-5 m/s2,但到目前为止,均没有形成商业化的产品[4,5,6]。
我国航空重力测量装备早期一直依赖于进口,制约着航空重力测量技术的发展及大规模应用。在“十三五”国家重点研发计划等项目的支持下,基于原来的研究基础,中国自然资源航空物探遥感中心联合北京自动化控制设备研究所开展了平台式航空重力勘查系统的研制。该系统采用与国际上先进的AIRGrav重力仪一致的“三轴稳定平台+石英挠性加速度计重力传感器”方案[7],利用自标定技术、平台姿态误差实时估计和修正技术等实用先进手段,加上测量数据精确同步对准和数千毫伽干扰下微弱重力信息提取等处理技术,提高了航空重力测量精度,使国产平台式航空重力勘查系统测量精度达到0.6×10-5 m/s2,并跑于国外先进水平。
1 平台式航空重力勘查系统组成
研制和集成的平台式航空重力勘查系统(如图1)包括:平台式航空重力仪、DGNSS卫星接收机系统、供电显控系统、减振系统和无人值守系统、数据处理软件等。
图1
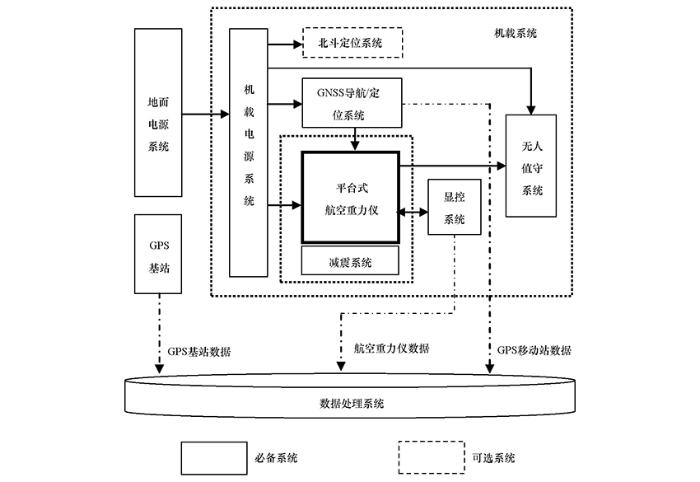
图1
平台式航空重力勘查系统组成
Fig.1
Composition diagram of platform-based airborne gravity exploration system
航空重力仪主要由三轴惯性稳定平台等构成。三轴惯性稳定平台为重力传感器提供高精度姿态基准,同时也作为重力传感器,测量地球重力场的变化。DGNSS卫星接收机系统为载体提供高精度的位置信息,进而计算出载体的速度和加速度信息。航空重力数据处理系统实现测量数据对准和各项改正,再通过数据低通滤波技术提取出微弱重力信息,实现航空重力异常解算。
2 平台式航空重力仪实现实用化
平台式航空重力仪采用“三轴稳定平台+石英挠性摆式加速度计”的设计方案,利用2个二自由度动力调谐陀螺和3个石英挠性加速度计构成三轴惯性稳定平台与重力测量装置,其组成如图2所示。
图2
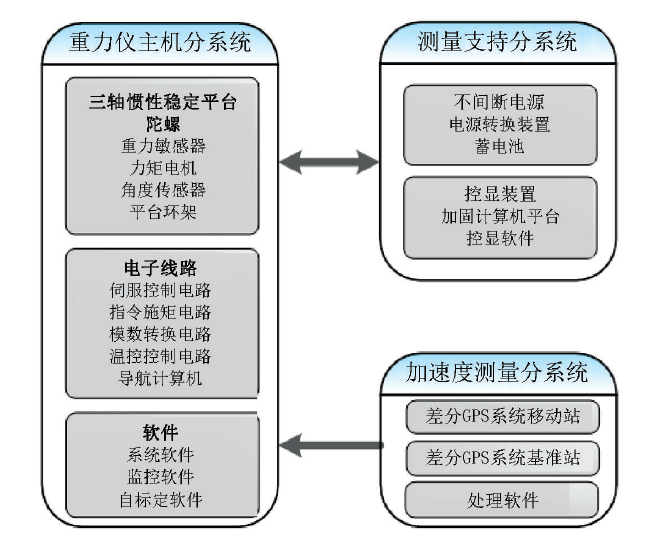
图2
平台式航空重力仪组成
Fig.2
Composition block diagram of platform-based airborne gravity
三轴惯性稳定平台的特有优点和作用:有效隔离飞机载体在飞行测量过程中的角运动,使垂向重力传感器(垂向加速度计)在飞行测量中保持垂向,水平重力传感器保持水平,并为重力传感器提供良好的温度、振动和电磁环境,以使重力传感器在实际应用环境下可以达到重力仪要求的测量精度。同时,利用稳定平台的环架系统实现重力仪的高精度现场参数自标定技术,提高重力仪的测量精度和性能。
本次研究主要实现了以下两项实用化技术:
1) 重力仪现场自标定技术
平台式航空重力仪中的陀螺和加速度计的误差参数及其安装误差等在外界环境载荷作用下会随时间发生变化,在其变化到一定程度时将会严重影响重力传感器的姿态保持精度,为此必须定期对这些参数进行标定补偿。
在静基座条件下,三轴惯性稳定平台可利用地球自转角速率和重力两个物理量作为输入,通过使陀螺和加速度计依次旋转到不同位置来实现对这些参数的自标定。但是在机载晃动条件下,地球自转角速率和重力均受到载体晃动的干扰,参数自标定将难于实现。为了实现重力仪现场的自标定,研究中提出了六位置晃动基座开环自标定方法,利用高精度三轴惯性稳定平台在野外现场对航空重力仪进行自标定。
自标定方法采用六位置开环算法。六个位置的具体指向:第一位置(外环:-180°,内环:-90°);第二位置(外环:-90°,内环:-90°);第三位置(外环:-90°,内环:-180°);第四位置(外环:-90°,内环:-270°);第五位置(外环:-90°,内环:0°);第六位置(外环:0°,内环:0°)。在每个位置上,自标定算法包含5个模块:粗对准模块、导航模块、计算中间变量、计算必须的变量和校正算法,其流程如图3。
图3
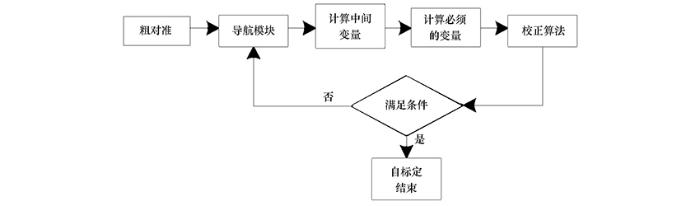
通过六位置晃动基座开环自标定方法,对影响重力测量精度较大且随时间变化较快的18项陀螺和加速度计参数进行自标定和补偿,解决了机载条件下的晃动干扰问题,实现了高精度三轴惯性稳定平台在野外现场对航空重力仪进行自标定,从而提高稳定平台长时间工作的姿态保持精度。
2) 平台姿态误差实时估计和修正技术
为了使重力仪的惯性稳定平台姿态在水平面内稳定精度优于10″,需要利用惯性和GNSS组合导航对平台动态误差进行实时修正,以保证平台姿态的水平失准角维持在小角度内,提高长时间惯性稳定平台水平姿态保持精度,进而提高航空重力的测量精度。
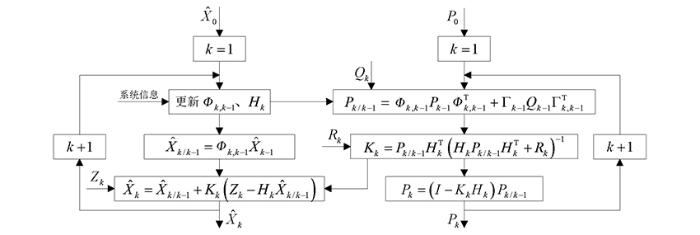
本次研究采用重力仪提供的速度信息和GNSS移动站提供的速度信息通过卡尔曼滤波的方法来实时估计平台失调角,并实时修正水平姿态。
卡尔曼滤波方程为:
卡尔曼滤波中状态变量选取为:
X = [δφ,δλ,δVn,δVu,δVe,δϕn,δϕe,▽x,▽y,▽z,εx,εy,εz]T。
式中:δφ、δλ为纬度、经度误差;δVn、δVu、δVe为北向、天向、东向速度误差;δϕn、δϕu、δϕe为姿态角误差;▽x、▽y、▽z为载体坐标系上的加速度计零偏;εx、εy、εz为载体坐标系上的陀螺漂移。
卡尔曼滤波解算框图如图4所示。在设置好初值后,根据状态方程、量程方程和滤波方程,逐步得到状态变量估计值。
图4
通过惯性和GNSS组合导航对平台动态误差进行实时修正,飞行测量过程中惯性稳定平台姿态在水平面内稳定精度优于10″,提升了航空重力测量精度。
3 航空重力数据处理精度进一步提高
图5
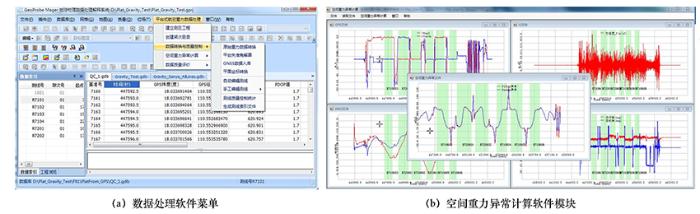
图5
平台式航空重力测量数据处理软件界面
Fig.5
Data processing software interface of platform-based airborne gravimetry
图6
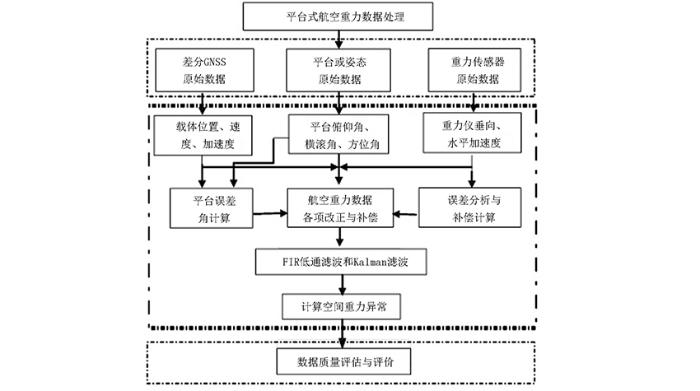
图6
平台式航空重力数据处理流程
Fig.6
Flow chart of platform-based airborne gravity data processing
航空重力数据处理软件主要由导航定位解算、航空重力各项改正和数据低通滤波等组成。导航定位解算主要是通过差分导航定位系统获得高精度的载体位置、速度和加速度信息,航空重力各项改正包括载体垂向加速度改正、厄特渥斯改正、正常场改正、高度改正和零漂改正等,再通过数据低通滤波技术提取出微弱重力信息,实现航空重力异常解算。本次研究主要解决了以下两项处理技术:
1) 测量数据精确对准技术
在航空重力测量数据和GNSS数据处理过程中,由于航空重力测量数据的采样率(通常数据采样率为100 Hz及以上)比GNSS数据采样率(通常为2 Hz)高出很多, 需要根据GNSS数据中的时间,通过对准找到相对应的航空重力测量数据,不同测量数据之间的精确对准是实现高精度航空重力测量的必经之路。
首先,以GNSS数据的整数秒选取对应的航空重力测量数据的测量时间,需保证航空重力测量数据与GNSS数据之间的时间偏差控制在10-3s之内。其次,为了将高采样率的航空重力测量数据与低采样率的GNSS数据(采样率为2 Hz)进行采样率的匹配,需要对航空重力测量数据进行下采样处理,即对航空重力测量数据进行FIR低通滤波,低通滤波之后的数据按照GNSS数据采样率进行重采样,形成与GNSS数据采样率相一致、时间相对应的航空重力新的测量数据集。
通过以上方法,实现航空重力测量数据与GNSS数据的时间对准和采样率同步,因而可获得高精度的航空重力异常。
2) 航空重力零相位低通滤波器技术
由于航空重力测量中载体的振动和飞行环境的影响,测量数据中不可避免地会包含大量高频噪声。而重力异常通常只有几十毫伽,因此需通过窗函数FIR等低通滤波器消除高频噪声。但采用FIR低通滤波器会产生相位延迟,导致滤波后重力异常相对于测量值在时间上发生平移,最终引起重力异常位置偏离真实地理位置。
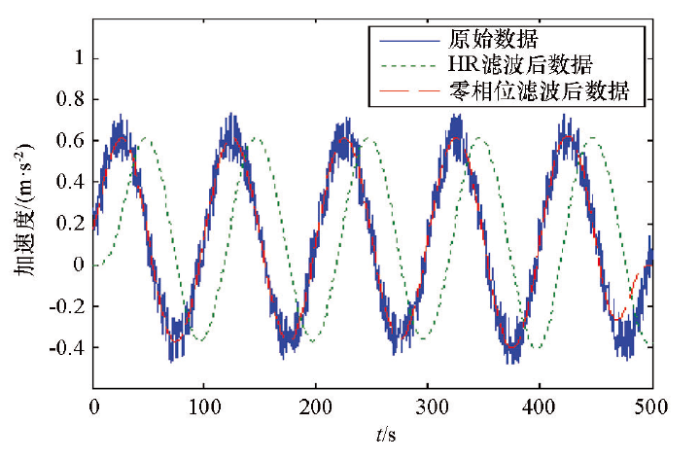
本次研究在设计低通滤波器时,采用了零相位低通滤波技术(如图7),实现“零相位”的低通滤波。
图中最后输出y(n)的傅里叶变换为:
图7

图8是零相位低通滤波前后的数据对比,从图中可以看出:采用零相位低通滤波技术,很好地消除了滤波前后数据的时间延迟。
图8
4 勘查系统测量结果与分析
2020年在某地进行了平台式航空重力勘查系统的飞行测试和区域性测量,GT-2A航空重力勘查系统已经完成了此区域的数据采集。此次飞行测量共完成了6个架次的重复线飞行和7个架次的测线飞行,所有架次飞行测量高度为GPS高度600 m平飞,飞行地速约220 km/h。
4.1 测量精度
航空重力测量内符合精度是利用重复线测试数据来评价航空重力重复测量的动态精度,反映的是各重复线测试数据相对于它们的平均场数据的符合程度。
每条重复线重力数据的均方差内符合精度计算公式(1):
式中:δij为第j条重复线公共段各点重力值Fij与该点各重复线重力值的平均值Fi(式(3))之差;m为重复线数目;n为重复线公共段数据点数。
所有重复线测试数据的内符合精度计算式为:
将重复线做出水平调整,调整后内符合精度为:
其中:每条重复线数据的水平均值为:
所有重复线的平均场数据的水平均值为:
平台式航空重力勘查系统测量的EW向重复线(10条,编号为R1001~R1010)100 s低通滤波后的航空空间重力异常内符合精度为0.583×10-5 m/s2,详见图9。
图9
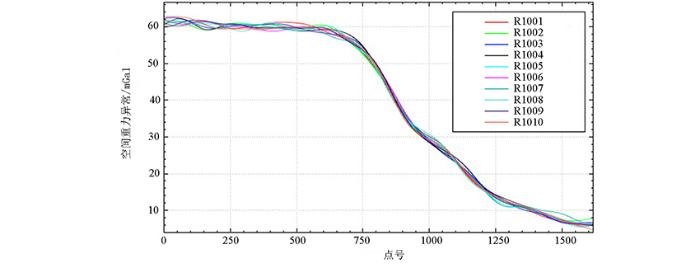
图9
东西向重复线航空空间重力异常重复测量对比(FIR低通滤波(100 s))
Fig.9
Comparison of repeated measurement of airborne space gravity anomaly along East—West repeated line(FIR low pass filter (100 s))
SN向重复线(9条,编号R2001~R2009)100 s低通滤波后的航空空间重力异常内符合精度为0.581×10-5 m/s2,详见图10。
图10
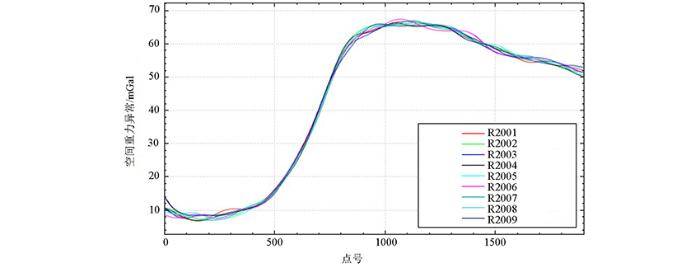
图10
南北重复线向航空空间重力异常重复测量对比(FIR低通滤波(100 s))
Fig.10
Comparison of repeated measurement of airborne space gravity anomaly along North—South repeated line(FIR low pass filter (100 s))
GT航空重力勘查系统同位置的SN向测线(6条,编号R7001~R7006)航空空间重力异常内符合精度为0.613×10-5 m/s2,详见图11。
图11
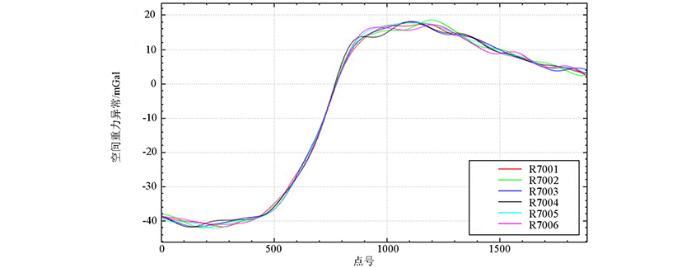
图11
GT南北向航空空间重力异常重复测量对比
Fig.11
Comparison of repeated measurement of GT North—South airborne space gravity anomaly
平台式航空重力勘查系统测量精度优于0.6×10-5 m/s2(100 s),动态测量精度高、稳定可靠。与国际先进的GT-2A航空重力勘查系统测量结果(同样100 s滤波)相比,两者具有很好的一致性,测量精度达到了国际先进水平。
4.2 测量总精度
图12
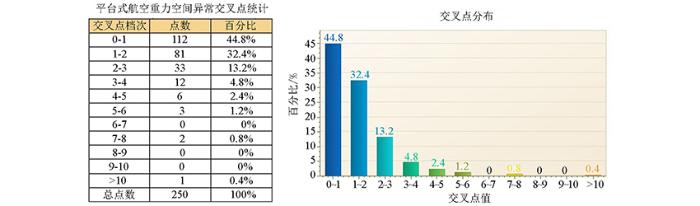
图12
平台式航空重力勘查系统原始航空空间重力测量交叉点统计
Fig.12
Intersection statistics of original space gravity anomaly of platform-based airborne gravity exploration system
图13
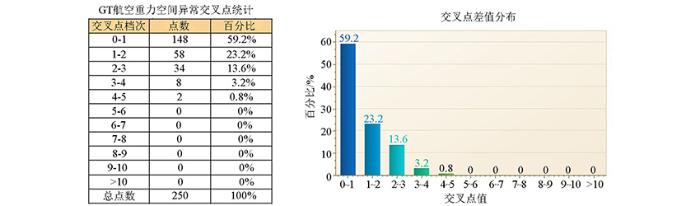
图13
GT系统原始航空空间重力测量交叉点统计
Fig.13
Intersection statistics of original space gravity anomaly of GT gravity exploration system
图14
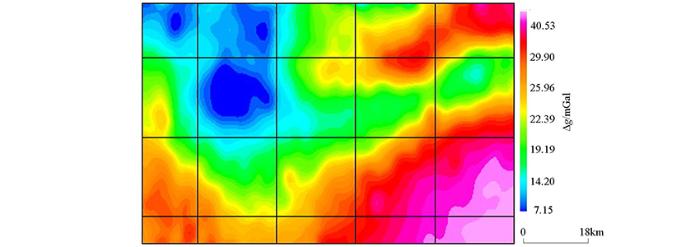
图14
平台式航空重力勘查系统原始航空空间重力异常
Fig.14
Original space gravity anomaly map of platform-based airborne gravity exploration system
图15
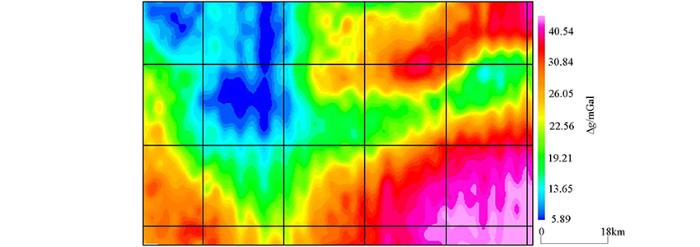
图15
GT系统原始航空空间重力异常
Fig.15
Original space gravity anomaly map of GT exploration system
5 结论
为了发展高精度、高效率航空重力测量技术,实现快速找矿突破、资源勘探增储等实际应用,研制和集成了平台式航空重力勘查系统。通过测量飞行获得的数据表明:
1) 平台式航空重力勘查系统多架次重复线飞行数据合并统计的内符合精度优于0.6×10-5 m/s2(100 s),说明勘查系统不同时间的重复线测量结果一致性好,测量结果稳定可靠。
2) 平台式航空重力勘查系统与国际先进的GT-2A航空重力勘查系统测量结果相比,两者具有很好的一致性,测量精度与引进的设备相当,勘查系统的测量精度达到了国际先进水平,并实现了实用化。
致谢:
本次平台式航空重力勘查系统的测量和数据处理工作得到了中国自然资源航空物探遥感中心相关技术人员和东南大学蔡体菁教授的大力支持,在此表示诚挚的谢意。
参考文献
我国航空重磁勘探技术现状与发展趋势
[J].
The present situation and development of airborne gravity and magnetic survey techniques in China
[J].
航空重力测量理论、方法及应用研究
[D].
Theory, method and application of aerogravimetry
[D].
海空重力测量技术进展
[J].
Progress of sea air gravimetry technology
[J].
Airborne gravimetry for geoid determination with Lacoste Romberg and Chekan gravimeters
[J].DOI:10.1134/S2075108715040069 URL [本文引用: 1]
GT-1A and GT-2A airborne gravimeters: Improvements in design, operation, and processing from 2003 to 2010
[C]//
航空/海洋重力测量仪器发展综述
[J].
Overview of the development of aeronautical/oceanic gravimetric instruments
[J].
三轴稳定平台式航空重力测量数据处理方法研究与实现
[J].
Research and implementation of data processing method for three-axis stabilized platform airborne gravity measuring system
[J].
航空重力数据的等波纹FIR 低通滤波试验
[J].
Equal-ripple FIR low-pass filtering test for airborne gravity data
[J].
航空重力测量中FIR低通滤波器的比较
[J].
Comparison of FIR low-pass filters in aerogravimetry
[J].
平台式重力仪测量数据的卡尔曼滤波处理
[J].
Processing for measurement data of platform gravimeter by Kalman filter
[J].
航空重力数据Kalman滤波平滑技术应用研究
[J].
Application of Kalman filtering smoothing technique for aeronautical gravity data
[J].
航空重力重复线测试数据质量评价方法研究
[J].
Study on the evaluation method of data quality for airborne gravity repeat line test
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}