0 引言
航空重力测量系统技术研究最早开始于20世纪60年代,自20世纪90年代以来,随着DGPS技术的成熟和应用,航空重力测量系统技术得到快速发展[1 ,2 ,3 ] 。到目前为止,俄罗斯、加拿大、美国和德国等先进国家已经有多款成熟产品在市场上销售和商业应用。根据采用稳定平台的不同,可以将航空重力测量系统分为双轴稳定平台式、三轴稳定平台式和捷联数学平台3种类型。基于双轴稳定平台航空重力仪的代表产品主要有美国Micro-g公司的TAGS-6(其配套软件以Matlab为基础,采用FIR低通滤波进行数据处理)、DGS公司的DGS、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,目前均已得到商业化应用,测量精度在1×10-5 m/s2 左右;基于三轴稳定平台航空重力仪的代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪(其数据处理软件采用FIR低通滤波进行数据处理)和俄罗斯GT重力技术公司的GT系列航空重力仪(其配套软件以Oasis商业软件为平台,借助平台软件功能模块,采用Kalman双向滤波进行数据处理),后者的测量精度可达0.6×10-5 m/s2 。基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等。三轴稳定平台与双轴稳定平台的区别在于三轴能使平台台体相对惯性空间保持方位稳定,既稳定平台在重力测量过程中始终保持与当地地理坐标系统一致,水平加速度改正过程不需要进行估算和坐标旋转进行投影。
目前在国内中国自然资源航空物探遥感中心、中国人民解放军国防科技大学、北京航天控制仪器研究所等均开展了捷联航空重力仪的研制,研制出工程样机测量精度达到1×10-5 m/s2 。北京自动化控制设备研究所采用与AIRGrav重力仪基本一致的“三轴稳定平台+石英挠性加速度计重力传感器”方案,经静态和船载海洋动态测量试验表明,其测量精度可达1×10-5 m/s2 [4 ] 。此外,中国科学院测量与地球物理研究所、总参测绘研究所、船舶重工集团707所也相继开展了海/空重力仪的研制工作。
总体上,我国新研制的航空重力测量系统已接近国际先进水平,但在测量精度和实用化方面与国外仍有一定差距,尤其是在数据处理技术成熟度及软件实用化水平方面有待提升。
1 平台式航空重力测量数据处理方法
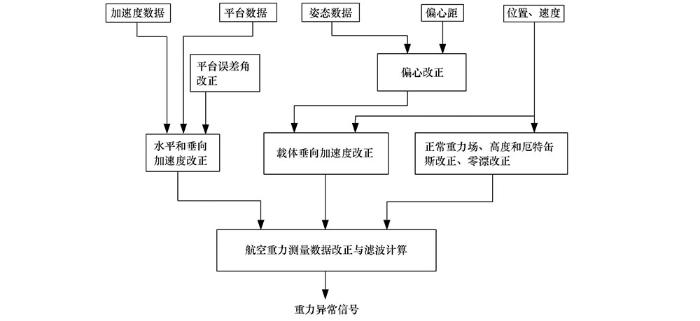
平台式航空重力系统测量所涉及的数据包含有重力仪加速度计测量数据、稳定平台测量数据(载体姿态数据)和GNSS测量数据等,在获得航空重力异常过程中需要对这些数据进行解算、同步及改正处理。其处理流程如图1 。
图1
图1
三轴稳定平台式航空重力测量数据改正与滤波计算处理流程
Fig.1
Flow chart of calculation and processing of correction and filtering of airborne gravity measurement data of three-axis stabilized platform
(1) G z = f z 1 - f z 0 + G b ,
其中:Gb 为航空重力测量系统测量前所处位置的重力基准值, f z 1 f z 0
(2) G z = f z + G b 。
通过GNSS测量获得载体运动产生的加速度,进一步可获得空间重力值Gf 为:
(3) G f = f z + G b - H - G n - G e - G d + Δ G g + Δ H + Δ F p ,
其中:H 是WGS84坐标系下GNSS测得的飞机载体的高度,Gn 是正常场重力值,Ge 是由GNSS的位置和速度计算的厄特缶斯(Eotvos)改正值,Gd 是由参考测量计算的重力仪零漂量,ΔFp 是载体飞行状态对航空重力数据引起的误差,ΔGg 是重力仪的随机噪声,ΔH 是GNSS测量的随机噪声。
根据平台式航空重力测量系统特点,在测量过程中其平台处于非理想水平状态(主要是由稳定平台的安装误差与飞行状态下稳定平台的测量误差引起),其垂向传感器的观测值(fz )并不完全是垂向分量,因而需要利用稳定平台的安装误差角度和平台测量倾斜角来进行改正,同时对水平加速度观测值(fx 、fy )也进行改正。其数学模型为:
(4) G f = f z ' + G b - H · · ' - G n - G e - G d + f x ' + f y ' + Δ G g + Δ H + Δ F p ,
其中: f z ' f x ' x 轴方向水平加速度改正后的垂向分量; f y ' y 轴方向水平加速度改正后的垂向分量。
1.1 平台式航空重力测量数据各项改正
平台式航空重力测量数据改正主要包括:正常场改正、空间(高度)改正、厄特缶斯改正、偏心改正、零漂改正、水平加速度改正和垂向加速度改正。
自由空间的正常重力场Gn 由参考椭球面上的正常重力场G 0 和高度改正Gh 两部分组成:
(5) G n = G 0 - G h 。
参考椭球面的正常重力场采用CGS2000正常重力公式[5 ] :
(6) G 0 = 9.7803253361 × 1 + 0.001931852619 si n 2 L 1 - 0.00669433800229 si n 2 L ,
(7) G h = 0.3086 ( 1 + 0.0007 cos 2 L ) ( h - Δ h - h b ) - 0.72 × 10 - 7 ( h - Δ h - h b ) ( 10 - 5 m / s 2 ) ,
其中:L 为测点大地纬度,h 为测点大地高;Δh 为大地高的偏心修正;hb 为基准点大地水准面高。
载体在每航次重力测量开始前和结束后都要在基准点进行一定时间的静态测量,分别称为前校测量和后校测量。由于重力仪元器件的温度变化等原因会引起同一观测点测量值出现漂移,对漂移所做的改正即为零点漂移改正。当前校、后校时间间隔不长时,可以将零点漂移看作是线性变化,即零点漂移改正Gd 为:
(8) G d = - f z 1 - f z 0 t 1 - t 0 ( t - t 0 ) ,
(9) G d = - [ ( f z 1 - f z 0 ) - ( g b 1 - g b 0 ) ] - t - t 0 t 1 - t 0 。
如果前校与后校基准点为同一点位置,改正用式(8),前校与后校基准点为不同点,则改正用式(9)。其中, f z 0 f z 1 g b 0 g b 1 t 0 、t 1 分别是前校、后校加速度计垂向分量观测值对应的时间;t 是航行测量时加速度计垂向分量观测值对应的时间。
在航空重力测量时,重力仪不仅受到地球自转产生的离心力的影响,还受到载体速度产生的附加离心力的影响,这种影响就是厄特缶斯效应。厄特缶斯改正的数学模型是由匈牙利学者Eotvos首先推导并于1919年用实验方法证实,其严密计算公式为[5 ,6 ] :
(10) G e = 2 ω cos L · V E + V E 2 ( M + h ) + V N 2 ( N + h ) ,
其中:下标E、N分别表示当地水平坐标系的东、北方向,ω 为地球的自转角速度,L 为地心纬度,h 为测点大地高,M 、N 为椭球子午与卯酉曲率半径。
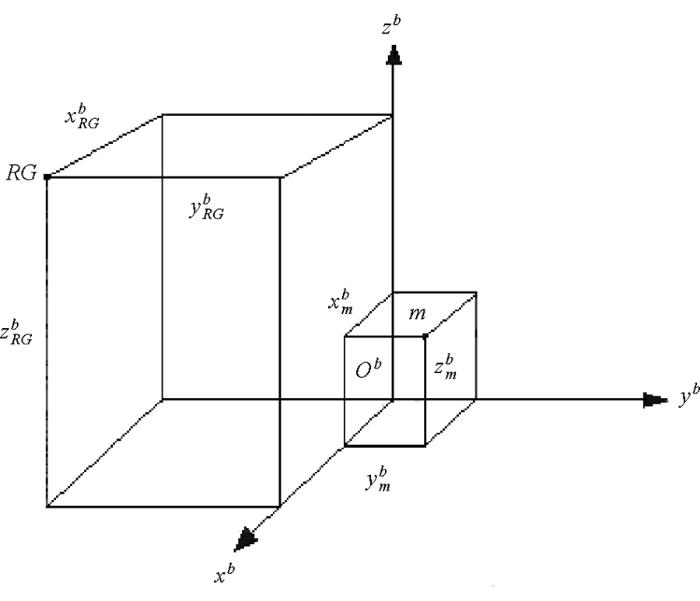
航空重力测量中GNSS天线安装位置位于飞机的上部,而重力仪安装在机舱内部,因此重力传感器中心与GNSS天线相位中心不一致。载体飞行产生俯仰和横滚运动时,重力传感器中心与GNSS天线相位中心的速度和加速度也存在差异。为了计算重力传感器中心处的各种扰动加速度,需在GNSS确定的相应量中进行偏心改正。偏心改正除位置因素外,主要源于飞机姿态变化,故也称之为姿态改正[4 ] 。
如图2 所示,建立载体直角坐标系(b 系,Sb =[Ob ;xb ,yb ,zb ];原点Ob 在载体中心,xb 指向载体前进路线的右方向,yb 指向载体前进方向,zb 与xb 、yb 构成右手系)。设GNSS天线相位中心RG 在Sb 中的坐标为 x RG b y RG b z RG b M 在Sb 中的坐标为 x m b y m b z m b
图2
图2
载体坐标系中的重力传感器和GNSS天线位置坐标
Fig.2
Gravity sensor and GNSS antenna position coordinate diagram in the carrier coordinate system
(11) Δ r b = r m b - r RG b = d x b d y b d z b = x m b - x RG b y m b - y RG b z m b - z RG b ,
其中: r m b r RG b Sb 中的位置矢量;dxb 、dyb 、dzb 为Δrb 的3个分量。
利用方向余弦矩阵 C b n n 下的位置矢量之差:
(12) Δ r n = C b n Δ r b
当地地理坐标系n 可通过绕载体坐标系Z 轴转动方位角A 、绕y 轴转动俯仰角θ 和绕x 轴转动滚动角ϕ 来实现其到载体坐标系的转换,坐标转换矩阵为:
(13) C b n = R 11 R 12 R 13 R 21 R 22 R 23 R 31 R 32 R 33 = cos θ cos A - cos ϕ sin A + sin ϕ sin θ cos A sin ϕ sin A + cos ϕ sin θ cos A cos θ sin A cos ϕ cos A + sin ϕ sin θ sin A - sin ϕ cos A + cos ϕ sin θ sin A - sin θ sin ϕ cos θ cos ϕ cos θ 。
为了提高航空重力测量的精度,通过偏心改正来对垂向加速度进行改正。利用式(12)和(13)求得位置的偏心改正后,直接利用数字差分方法计算出相应的速度和加速度的偏心改正:
(14) Δ r · n ( t ) = Δ r n ( t + 1 ) - Δ r n ( t - 1 ) 2 T ,
(15) Δ r · · n ( t ) = Δ r · n ( t + 1 ) - Δ r · n ( t - 1 ) 2 T ,
载体飞行时,稳定平台并不能保证完全水平,同时载体运动过程中会产生水平方向上的干扰加速度。为消除重力仪平台偏离水平引起的误差,称为水平加速度改正。
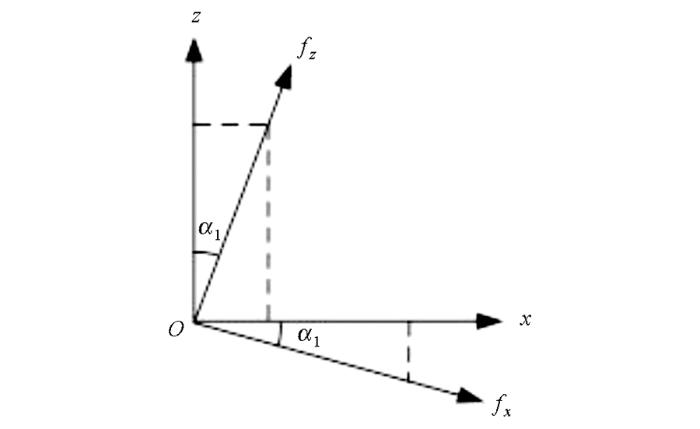
如图3 所示,当飞行测量时稳定平台偏离水平X 轴的倾角误差为α 1 ,水平正轴方向下倾角为正,假设重力仪垂向传感器相对于稳定平台X 轴安装偏角为βz ,则X 轴方向的水平加速度投影在垂向方向的改正为:
(16) f x ' = f x sin ( α 1 + β z ) ,
其中:fx 为x 轴水平加速度。当平台误差角为角秒级时,一个方向倾角引起的水平加速度改正为:
(17) f x ' = f x sin ( α 1 + β z ) ≈ f x ( α 1 + β z )
图3
图3
水平加速度x 轴方向改正角度
Fig.3
Horizontal acceleration correction diagram
考虑相互垂直的两个水平方向的平台倾角(假设从平台水平轴正方向看过去,逆时针旋转角度为正,顺时针旋转角度为负),则水平加速度修正可表示为:
(18) f x ' + f y ' ≈ - f y ( α 2 + β z ) + f x ( α 1 + λ z ) ,
其中:稳定平台偏离水平y 轴的倾角误差为α 2 ,λz 为垂向传感器相对于稳定平台y 轴安装偏角。
对于差分GNSS获得的载体加速度,经过载体姿态变化引起的垂向加速度改正后如下式:
(19) H · · ' = H · · + Δ r · · n ( t ) ,
对于重力传感器获得的比力在垂向分量方向改正为下式:
(20) f z ' = f z × cos ( β z + α 1 ) × cos ( λ z + α 2 ) 。
1.2 航空重力测量数据的滤波方法
航空重力测量数据经过各项改正后还包含有载体的高频振动将对测量数据产生噪声影响。为了在强噪声背景下提取微弱的重力异常信号,需要采用一些滤波方法,通常采用有限冲激响应FIR(finite impulse response)低通滤波[7 ,8 ,9 ] 和Kalman平滑滤波。
窗函数FIR低通滤波器是采用长度为M 的窗函数w (n )对无限长的理想单位脉冲响应hd (n )进行截断,从而得到逼近理想滤波器频率响应的线性相位FIR滤波器,其单位脉冲响应为
(21) h ( n ) = h d ( n ) w ( n ) = h d ( n ) w ( n ) 0 ≤ n ≤ M - 1 0 其他
其中:窗函数w (n )必须中心偶对称,即w (n )=w (M -1-n )。常用的窗函数有矩形窗、三角窗、汉宁窗、汉明窗、布莱克曼窗等,表1 是几种窗函数的性能比较。
利用窗函数主瓣宽度的一半等于滤波器的归一化截止频率(采样率为Fs )的方法来估算窗函数长度,滤波器的长度与其截止频率fc 之间有如下关系:
(22) M = 2 F s f c 。
笔者所采用的Kalman平滑算法是将高度、垂向加速度、重力异常、重力异常一阶导数作为被估计状态,根据飞行时传感器的受力状态构建数学模型,并用最小方差准则进行最优估计,进而去除重力仪和GNSS测量的随机噪声[10 ,11 ,12 ] 。
(23) δ g = f z ' + G b - H · · ' - G n - G e - G d + f x ' + f y ' ,
(24) H · ' = W
此外,重力异常噪声可以用随机统计模型来描述,本文采用如下的二阶近似模型:
(25) δ g · · = μ q g ,
(26) δ g · = U ,
联立式(23)~(26),并作相应变换后即可得到状态方程:
H · ' = W W · = f z ' + G b - H · · ' - G n - G e - G d + f x ' + f y ' - δ g δ g · = U U · = μ q g
即被估计状态为x =[H' ,W ,δg ,U ]T ,根据卡尔曼平滑算法,进行计算得到解算后的空间重力异常值。
2 航空重力数据处理与分析
2017年11月在某海域进行了新研制的三轴稳定平台航空重力仪的首次测试飞行,完成了EW方向的3个架次和SN方向的一个架次重复线飞行。通过研制的平台式航空重力数据处理软件对测量的数据进行了处理与分析。航空重力测量数据经过各项改正及FIR低通滤波后获得空间重力异常,经水平调整后进行内符合精度统计[13 ,14 ] ,并和GT航空重力测量系统同位置测量获得的空间重力异常进行了对比。
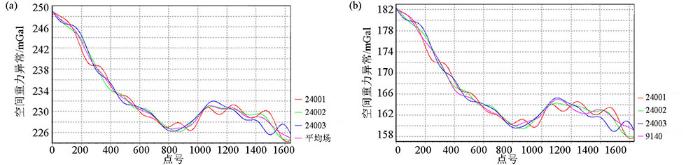
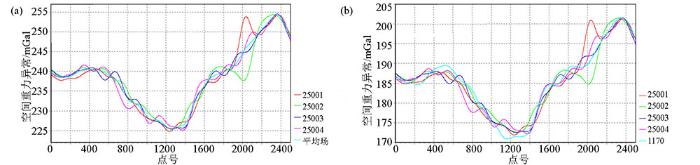
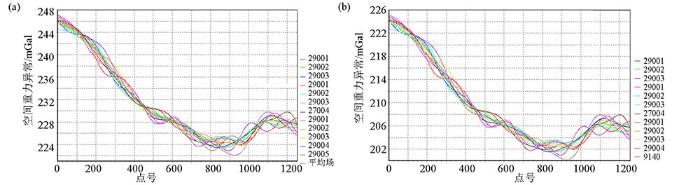
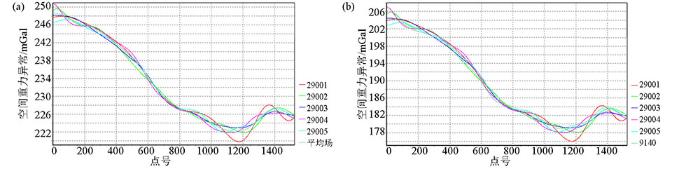
第1个架次为EW向的重复线飞行,获得3条有效测线,100 s低通滤波(采用汉宁窗)后其内符合精度为0.679×10-5 m/s2 (如图4 a),与GT同位置的测线9140外符合精度为0.641×10-5 m/s2 (如图4 b)。
图4
图4
第1个架次100 s低通滤波后内符合(a)和外符合精度(b)
Fig.4
The internal (a) and external (b) accord accuracy of the first flight repeat lines after 100 s low-pass filtering
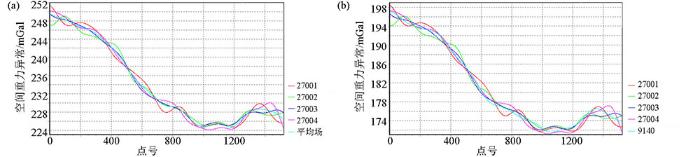
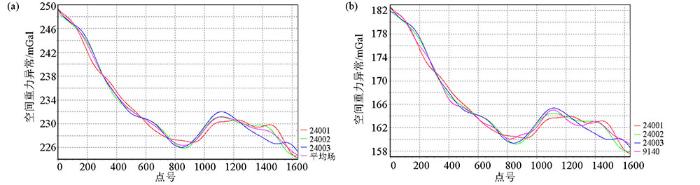
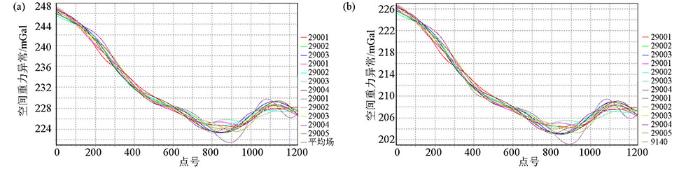
第2个架次为SN向的重复线飞行,获得4条有效测线,100 s低通滤波(采用汉宁窗)后其内符合精度为1.420×10-5 m/s2 (如图5 a),以GT同位置的测线1170外符合精度为1.389×10-5 m/s2 (如图5 b)。
图5
图5
第2个架次100 s低通滤波后内符合(a)和外符合精度(b)
Fig.5
The internal (a) and external (b) accord accuracy of the second flight repeat lines after 100 s low-pass filtering
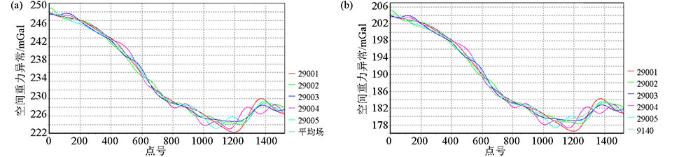
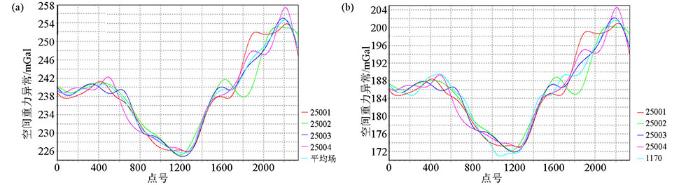
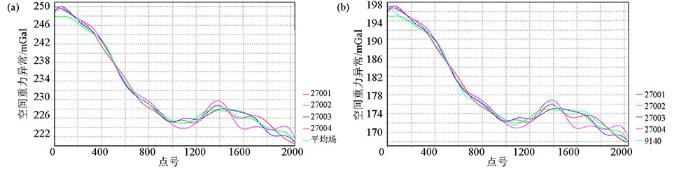
第3个架次为EW向的重复线飞行,获得4条有效测线,100 s低通滤波(采用汉宁窗)后内符合精度为0.676×10-5 m/s2 (如图6 a),以GT同位置的测线9140外符合精度为0.638×10-5 m/s2 (如图6 b)。第4个架次为EW向的重复线飞行,获得5条有效测线,100 s低通滤波(采用汉宁窗)后其内符合精度为0.650×10-5 m/s2 (图7 a),以GT同位置的测线9140外符合精度为0.637×10-5 m/s2 (图7 b)。
图6
图6
第3个架次100 s低通滤波后内符合(a)和外符合精度(b)
Fig.6
The internal (a) and external (b) accord accuracy of the third flight repeat lines after 100 s low-pass filtering
图7
图7
第4个架次100 s低通滤波后内符合精度(a)和外符合精度(b)
Fig.7
The internal (a) and external (b) accord accuracy of the fourth flight repeat lines after 100 s low-pass filtering
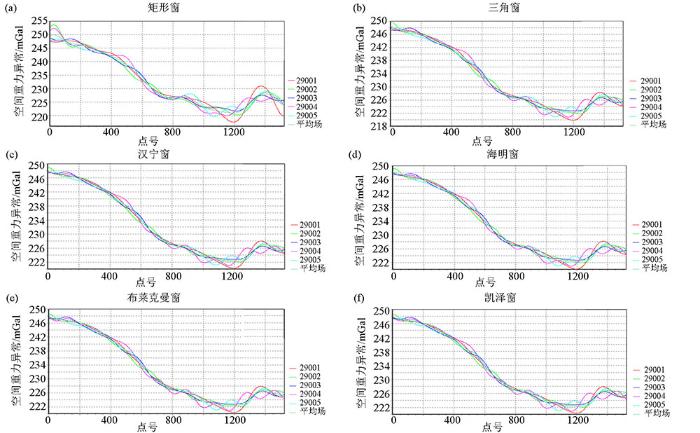
针对不同FIR窗函数低通滤波器,设置同样的滤波参数(低通截止频率100 s),对第4个架次数据进了低通滤波处理分析,汉宁窗、海明窗、布莱克曼窗和凯塞窗处理结果相当,其内符合精度都在0.66×10-5 m/s2 左右。三角窗和矩形窗处理结果偏大(图8 )。
图8
图8
第4个架次不同窗函数FIR低通滤波后内符合精度
Fig.8
The internal accord accuracy of the fourth flight repeat lines after FIR low-pass filtering with different windows function
第1架次、第3架次和第4架次所有EW向的重复线内符合精度为0.693 ×10-5 m/s2 (图9 a),以GT同位置的测线9140外符合精度为0.679×10-5 m/s2 (图9 b)。
图9
图9
所有东西向重复线100 s低通滤波后内符合精度(a)和外符合精度(b)
Fig.9
The internal (a) and external (b) accord accuracy of all repeat lines along east-west direction after 100 s low-pass filtering
同样对4个架次的数据经过各项改正及Kalman滤波后获得空间重力异常,经水平调整后进行内符合精度统计,并和GT航空重力测量系统同位置测量获得的空间重力异常进行了对比。第1个架次Kalman平滑滤波后内符合精度为0.550×10-5 m/s2 (图10 a),外符合精度为0.532×10-5 m/s2 (图10 b);第2个架次Kalman平滑滤波后内符合精度为1.372×10-5 m/s2 (图11 a),外符合精度为1.354×10-5 m/s2 (图11 b);第3个架次Kalman平滑滤波后内符合精度为0.663×10-5 m/s2 (图12 a),外符合精度为0.650×10-5 m/s2 (图12 b);第4个架次Kalman平滑滤波后内符合精度为0.611×10-5 m/s2 (图13 a),外符合精度为0.605×10-5 m/s2 (图13 b)。
图10
图10
第1个架次Kalman滤波后内符合精度(a)和外符合精度(b)
Fig.10
The internal (a) and external (b) accord accuracy of the first flight repeat lines after Kalman filtering
图11
图11
第2个架次Kalman滤波后内符合精度(a)和外符合精度(b)
Fig.11
The internal (a) and external (b) accord accuracy of the second flight repeat lines after Kalman filtering
图12
图12
第3个架次Kalman滤波后内符合精度(a)和外符合精度(b)
Fig.12
The internal (a) and external (b) accord accuracy of the thrid flight repeat lines after Kalman filtering
图13
图13
第4个架次Kalman滤波后内符合精度(a)和外符合精度(b)
Fig.13
The internal (a) and external (b) accord accuracy of the fourth flight repeat lines after Kalman filtering
第1架次、第3架次和第4架次所有EW向的重复线内符合精度为0.590 ×10-5 m/s2 (图14 a),以GT同位置的测线9140外符合精度为0.581×10-5 m/s2 (图14 b)。
图14
图14
所有东西向重复线Kalman滤波后内符合精度(a)和外符合精度(b)
Fig.14
The internal (a) and external (b) accord accuracy of all repeat lines along east-west direction after Kalman filtering
3 结论与建议
针对新研制的三轴稳定平台式航空重力测量系统首次获得的重力数据,进行了数据处理的方法研究及软件研制,并对处理后的数据进行了分析对比。对测量数据进行各项改正和FIR低通滤波(100 s)后,其内符合精度达到0.693×10-5 m/s2 ,通过Kalman平滑滤波内符合精度达到0.590×10-5 m/s2 。通过数据处理后的结果分析对比,研制的稳定平台式航空重力数据处理软件达到了预期效果, 实现了国产航空重力测量系统配套软件从无到有的突破。
低频噪声与有用信号强度相当时,低通滤波器效果较差且其对过渡带内的噪声不能有效滤除。Kalman平滑作为一种最优估计方法,可对全频带内的误差进行修正。结合FIR和Kalman滤波的特点,采用级联滤波的方法提高测量数据的分辨率,有待进一步研究。
致谢:
本次软件研制及数据分析对比得到了北京自动化控制设备研究所和东南大学的相关老师及技术人员大力支持,在此表示诚挚的谢意。
参考文献
View Option
[1]
熊盛青 . 我国航空重磁勘探技术现状与发展趋势
[J]. 地球物理学进展 , 2009 ,24 (1 ):113 -117 .
DOI:
Magsci
[本文引用: 1]
<FONT face=Verdana>本文概要介绍了我国航空磁力测量方法技术现状,近年来测量技术与解释方法方面的最新进展.首次介绍了我国引进国外航空重力测量系统以来的最新测量技术成果.分析了我国航空物探技术与国际上先进国家的差距,并对我国航空物探的发展趋势进行了分析与预测.</FONT>
Xiong S Q . The present situation and development of airborne gravity and magnetic survey techniques in China
[J]. Progress in Geophysics , 2009 ,24 (1 ):493 -498 .
Magsci
[本文引用: 1]
[2]
孙中苗 , 夏哲仁 , 石磐 . 航空重力测量研究进展
[J]. 地球物理学进展 , 2004 ,19 (3 ):492 -496 .
DOI:
Magsci
[本文引用: 1]
近十几年来,航空重力测量技术的研究和应用日趋活跃,业已成为地球重力场研究中最为热门的领域之一.航空重力测量可分为航空标量重力测量、航空矢量重力测量和航空梯度重力测量.本文概述了航空标量重力测量的研究现状及发展动态,传统航空重力测量系统的改进,新型系统方案的研究,从GPS中导出加速度的理论和方法,滤波和估算方法及航空重力数据的应用等五个方面的重要研究成果.文中最后介绍了我国自行研制的航空重力测量系统的概况.
Sun Z M Xia Z R Shi P . Advances in aerogravimetry
[J]. Progress in geophysics , 2004 ,19 (3 ):492 -496 .
Magsci
[本文引用: 1]
[3]
孙中苗 . 航空重力测量理论、方法及应用研究
[D]. 郑州: 中国人民解放军信息工程大学 , 2004 .
[本文引用: 1]
Sun Z M . Theory, method and application of aerogravimetry
[D]. Zhengzhou: Information Engineering University of the Chinese People’s Liberation Army , 2004 .
[本文引用: 1]
[4]
胡平华 , 赵明 , 黄鹤 , 等 . 航空/海洋重力测量仪器发展综述
[J]. 导航定位与授时 , 2017 ,7 (7 ):10 -18 .
[本文引用: 2]
Hu P H Zhao M Huang H , et al . Overview of the development of aeronautical/oceanic gravimetric instruments
[J]. Navigation, positioning and timing , 2017 ,7 (7 ):10 -18 .
[本文引用: 2]
[5]
熊盛青 , 周锡华 , 郭志宏 , 等 . 航空重力勘探理论方法与应用 [M]. 北京 : 地质出版社 , 2010 , 368 -380 .
[本文引用: 3]
Xiong S Q Zhou X H Guo Z H , et al. Theory, method and application of aerial gravity exploration [M]. Beijing : Geological Publishing House , 2010 , 368 -380 .
[本文引用: 3]
[6]
孙中苗 . 航空重力测量中厄特弗斯改正的计算与误差分析
[J]. 解放军测绘学院学报 , 1999 ,16 (1 ):5 -9 .
[本文引用: 1]
Sun Z M . Calculation and Error Analysis of Eotvos Correction in Aerial Gravity Survey
[J]. Journal of PLA College of Surveying and Mapping , 1999 ,16 (1 ):5 -9 .
[本文引用: 1]
[7]
郭志宏 , 罗锋 , 安占峰 . 航空重力数据窗函数法FIR低通数字滤波实验
[J]. 物探与化探 , 2007 ,31 (6 ):568 -571 .
Magsci
[本文引用: 1]
<p>采用窗函数法FIR低通数字滤波方法,对GT-1A型航空重力系统的测量数据进行了滤波试验研究,获得了一些有意义的结果.试验结果表明,通过选择合适窗形、窗口长度和滤波参数,窗函数法FIR低通数字滤波器是可以在航空重力数据的低通数字滤波处理中发挥应有的作用,获得满意的效果.</p>
Guo Z H Luo F An Z F . FIR low-pass digital filtering experiment with airborne gravity data window function method
[J]. Geophysical and geochemical exploration , 2007 ,31 (6 ):568 -571 .
Magsci
[本文引用: 1]
[8]
罗锋 , 郭志宏 , 骆遥 , 等 . 航空重力数据的等波纹FIR 低通滤波试验
[J]. 物探与化探 , 2012 ,36 (5 ):856 -860 .
Magsci
[本文引用: 1]
为解决航空重力测量中的核心技术之一——强噪声背景下提取微弱重力异常信号的问题,根据等波纹切比雪夫逼近理论,采用瑞米兹(Remez)交换算法设计等波纹线性相位FIR低通滤波器,利用模型数据对该方法进行了验证,并通过GT-1A型航空重力系统测量数据进行滤波试验。结果表明,基于Remez交换算法设计等波纹线性相位FIR低通滤波器,在自由空气重力异常获取的滤波试验中,能获得与GT-1A系统卡尔曼平滑滤波相同的效果。
Luo F Guo Z H Luo Y , et al . Equal-ripple FIR low-pass filtering test for airborne gravity data
[J]. Geophysical and geochemical exploration , 2012 ,36 (5 ):856 -860 .
Magsci
[本文引用: 1]
[9]
蔡劭琨 , 吴美平 , 张开东 . 航空重力测量中FIR低通滤波器的比较
[J]. 物探与化探 , 2010 ,34 (1 ):74 -78 .
Magsci
[本文引用: 1]
<p>航空重力测量数据中含有大量的噪声,需要采用FIR低通滤波器来提取实际的重力异常信息。结合一组实测的航空重力测量数据,讨论FIR低</p><p>通数字滤波器截止频率和滤波器长度的确定方法,研究了无效数据的删除方法;通过比较不同窗函数设计的滤波器的数据处理性能,得出了在航空</p><p>重力测量数据处理中,汉宁窗和海明窗设计FIR低通数字滤波器可以满足重力场信息提取的要求。</p>
Cai S K Wu M P Zhang K D . Comparison of FIR low-pass filters in aerogravimetry
[J]. Geophysical and geochemical exploration , 2010 ,34 (1 ):74 -78 .
Magsci
[本文引用: 1]
[10]
王冠鑫 . 航空重力数据去噪方法研究与GeoProbe平台插件实现
[D] . 北京:中国地质大学(北京) , 2018 .
[本文引用: 1]
Wang G X . The research on airborne gravity data denoising method and GeoProbe platform plug-in implementation
[D]. Beijing: China University of Geosciences (Beijing) , 2018 .
[本文引用: 1]
[11]
王静波 , 熊盛青 , 郭志宏 , 等 . 航空重力数据Kalman滤波平滑技术应用研究
[J]. 地球物理学进展 , 2012 ,27 (4 ):1717 -1722 .
[本文引用: 1]
Wang J B Xiong S Q Guo Z H , et al . Application of Kalman filtering smoothing technique for aeronautical gravity data
[J]. Progress in geophysics , 2012 ,27 (4 ):1717 -1722 .
[本文引用: 1]
[12]
蔡体菁 , 周薇 , 鞠玲玲 . 平台式重力仪测量数据的卡尔曼滤波处理
[J]. 中国惯性技术学报 , 2015 ,23 (6 ):718 -720 .
[本文引用: 1]
Cai T J Zhou W Ju L Ll . Kalman filter processing of platform gravimeter measurement data
[J]. Chinese Journal of Inertial Technology , 2015 ,23 (6 ):718 -720 .
[本文引用: 1]
[13]
郭志宏 , 熊盛青 , 周坚鑫 , 等 . 航空重力重复线测试数据质量评价方法研究
[J]. 地球物理学报 , 2008 ,51 (5 ):1538 -1543 .
DOI:
Magsci
[本文引用: 1]
<FONT face=Verdana>为了量化评估航空重力系统的性能指标,通常采用多次往返的重复线测量方式来测试航空重力仪动态测量的重复性和一致性,但现有规范中没有明确针对航空重力重复线测试数据质量的评估准则,本文研究总结了航空重力重复线测试数据均方差精度计算方法,依据重复线测试数据均方差内、外符合精度的计算结果,可以更为客观地评估仪器的动态测量精度指标和工作状态.</FONT>
Guo Z H Xiong S Q Zhou J X , et al . Study on the evaluation method of data quality for airborne gravity repeat line test
[J]. Journal of Geophysics , 2008 ,51 (5 ):1538 -1543 .
Magsci
[本文引用: 1]
[14]
姜作喜 , 张虹 , 郭志宏 . 航空重力测量内符合精度计算方法
[J]. 物探与化探 , 2010 ,34 (5 ):672 -676 .
Magsci
[本文引用: 1]
<p>为了评估航空重力系统的性能指标,通常采用对一条测试线多次往返飞行计算各条重复测试</p><p>线内符合精度的方法。笔者研究了一种较准确的计算各重复线对应点的方法,并在对应点处采用插</p><p>值方法计算其重力值,利用重复线上对应点的重力值进行均方差计算可以得到精度较高的内符合精</p><p>度值。</p>
Jiang Z X Zhang H Guo Z H . Calculating method of internal coincidence accuracy in airborne gravimetry
[J]. Geophysical and geochemical exploration , 2010 ,34 (5 ):672 -676 .
Magsci
[本文引用: 1]
我国航空重磁勘探技术现状与发展趋势
1
2009
... 航空重力测量系统技术研究最早开始于20世纪60年代,自20世纪90年代以来,随着DGPS技术的成熟和应用,航空重力测量系统技术得到快速发展[1 ,2 ,3 ] .到目前为止,俄罗斯、加拿大、美国和德国等先进国家已经有多款成熟产品在市场上销售和商业应用.根据采用稳定平台的不同,可以将航空重力测量系统分为双轴稳定平台式、三轴稳定平台式和捷联数学平台3种类型.基于双轴稳定平台航空重力仪的代表产品主要有美国Micro-g公司的TAGS-6(其配套软件以Matlab为基础,采用FIR低通滤波进行数据处理)、DGS公司的DGS、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,目前均已得到商业化应用,测量精度在1×10-5 m/s2 左右;基于三轴稳定平台航空重力仪的代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪(其数据处理软件采用FIR低通滤波进行数据处理)和俄罗斯GT重力技术公司的GT系列航空重力仪(其配套软件以Oasis商业软件为平台,借助平台软件功能模块,采用Kalman双向滤波进行数据处理),后者的测量精度可达0.6×10-5 m/s2 .基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等.三轴稳定平台与双轴稳定平台的区别在于三轴能使平台台体相对惯性空间保持方位稳定,既稳定平台在重力测量过程中始终保持与当地地理坐标系统一致,水平加速度改正过程不需要进行估算和坐标旋转进行投影. ...
我国航空重磁勘探技术现状与发展趋势
1
2009
... 航空重力测量系统技术研究最早开始于20世纪60年代,自20世纪90年代以来,随着DGPS技术的成熟和应用,航空重力测量系统技术得到快速发展[1 ,2 ,3 ] .到目前为止,俄罗斯、加拿大、美国和德国等先进国家已经有多款成熟产品在市场上销售和商业应用.根据采用稳定平台的不同,可以将航空重力测量系统分为双轴稳定平台式、三轴稳定平台式和捷联数学平台3种类型.基于双轴稳定平台航空重力仪的代表产品主要有美国Micro-g公司的TAGS-6(其配套软件以Matlab为基础,采用FIR低通滤波进行数据处理)、DGS公司的DGS、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,目前均已得到商业化应用,测量精度在1×10-5 m/s2 左右;基于三轴稳定平台航空重力仪的代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪(其数据处理软件采用FIR低通滤波进行数据处理)和俄罗斯GT重力技术公司的GT系列航空重力仪(其配套软件以Oasis商业软件为平台,借助平台软件功能模块,采用Kalman双向滤波进行数据处理),后者的测量精度可达0.6×10-5 m/s2 .基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等.三轴稳定平台与双轴稳定平台的区别在于三轴能使平台台体相对惯性空间保持方位稳定,既稳定平台在重力测量过程中始终保持与当地地理坐标系统一致,水平加速度改正过程不需要进行估算和坐标旋转进行投影. ...
航空重力测量研究进展
1
2004
... 航空重力测量系统技术研究最早开始于20世纪60年代,自20世纪90年代以来,随着DGPS技术的成熟和应用,航空重力测量系统技术得到快速发展[1 ,2 ,3 ] .到目前为止,俄罗斯、加拿大、美国和德国等先进国家已经有多款成熟产品在市场上销售和商业应用.根据采用稳定平台的不同,可以将航空重力测量系统分为双轴稳定平台式、三轴稳定平台式和捷联数学平台3种类型.基于双轴稳定平台航空重力仪的代表产品主要有美国Micro-g公司的TAGS-6(其配套软件以Matlab为基础,采用FIR低通滤波进行数据处理)、DGS公司的DGS、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,目前均已得到商业化应用,测量精度在1×10-5 m/s2 左右;基于三轴稳定平台航空重力仪的代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪(其数据处理软件采用FIR低通滤波进行数据处理)和俄罗斯GT重力技术公司的GT系列航空重力仪(其配套软件以Oasis商业软件为平台,借助平台软件功能模块,采用Kalman双向滤波进行数据处理),后者的测量精度可达0.6×10-5 m/s2 .基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等.三轴稳定平台与双轴稳定平台的区别在于三轴能使平台台体相对惯性空间保持方位稳定,既稳定平台在重力测量过程中始终保持与当地地理坐标系统一致,水平加速度改正过程不需要进行估算和坐标旋转进行投影. ...
航空重力测量研究进展
1
2004
... 航空重力测量系统技术研究最早开始于20世纪60年代,自20世纪90年代以来,随着DGPS技术的成熟和应用,航空重力测量系统技术得到快速发展[1 ,2 ,3 ] .到目前为止,俄罗斯、加拿大、美国和德国等先进国家已经有多款成熟产品在市场上销售和商业应用.根据采用稳定平台的不同,可以将航空重力测量系统分为双轴稳定平台式、三轴稳定平台式和捷联数学平台3种类型.基于双轴稳定平台航空重力仪的代表产品主要有美国Micro-g公司的TAGS-6(其配套软件以Matlab为基础,采用FIR低通滤波进行数据处理)、DGS公司的DGS、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,目前均已得到商业化应用,测量精度在1×10-5 m/s2 左右;基于三轴稳定平台航空重力仪的代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪(其数据处理软件采用FIR低通滤波进行数据处理)和俄罗斯GT重力技术公司的GT系列航空重力仪(其配套软件以Oasis商业软件为平台,借助平台软件功能模块,采用Kalman双向滤波进行数据处理),后者的测量精度可达0.6×10-5 m/s2 .基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等.三轴稳定平台与双轴稳定平台的区别在于三轴能使平台台体相对惯性空间保持方位稳定,既稳定平台在重力测量过程中始终保持与当地地理坐标系统一致,水平加速度改正过程不需要进行估算和坐标旋转进行投影. ...
航空重力测量理论、方法及应用研究
1
2004
... 航空重力测量系统技术研究最早开始于20世纪60年代,自20世纪90年代以来,随着DGPS技术的成熟和应用,航空重力测量系统技术得到快速发展[1 ,2 ,3 ] .到目前为止,俄罗斯、加拿大、美国和德国等先进国家已经有多款成熟产品在市场上销售和商业应用.根据采用稳定平台的不同,可以将航空重力测量系统分为双轴稳定平台式、三轴稳定平台式和捷联数学平台3种类型.基于双轴稳定平台航空重力仪的代表产品主要有美国Micro-g公司的TAGS-6(其配套软件以Matlab为基础,采用FIR低通滤波进行数据处理)、DGS公司的DGS、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,目前均已得到商业化应用,测量精度在1×10-5 m/s2 左右;基于三轴稳定平台航空重力仪的代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪(其数据处理软件采用FIR低通滤波进行数据处理)和俄罗斯GT重力技术公司的GT系列航空重力仪(其配套软件以Oasis商业软件为平台,借助平台软件功能模块,采用Kalman双向滤波进行数据处理),后者的测量精度可达0.6×10-5 m/s2 .基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等.三轴稳定平台与双轴稳定平台的区别在于三轴能使平台台体相对惯性空间保持方位稳定,既稳定平台在重力测量过程中始终保持与当地地理坐标系统一致,水平加速度改正过程不需要进行估算和坐标旋转进行投影. ...
航空重力测量理论、方法及应用研究
1
2004
... 航空重力测量系统技术研究最早开始于20世纪60年代,自20世纪90年代以来,随着DGPS技术的成熟和应用,航空重力测量系统技术得到快速发展[1 ,2 ,3 ] .到目前为止,俄罗斯、加拿大、美国和德国等先进国家已经有多款成熟产品在市场上销售和商业应用.根据采用稳定平台的不同,可以将航空重力测量系统分为双轴稳定平台式、三轴稳定平台式和捷联数学平台3种类型.基于双轴稳定平台航空重力仪的代表产品主要有美国Micro-g公司的TAGS-6(其配套软件以Matlab为基础,采用FIR低通滤波进行数据处理)、DGS公司的DGS、俄罗斯圣彼得堡科学研究中心电气仪表所的Chekan-AM海/空重力仪等,目前均已得到商业化应用,测量精度在1×10-5 m/s2 左右;基于三轴稳定平台航空重力仪的代表产品主要有加拿大Sander Geophysics Limited(SGL)公司的AIRGrav航空重力仪(其数据处理软件采用FIR低通滤波进行数据处理)和俄罗斯GT重力技术公司的GT系列航空重力仪(其配套软件以Oasis商业软件为平台,借助平台软件功能模块,采用Kalman双向滤波进行数据处理),后者的测量精度可达0.6×10-5 m/s2 .基于捷联数学平台的航空重力仪代表样机主要有俄罗斯重力测量技术公司的GT-X、加拿大Calgary大学的SISG和德国iMar公司等.三轴稳定平台与双轴稳定平台的区别在于三轴能使平台台体相对惯性空间保持方位稳定,既稳定平台在重力测量过程中始终保持与当地地理坐标系统一致,水平加速度改正过程不需要进行估算和坐标旋转进行投影. ...
航空/海洋重力测量仪器发展综述
2
2017
... 目前在国内中国自然资源航空物探遥感中心、中国人民解放军国防科技大学、北京航天控制仪器研究所等均开展了捷联航空重力仪的研制,研制出工程样机测量精度达到1×10-5 m/s2 .北京自动化控制设备研究所采用与AIRGrav重力仪基本一致的“三轴稳定平台+石英挠性加速度计重力传感器”方案,经静态和船载海洋动态测量试验表明,其测量精度可达1×10-5 m/s2 [4 ] .此外,中国科学院测量与地球物理研究所、总参测绘研究所、船舶重工集团707所也相继开展了海/空重力仪的研制工作. ...
... 航空重力测量中GNSS天线安装位置位于飞机的上部,而重力仪安装在机舱内部,因此重力传感器中心与GNSS天线相位中心不一致.载体飞行产生俯仰和横滚运动时,重力传感器中心与GNSS天线相位中心的速度和加速度也存在差异.为了计算重力传感器中心处的各种扰动加速度,需在GNSS确定的相应量中进行偏心改正.偏心改正除位置因素外,主要源于飞机姿态变化,故也称之为姿态改正[4 ] . ...
航空/海洋重力测量仪器发展综述
2
2017
... 目前在国内中国自然资源航空物探遥感中心、中国人民解放军国防科技大学、北京航天控制仪器研究所等均开展了捷联航空重力仪的研制,研制出工程样机测量精度达到1×10-5 m/s2 .北京自动化控制设备研究所采用与AIRGrav重力仪基本一致的“三轴稳定平台+石英挠性加速度计重力传感器”方案,经静态和船载海洋动态测量试验表明,其测量精度可达1×10-5 m/s2 [4 ] .此外,中国科学院测量与地球物理研究所、总参测绘研究所、船舶重工集团707所也相继开展了海/空重力仪的研制工作. ...
... 航空重力测量中GNSS天线安装位置位于飞机的上部,而重力仪安装在机舱内部,因此重力传感器中心与GNSS天线相位中心不一致.载体飞行产生俯仰和横滚运动时,重力传感器中心与GNSS天线相位中心的速度和加速度也存在差异.为了计算重力传感器中心处的各种扰动加速度,需在GNSS确定的相应量中进行偏心改正.偏心改正除位置因素外,主要源于飞机姿态变化,故也称之为姿态改正[4 ] . ...
3
2010
... 参考椭球面的正常重力场采用CGS2000正常重力公式[5 ] : ...
... 自由空间改正的计算公式为[5 ] : ...
... 在航空重力测量时,重力仪不仅受到地球自转产生的离心力的影响,还受到载体速度产生的附加离心力的影响,这种影响就是厄特缶斯效应.厄特缶斯改正的数学模型是由匈牙利学者Eotvos首先推导并于1919年用实验方法证实,其严密计算公式为[5 ,6 ] : ...
3
2010
... 参考椭球面的正常重力场采用CGS2000正常重力公式[5 ] : ...
... 自由空间改正的计算公式为[5 ] : ...
... 在航空重力测量时,重力仪不仅受到地球自转产生的离心力的影响,还受到载体速度产生的附加离心力的影响,这种影响就是厄特缶斯效应.厄特缶斯改正的数学模型是由匈牙利学者Eotvos首先推导并于1919年用实验方法证实,其严密计算公式为[5 ,6 ] : ...
航空重力测量中厄特弗斯改正的计算与误差分析
1
1999
... 在航空重力测量时,重力仪不仅受到地球自转产生的离心力的影响,还受到载体速度产生的附加离心力的影响,这种影响就是厄特缶斯效应.厄特缶斯改正的数学模型是由匈牙利学者Eotvos首先推导并于1919年用实验方法证实,其严密计算公式为[5 ,6 ] : ...
航空重力测量中厄特弗斯改正的计算与误差分析
1
1999
... 在航空重力测量时,重力仪不仅受到地球自转产生的离心力的影响,还受到载体速度产生的附加离心力的影响,这种影响就是厄特缶斯效应.厄特缶斯改正的数学模型是由匈牙利学者Eotvos首先推导并于1919年用实验方法证实,其严密计算公式为[5 ,6 ] : ...
航空重力数据窗函数法FIR低通数字滤波实验
1
2007
... 航空重力测量数据经过各项改正后还包含有载体的高频振动将对测量数据产生噪声影响.为了在强噪声背景下提取微弱的重力异常信号,需要采用一些滤波方法,通常采用有限冲激响应FIR(finite impulse response)低通滤波[7 ,8 ,9 ] 和Kalman平滑滤波. ...
航空重力数据窗函数法FIR低通数字滤波实验
1
2007
... 航空重力测量数据经过各项改正后还包含有载体的高频振动将对测量数据产生噪声影响.为了在强噪声背景下提取微弱的重力异常信号,需要采用一些滤波方法,通常采用有限冲激响应FIR(finite impulse response)低通滤波[7 ,8 ,9 ] 和Kalman平滑滤波. ...
航空重力数据的等波纹FIR 低通滤波试验
1
2012
... 航空重力测量数据经过各项改正后还包含有载体的高频振动将对测量数据产生噪声影响.为了在强噪声背景下提取微弱的重力异常信号,需要采用一些滤波方法,通常采用有限冲激响应FIR(finite impulse response)低通滤波[7 ,8 ,9 ] 和Kalman平滑滤波. ...
航空重力数据的等波纹FIR 低通滤波试验
1
2012
... 航空重力测量数据经过各项改正后还包含有载体的高频振动将对测量数据产生噪声影响.为了在强噪声背景下提取微弱的重力异常信号,需要采用一些滤波方法,通常采用有限冲激响应FIR(finite impulse response)低通滤波[7 ,8 ,9 ] 和Kalman平滑滤波. ...
航空重力测量中FIR低通滤波器的比较
1
2010
... 航空重力测量数据经过各项改正后还包含有载体的高频振动将对测量数据产生噪声影响.为了在强噪声背景下提取微弱的重力异常信号,需要采用一些滤波方法,通常采用有限冲激响应FIR(finite impulse response)低通滤波[7 ,8 ,9 ] 和Kalman平滑滤波. ...
航空重力测量中FIR低通滤波器的比较
1
2010
... 航空重力测量数据经过各项改正后还包含有载体的高频振动将对测量数据产生噪声影响.为了在强噪声背景下提取微弱的重力异常信号,需要采用一些滤波方法,通常采用有限冲激响应FIR(finite impulse response)低通滤波[7 ,8 ,9 ] 和Kalman平滑滤波. ...
航空重力数据去噪方法研究与GeoProbe平台插件实现
1
2018
... 笔者所采用的Kalman平滑算法是将高度、垂向加速度、重力异常、重力异常一阶导数作为被估计状态,根据飞行时传感器的受力状态构建数学模型,并用最小方差准则进行最优估计,进而去除重力仪和GNSS测量的随机噪声[10 ,11 ,12 ] . ...
航空重力数据去噪方法研究与GeoProbe平台插件实现
1
2018
... 笔者所采用的Kalman平滑算法是将高度、垂向加速度、重力异常、重力异常一阶导数作为被估计状态,根据飞行时传感器的受力状态构建数学模型,并用最小方差准则进行最优估计,进而去除重力仪和GNSS测量的随机噪声[10 ,11 ,12 ] . ...
航空重力数据Kalman滤波平滑技术应用研究
1
2012
... 笔者所采用的Kalman平滑算法是将高度、垂向加速度、重力异常、重力异常一阶导数作为被估计状态,根据飞行时传感器的受力状态构建数学模型,并用最小方差准则进行最优估计,进而去除重力仪和GNSS测量的随机噪声[10 ,11 ,12 ] . ...
航空重力数据Kalman滤波平滑技术应用研究
1
2012
... 笔者所采用的Kalman平滑算法是将高度、垂向加速度、重力异常、重力异常一阶导数作为被估计状态,根据飞行时传感器的受力状态构建数学模型,并用最小方差准则进行最优估计,进而去除重力仪和GNSS测量的随机噪声[10 ,11 ,12 ] . ...
平台式重力仪测量数据的卡尔曼滤波处理
1
2015
... 笔者所采用的Kalman平滑算法是将高度、垂向加速度、重力异常、重力异常一阶导数作为被估计状态,根据飞行时传感器的受力状态构建数学模型,并用最小方差准则进行最优估计,进而去除重力仪和GNSS测量的随机噪声[10 ,11 ,12 ] . ...
平台式重力仪测量数据的卡尔曼滤波处理
1
2015
... 笔者所采用的Kalman平滑算法是将高度、垂向加速度、重力异常、重力异常一阶导数作为被估计状态,根据飞行时传感器的受力状态构建数学模型,并用最小方差准则进行最优估计,进而去除重力仪和GNSS测量的随机噪声[10 ,11 ,12 ] . ...
航空重力重复线测试数据质量评价方法研究
1
2008
... 2017年11月在某海域进行了新研制的三轴稳定平台航空重力仪的首次测试飞行,完成了EW方向的3个架次和SN方向的一个架次重复线飞行.通过研制的平台式航空重力数据处理软件对测量的数据进行了处理与分析.航空重力测量数据经过各项改正及FIR低通滤波后获得空间重力异常,经水平调整后进行内符合精度统计[13 ,14 ] ,并和GT航空重力测量系统同位置测量获得的空间重力异常进行了对比. ...
航空重力重复线测试数据质量评价方法研究
1
2008
... 2017年11月在某海域进行了新研制的三轴稳定平台航空重力仪的首次测试飞行,完成了EW方向的3个架次和SN方向的一个架次重复线飞行.通过研制的平台式航空重力数据处理软件对测量的数据进行了处理与分析.航空重力测量数据经过各项改正及FIR低通滤波后获得空间重力异常,经水平调整后进行内符合精度统计[13 ,14 ] ,并和GT航空重力测量系统同位置测量获得的空间重力异常进行了对比. ...
航空重力测量内符合精度计算方法
1
2010
... 2017年11月在某海域进行了新研制的三轴稳定平台航空重力仪的首次测试飞行,完成了EW方向的3个架次和SN方向的一个架次重复线飞行.通过研制的平台式航空重力数据处理软件对测量的数据进行了处理与分析.航空重力测量数据经过各项改正及FIR低通滤波后获得空间重力异常,经水平调整后进行内符合精度统计[13 ,14 ] ,并和GT航空重力测量系统同位置测量获得的空间重力异常进行了对比. ...
航空重力测量内符合精度计算方法
1
2010
... 2017年11月在某海域进行了新研制的三轴稳定平台航空重力仪的首次测试飞行,完成了EW方向的3个架次和SN方向的一个架次重复线飞行.通过研制的平台式航空重力数据处理软件对测量的数据进行了处理与分析.航空重力测量数据经过各项改正及FIR低通滤波后获得空间重力异常,经水平调整后进行内符合精度统计[13 ,14 ] ,并和GT航空重力测量系统同位置测量获得的空间重力异常进行了对比. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}