
0 引言
感应式磁场传感器做为地球物理电磁法勘探仪器的信号接收部件已达到广泛应用[1],特别是在可控源音频大地测量(CSAMT)、音频大地电磁测量(AMT)、大地电磁测深(MT)和瞬变电磁(TEM)等方法中为提取地下弱磁场信号提供了一种可靠的工具。
感应式磁场传感器的工作原理为法拉第电磁感应定律,它将变化的磁场转变为电压量输出,输出电压量的大小和所采用的线圈的匝数、面积、被测磁场频率成正比。感应式磁场传感器主要由三部分组成:高导磁率磁棒、多匝线圈和低噪声放大器。为了提高磁场传感器的灵敏度,需要磁棒有足够的长径比(一般大于50)以达到足够大的有效导磁率,在地面上应用的磁场传感器长度都比较大,一般为800~1 400 mm,如开展三分量测量,需要分别布置三根传感器,传感器的布置方向和水平度也需要调整,在地形差的地区给野外施工带来不便,如果在浅水区根本就无法使用。
近年来,中国地质科学院地球物理地球化学勘查研究所在地质大调查项目的资助下,成功研制出应用于CSAMT和AMT的IGGE-30磁场传感器[5],其工作频率范围为:0.1 Hz~10 kHz,噪声指标在1 Hz处为0.5 pT/
本文在现有工作基础上突破常规的感应式磁场传感器设计方法,采用磁通聚集技术,该技术最早由法国学者Mansour用于磁阻磁场传感器上[6],用于增加其灵敏度;国内吉林大学邵英秋博士对此技术也开展过研究[7]。笔者通过优化磁棒结构,使得较短磁棒的有效导磁率与常规磁棒相当,从而实现小型化,把三根磁场传感器集成到一个箱体中,相互垂直布置,实现三个分量(Hx、Hy、Hz)同时测量。另外,在箱体上集成定向传感器记录三分量磁场传感器的姿态,箱体外加上防水外壳,这样即可实现在浅水区的三分量磁场测量。该三分量磁场传感器的工作范围为:0.1 Hz~10 kHz,噪声指标在1 Hz处为0.8 pT/
1 三分量感应式磁场传感器设计
感应式磁传感器的工作原理和设计方法笔者和其他学者已进行过深入阐述[8],本文将不在复述,仅对设计中不同的部分进行阐述。
1.1 主体结构设计
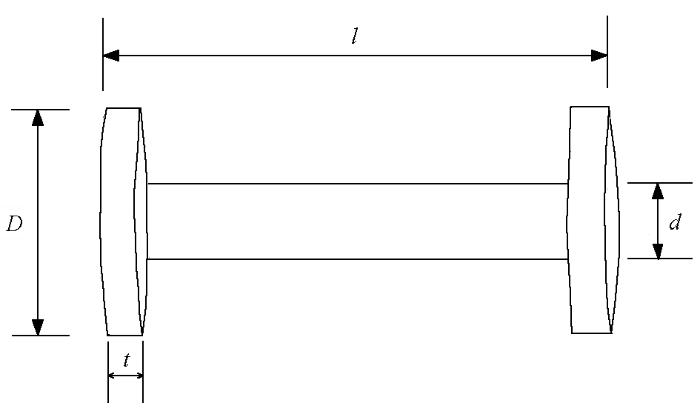
感应式磁场传感器通常由三部分组成:高导磁率磁棒、多匝线圈和低噪声前置放大器。常规的高导磁率磁棒通常采用圆柱体或长方体,其磁路是非闭合的,存在退磁场,在退磁场的作用下,有效磁导率远远小于材料初始磁导率,为满足长径比的要求,一般长度比较大,如采用常规尺寸磁棒因体积庞大无法将其集成到一个箱体内。本文采用磁通聚集技术,优化磁棒结构,使得较短磁棒的有效导磁率与常规磁棒相当,从而实现小型化。其形状如图1所示,两侧采用直径为D、厚度为t的软磁性铁氧体材料,中间部分采用直径为d、长度为(l-2t)的常规圆柱形高导磁率磁棒,和常规磁芯相比,长度较短,多匝线圈均匀绕在中间的磁棒上,该结构可有效增加磁棒的有效磁导率。
图1
磁芯的退磁因子决定其有效导磁率,同时退磁因子也是磁芯位置的函数,而磁通聚集器的设计改变了磁芯的形状,也就改变了磁芯有效导磁率的分布。从磁路分析,由于磁通聚集器的直径相对较大,使得在空间中有较大面积磁阻较低,这对磁感线起汇聚作用。在外磁场较弱的情况下,磁芯内部有效磁场可以较容易地得到提高,实现了提高有效导磁率的目的。从理论上计算带有磁通聚集器磁芯的有效导磁率是十分困难的,可以通过有限元软件Comsol来计算出理论结果。根据磁棒的导磁率公式:
式中:μapp为磁棒有效导磁率,μr为磁棒材料的初始磁导率,N为退磁因子(与磁棒的长径比有关)。磁芯材料采用高导磁率的坡莫合金,磁棒长度为200 mm,直径为12 mm,在中心处绕制线圈 3 000 匝,此时测量线圈的电感为10 H。磁通聚集器采用直径为100 mm,厚度为10 mm的铁氧体软磁性材料,测量线圈的电感为40 H,采用磁通聚集器后电感值提高了4倍,即有效导磁率提高了4倍,满足设计要求。
线圈采用分段绕制方式,分4段,3 000匝/段,总匝数为12 000匝,均匀绕制在磁棒表面,有效降低其分布电容,提高工作频率范围。
图2
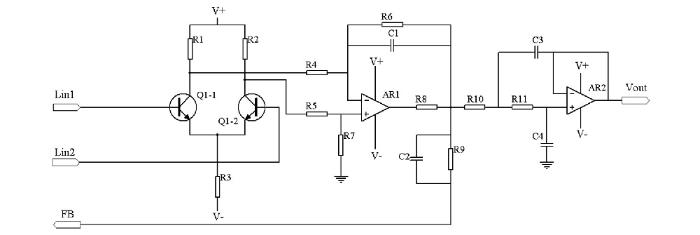
第一级的差模增益为:
式(2)中电阻R1与电阻R2取相同的阻值400 kΩ,β是三极管的直流放大倍数,rbe是三极管的基极电阻。β值为400,rbe值为2 MΩ,由式(1)计算得到其差模增益为80倍。
第二级同样采用差分放大电路,运放AR1选用高输入阻抗JFET运放AD711,当R4=R5,R6=R7,其频率响应特性为:
式(3)中取R4=1 KΩ;R6=100 KΩ;C1=47 pF时,经计算得到电路的-3 dB带宽为10 kHz,带宽内增益为100倍。
最后一级为二阶低通滤波电路,AR2选用低噪声运放OP27,当R10=R11=9 KΩ;C3=C4=1 000 pF时,电路增益为1,-3 dB带宽为10 kHz,其作用是限制传感器带宽,降低高频噪声。
上述设计是单个分量的磁场传感器,把3个参数同样的磁场传感器相互垂直安装到一块底板上,通过机械加工安装保证相互垂直度小于1°,构成三分量感应式磁场传感器(见图3所示),其体积为255 mm×255 mm×255 mm。
图3
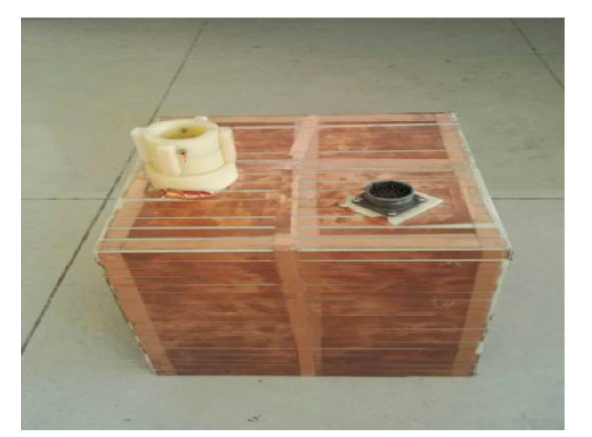
图3
三分量感应式磁场传感器外形图
Fig.3
Three-component inductive magnetic field sensor shape diagram
1.2 防水、耐压设计
三分量磁场传感器为适用于浅水区(20 m以内)工作,其防水、耐压性必须满足设计要求。本设计在三分量磁场传感器的外面加一个防水罩,如图4所示,采用玻璃钢材料,壁厚约8 mm,外观似钟形,流线型设计,在流动的水中阻力小,容易保持三分量磁场传感器的稳定性。该防水罩经机械工业仪器仪表综合技术经济研究所测量控制设备及系统实验室机械工业测量控制设备及网络质量检验中心测试,耐压达到0.2 MPa,防水性达到IPX8最高级,完全满足设计要求。
图4

2 三分量磁场传感器姿态测量
三分量磁场传感器由于要放到水下使用,其倾角和方位角必须知道,根据此角度把测得的磁场校准到标准方向(正南北、东西)或某一个方向。为此采用美国生产的定向器544 H,其主要指标为:方位角精度±1°;倾角精度±0.5°,满足设计要求。把它安装到三分量磁场传感器箱体上面(见图5所示),该传感器测得的数据是相互垂直的三个方向的磁场值(Hx、Hy、Hz)、三个方向的重力值(gx、gy、gz),由这些数据经过计算最终得到三分量磁场传感器在水下的姿态(倾角和方位角)。
图5

图5
安装了定向器的三分量磁场传感器
Fig.5
Three-component magnetic field sensor with directional device installed
2.1 三分量坐标系确定及倾角、方位角计算[10-13]
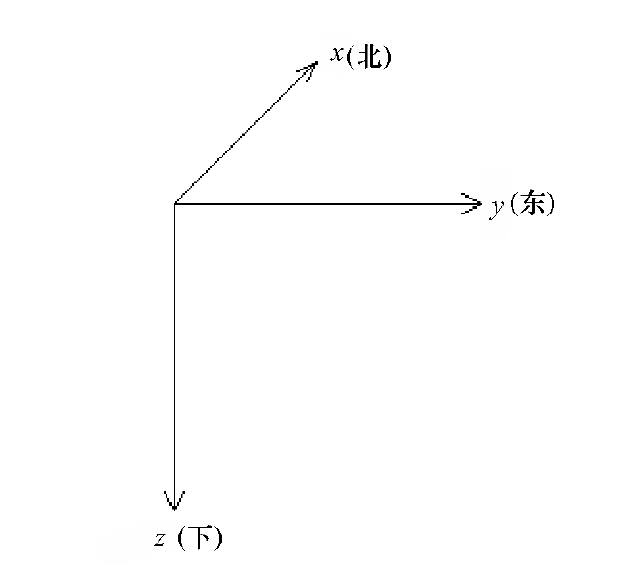
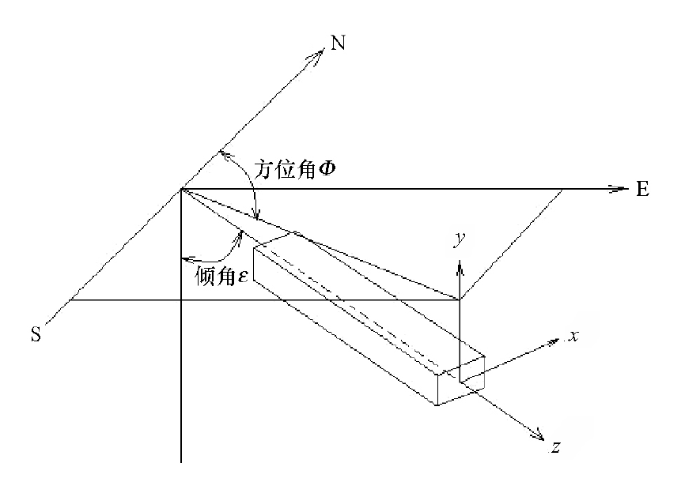
定义坐标系如图6所示,如此定义坐标系的理由是:x为北、y为东,这样可使其与大地坐标的北(x)、东(y)一致,亦即与地形图的坐标一致;z为下,与大地电磁教科书的多数示意图中的磁场方向一致;x、y、z三个分量的正方向适用于右手定则(右手笛卡尔坐标系)。
图6
由重力参数计算倾角ε:
由重力、磁性参数计算的方位角ϕ:
定向器各角度的定义见图7。
图7
2.2 三分量磁场数据校正计算[14]
三分量磁场传感器测得的分别是x、y、z法线方向上的磁场值,为将其观测结果校正至图6的坐标系上,校正计算公式如下:
上述式(14)、(15)、(16)、(17)中Hx0、Hy0、Hz0为实测的感应电动势数据,φx、φy、φz分别为磁场传感器的北、东、下轴至定向器相应轴的夹角(逆时针为正,顺时针为负);Hx、Hy、Hz为经三分量校正计算后的磁场结果数据。
3 三分量磁场传感器测试结果
三分量磁场传感器研制完成后,先后在实验室内和野外环境中开展了性能指标和有效性测试,测试结果如下。
3.1 室内测试
图8
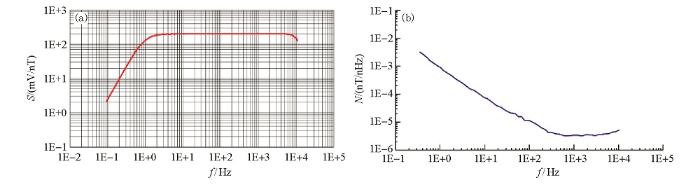
图8
三分量磁场传感器z分量灵敏度曲线(a)和噪声曲线(b)
Fig.8
Z component sensitivity curve(a) & noise curve(b) of the three-component magnetic field sensor
3.2 野外对比测试
本文研制的三分量磁场传感器分别在河北固安县和安新县开展了地面和水下的AMT对比试验,试验仪器有3根国外知名常规磁场传感器、2台国外知名大地电磁接收机。
首先,开展地面实验,在同一地点分别接本文的三分量磁场传感器和国外常规磁场传感器,布置方式按标准的AMT进行,本文三分量磁场传感器布置方向与国外知名常规磁场传感器布置方向相同,电道两台接收机共用一套,同时记录45 min,视电阻率对比曲线见图9。两种磁场传感器所获得的视电阻率曲线走势一致,说明本文研制的三分量磁场传感器是有效的。
图9
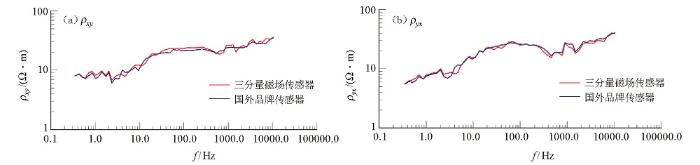
图9
地面测试视电阻率曲线对比
Fig.9
Comparison of apparent resistivity curves obtained from ground test
然后,国外知名常规磁场传感器正南北、东西布置,三分量磁传感器顺时针旋转30°布置,其他布置方式同上,在同一地点同时记录45 min,把三分量磁场传感器测得的数据按照上述的校正方法校正到正南北、东西方向,然后进行视电阻率计算,得到一组视电阻率曲线,与国外知名常规磁场传感器测的的视电阻率曲线对比(图10),两种磁场传感器所获得的视电阻率曲线走势一致,说明本文研制的三分量磁场传感器在旋转角度后取得的数据经校正后依然有效。同样我们也做其他不同角度的试验,限于篇幅在此不再一一列出。经过这些实验,证明了三分量磁场传感器无论姿态怎样,取得的数据经校正后有效,这就为三分量磁场传感器放入水下工作提供了依据。
图10
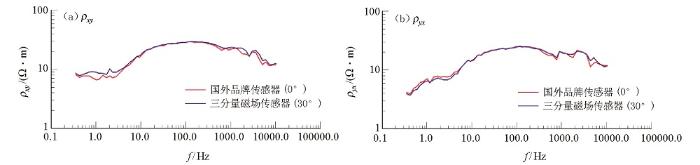
图10
旋转测试视电阻率曲线对比
Fig.10
Comparison of apparent resistivity curves obtained by rotation test
最后,在河北安新县白洋淀开展三分量磁场传感器的水下AMT试验,国外知名常规磁场传感器布置在白洋淀岸边陆地上,正南北、东西布置,三分量磁场传感器距离岸边10 m左右放入大约6 m深的水底,两台接收机共用电道,同时记录60 min,三分量磁场传感器先用定向器544H测量其姿态(倾角和方位角),然后把取得的磁场数据进行校正到正南北、东西方向,最后再计算视电阻率。从图11所示的视电阻率对比曲线可以看出,两种磁场传感器所获得的视电阻率曲线走势一致,在中频段吻合较好,在低频区误差较大,在2 kHz~7 kHz区间内视电阻率下降大,原因是在该区域内天然磁场信号处于“死频区”,信号弱,磁场传感器输出的信号噪声比差,故计算出的视电阻率也不准确。经过三分量磁场传感器的水下试验证明,本文研制的适用于浅水区的三分量磁场传感器是可靠的、有效的。
图11
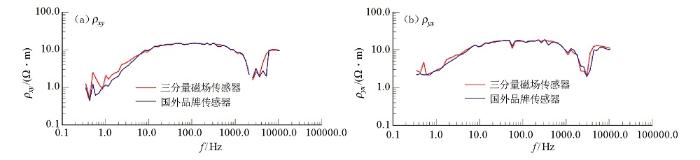
图11
水下AMT测试视电阻率曲线对比
Fig.11
Comparison of apparent resistivity curves obtained by underwater AMT test
4 结论
本文在现有工作基础上,采用磁通聚集磁芯结构、姿态测量技术,实现了一种小型化的适用于浅水区工作的三分量磁场传感器。其主体尺寸为:255 mm×255 mm×255 mm,质量为10 kg,工作频率范围为0.1 Hz~10 kHz,噪声指标在1 Hz处为0.8 pT/
参考文献
磁芯感应线圏传感器综述
[J].
回顾了地球物理领域应用广泛的磁芯感应线圈传感器.详细介绍了它的工作原理;给出了详细的设计公式和步骤;分析了三种形式的磁芯损耗,表明了材料是影响传感器性能的主要因素之一,比较了铁氧体、坡莫合金和无定形材料三种材料的不同特点;分析了传感器频率特性及频率补偿电路对频率特性的改善;介绍了两种不同的输出信号处理方法;指出了磁芯线圈传感器的设计难点在于磁芯的制造工艺和绕线方法;标定是传感器研制的一个关键步骤,标定对环境要求极高,需要在磁屏蔽室内进行,介绍了中国地震局地球物理研究所的大型磁屏蔽室结构;地磁场的补偿是标定系统的一个难点,一般采用一个单独的参考磁力仪对地磁场进行补偿.
A review on ferromagnetic induction coil sensors
[J].
基于纳米晶合金的宽频差分式磁场传感器的研究
[J].
Research on broadband frequency difference magnetic field sensor based on nanocrystalline alloy
[J].
音频大地电磁磁场传感器的研制
[J].
Development of magnetic sensor in audio-frquency magnetotelluric sounding
[J].
低频感应式磁传感器优化设计
[J].
Optimization of induction magnetic sensos at lower frequency
[J].
频率域感应式磁传感器信号调理电路研究
[J].
Research for Signal adjustment electric circuit of Inductive Magnetism Transducer in the frequency domain
[J].
Design of magnetic concentrators for high sensitivity anisotropic magnetoresistor devices
[J].
高灵敏度感应式磁场传感器的研究
[J].
Research of high sensitivity inductive magnetic sensor
[J].
基于磁反馈的宽频带磁传感器的研制
[J].
Development of broad frequency band magnetic field sensor based on flux feedback
[J].
低噪声运放前置放大器的实用设计
[J].
Low noise operational amplifier and practical design of the preamplifier
[J].
TEM井中磁探头的校准装置及校准方法
[P].
Calibration device and calibration method of magnetic probe in TEM well
[P].
地-井瞬变电磁(TEM)三分量校正软件1.0
[CP].
Ground-well transient electromagnetic (TEM) Three-component correction Software 1.0
[CP].
Inversion of array induction logs and its application
[J].
Three componet DHEM surveying at balcooma
[J].
Inversion of surface and downhole electromagnetic data for a 3D earth
[C]//

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}