
0 引言
无人机航空磁测是无人机与航空物探仪器设备结合形成的一种新兴的航空磁测技术。由于无人机航磁系统具备体积小,重量轻,生产成本低,可昼夜飞行等特点,日益受到航空地球物理从业者的关注与青睐[1,2,3]。近十年来,先后有英国 Magsurvey公司,荷兰Fugro公司,美国卡尔顿大学等选用不同型号的固定翼无人飞行平台,研发无人机航空磁测技术[4,5,6,7,8,9]。中国地质科学院地球物理地球化学勘查研究所成功研发的“彩虹-3”无人机航空物探系统,也在航磁勘查中取得了良好的应用效果[10,11,12]。无人直升机作为无人机里的一个重要分支,因其强大的灵活性,复杂地形的适用性,可垂直起降等优点,正逐渐被国内重视。
笔者采用无人直升机搭载航磁仪器集成开发出无人直升机航磁测量系统,本系统具有高精度、稳定高效、低空低速等特点,无跑道需求,机动性高,能够在不同地形区域进行航磁测量。2017年本系统试验飞行取得成功,现已在平原、丘陵和低山地区开展过航磁测量工作,均取得了较好的勘查效果。
1 系统构成
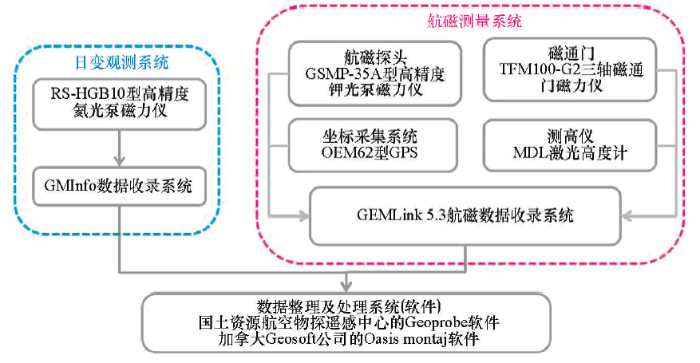
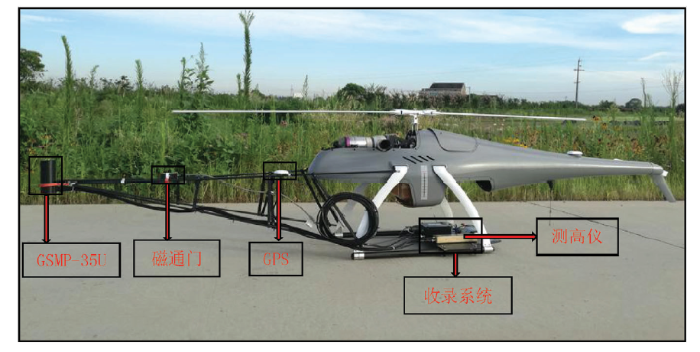
无人直升机航磁测量系统由无人直升机和航空磁测系统组成。航空磁测系统包括GSMP-35A型高精度钾光泵磁力仪、OEM62型GPS仪、MDL激光高度计以及地面磁日变观测站。GSMP-35A型高精度钾光泵磁力仪由钾光泵磁探头,磁通门和数据收录系统组成,见图1。
图1
1.1 飞行平台
飞行平台采用涡轮轴动力无人驾驶直升机,机身尺寸:3 000 mm×550 mm×800 mm,旋翼直径 2 600 mm。巡航速度50 km/h,标准续航时间50 min。配备移动地面指挥系统,自主起降,航点导航。技术指标见表1。
表1 无人直升机主要技术指标
Table1
| 参数 | 指标 |
|---|---|
| 最大安全起飞重量 | 40 kg |
| 空机重量 | 16 kg |
| 飞行高度 | ≤4 000 m |
| 工作温度 | -20℃~50℃ |
| 抗风性能 | 风速≤14 m/s |
1.2 航空磁测仪
航空磁测仪器采用GSMP-35A型钾光泵磁力仪,测量范围20 000~100 000 nT,分辨率0.0001 nT,绝对精度±0.1 nT,探头方向差±0.05 nT,采样率1、5、10、20 Hz可选。
磁通门磁力仪采用的是TFM100-G2型三轴磁通门磁力仪,测量范围±100 μT,采样率10 Hz。
数据收录系统通过串口线连接计算机,运行GEMLink 5.3航磁测量系统软件,能够实时采集钾光泵磁力仪总场数据、飞机实时坐标位置数据等。
1.3 地面磁日变观测站
采用RS-HGB10型高精度氦光泵磁力仪。数据收录采用 Windows XP Embedded 计算机操作系统,运行GMInfo航磁测量系统软件,实时采集氦光泵磁力仪总场数据。
2 无人机磁干扰试验
图2
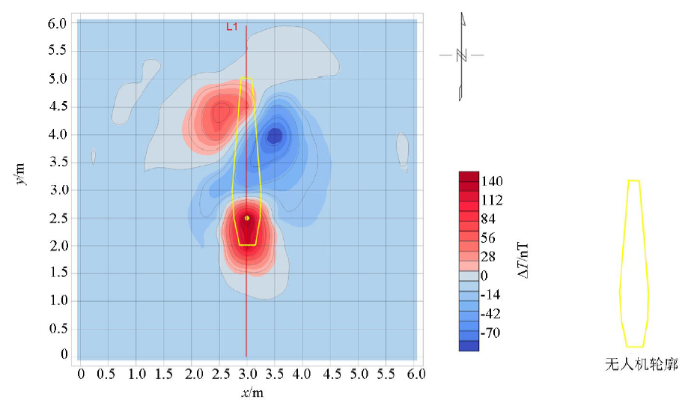
图3
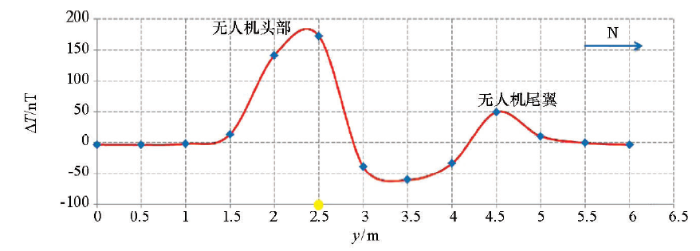
图3
L1线ΔT曲线图(黄点为发动机位置)
Fig.3
Magnetic graph of L1 line (yellow spot for engine position)
为进一步了解无人机发动机工作及螺旋桨旋转时产生的磁干扰情况,在无人机工作状态下进行磁场值测量,令无人机在发动机3 000 r/min、螺旋桨500 r/min时进行测量。同样无人机头朝向正南方向,在距离无人机发动机分别为1.0、1.5、2.0、2.5、3.0、3.5 m处测量其磁场值。
无人直升机工作时不同距离下磁场值结果如图4,无人直升机的磁干扰随测距呈指数下降,当距离无人直升机发动机2 m时,无人直升机自身的磁干扰衰减到仅为2.5 nT。
图4
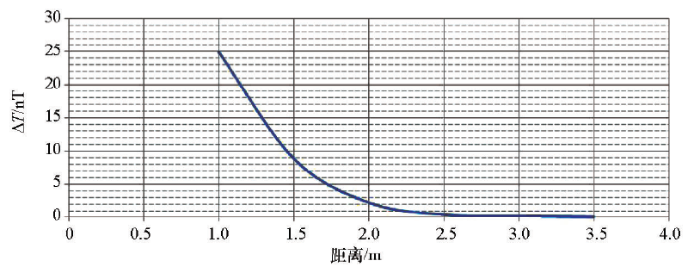
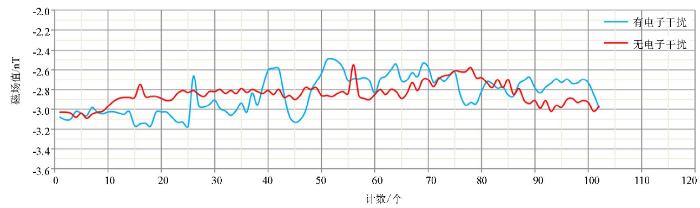
同时,测试了无人机通讯设备对磁测量的影响(图5),探头放置在距无人直升机发动机2 m处。当有通讯信号时,短时间内磁场变化最大值仅增加0.14 nT,表明此处无人直升机通讯系统的磁干扰很小。
图5
3 系统集成
图6
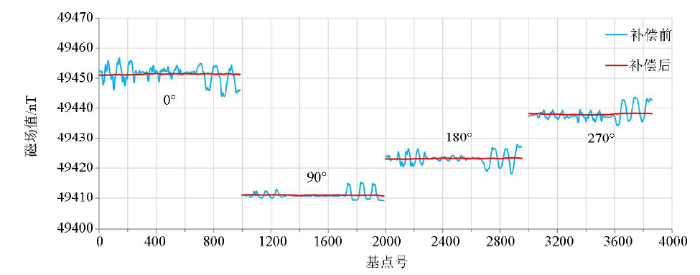
图7
4 磁补偿试验
为消除无人直升机对磁测量的干扰,获得高质量的地磁场数据,需进行磁补偿试验。
第一步是消除恒定磁场和感应磁场的干扰。试验采用定点补偿飞行,选择场地为磁场梯度变化不大于1 nT/m的试验场地,无人直升机在人工操控飞行状态下,在60 m高度左右的固定点位按顺时针分别朝向0°、90°、180°、270°四个方向做俯仰(±5°)、摇摆(±10°)和偏航(±5°)三组机动动作,每组机动动作持续时间约30 s。
第二是消除磁测方向差干扰。选择磁场平稳场地进行时十字剖面飞行,计算0°、90°、180°、270°四个方向中心点处达到同一磁场水平时在各方向上的差值,校正结果见图8。
图8
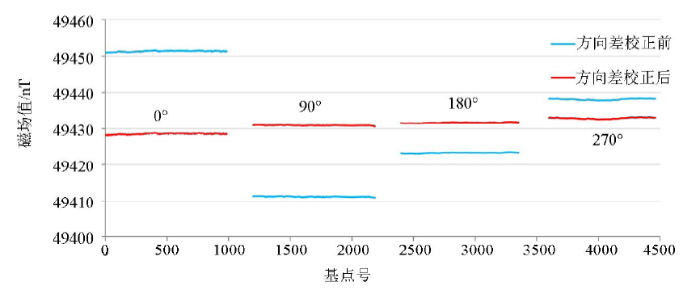
图8
方向差校正前后磁异常曲线
Fig.8
Magnetic field before and after heading-error correction
5 野外应用测试
2018年应用本系统在安徽省某测区开展了1∶10 000比例尺的应用飞行测量工作。测区内地形相对较复杂,植被覆盖程度高,区内有数个采坑,在该区域开展地面磁测工作难度大。
区内地层为第四系及白垩系下统大王山组,区内褶皱及断裂发育,构造总体走向为NEE向和NE向,同时区内岩浆活动强烈,岩性以闪长玢岩为主,区内矿床主要为玢岩型磁铁矿。本工作测线方向为SN向,飞行方向角为0°和180°,线距100 m;切割线飞行方向垂直于主测线,布置为EW向,方向角为90°和270°,线距为600 m。本次试验飞行共完成112 km,飞行时间3.6 h,生产效率为31 km/h,数据采样率为10 Hz。
本系统获得的航磁图与19世纪50年代安徽省地质局在测区开展的1∶1万地磁成果进行了对比,如图9所示。
图9
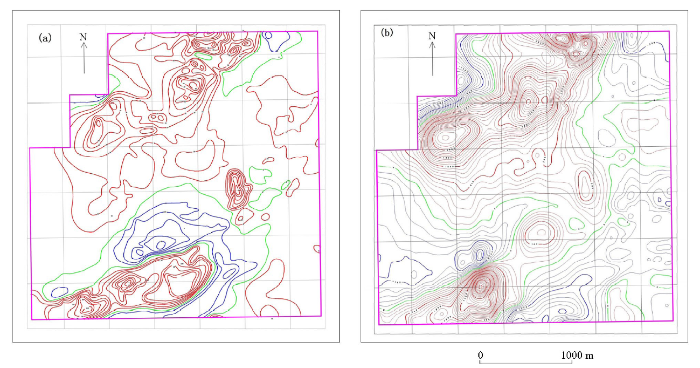
图9
以往磁测(a)与本次航磁(b)平面等值线对比
Fig.9
Comparisons between previous magnetic field (a) and the present result (b)
本次航磁图所获得主体异常的位置、分布范围与以往磁测图基本一致,但本次测量航磁异常更加完整、清晰和精细,成图质量更好。需要说明的是,由于近年来测区内磁铁矿的开采,致使本次测量的磁异常在部分细节上表现与以往磁测图有所区别。
6 结论
根据无人直升机磁干扰试验结果,并结合无人直升机性能特点,开展了无人直升机航磁测量系统的集成研究,完成了无人直升机航磁系统的集成。开展了磁补偿试验,补偿后标准差为±0.02 nT,改善率为18.06。随后在野外开展了应用飞行测量工作,效果较好,测量结果满足了航磁规范的要求。
相对于地面磁测技术方法,本系统可以在地形条件复杂和环境恶劣区域,如茂密森林、沙漠、戈壁滩、大面积水域等开展航磁测量工作,可以大大减小勘探人员的工作强度,测量效率高,安全快捷,使用简单,绿色经济。
无人直升机航磁测量系统作为有人机航磁的有益补充,提供了一种更加灵活、安全、高效,且成本更低的航空物探设备。随着勘探仪器数字集成化程度的不断提高和无人直升机技术的日益成熟,该系统将有可能在固体矿产勘探、基础地质调查、环境地质调查等领域发挥更大的作用。
参考文献
2000年来西方国家航空物探技术的若干进展
[J].
DOI:10.3969/j.issn.1000-8918.2007.01.001
URL
[本文引用: 1]

综述了2000年来西方国家航空物探技术的新进展,介绍了最新的航空磁力仪、航空伽马能谱仪、航空电磁仪、航空重力测量系统、无人机航空物探系统以及数据处理软件系统等。
Recent advances in aerogeophysical techniques used abroad
[J].
“十五”以来我国航空物探进展与展望
[J].
DOI:10.3969/j.issn.1000-8918.2007.06.001
URL
Magsci
[本文引用: 1]
<p>对"十五"以来我国国土资源系统航空物探的工作概况、主要技术进展与应用成果进行了简要回顾,并对今后我国航空物探的发展趋势进行了分析与预测.</p>
The advances of aerogeophysical survey in China since the tenth five year plan and its development trend
[J].
无人机航空物探技术研究应用现状与展望
[J].
DOI:10.3969/j.issn.1001-1749.2016.06.05
URL
[本文引用: 1]
缺少飞行平台是目前我国进行复杂地形条件下物探数据获取的主要瓶颈之一,而无人机作为一种成本低、操作灵活、无人员伤亡危险的空中移动探测平台,正好满足高效率资源勘查的需要。近年来,国内、外航空物探飞行平台从传统的有人机向无人机发展已经取得了一定成果。这里分别介绍了国内、外无人机航空物探研发及应用现状,以及国内自主技术的无人机航空物探应用成果,分析了目前无人机航空物探存在的主要优势及不足,并对无人机航空物探的发展前景进行了分析与展望。
The R&D application of UAV airborne geophysical survey and its development trend
[J].
GeoRangeraeromagnetic UAV:development to commercial survey
[R].
Autonomous airborne geomagnetic surveying and target identification
[EB /OL].
Use of unmanned air vehicles in oil,gas and mineral exploration activities
[C]//
Austin’ subsidiary, Universal Wing Geophysics Corp. Completes arctic furvey, accepts mineral exploration contract,plans offshore oil survey test[R]
An aeromagnetic survey of Shinmoe-dake volcano,Kirishima,Japan,after the 2011 eruption using an unmanned autonomous helicopter
[J].
DOI:10.5047/eps.2013.03.005
URL
[本文引用: 1]
In January 2011, magmatic eruptions at Shinmoe-dake, Kirishima, Japan, started for the first time in 300 years. After three sub-plinian explosive events, lava accumulation started at the summit crater. The accumulation lasted for about three months, and the final volume of the accumulated lava reached 1.5 x 10(7) m(3). We conducted aeromagnetic surveys using an unmanned autonomous helicopter over the Shinmoe-dake summit crater in late May 2011, and late October to early November, 2011, in order to investigate the magnetization of this area and changes in the magnetic field associated with the 2011 eruption. The averaged magnetization intensity around Shinmoe-dake is 1.5 A/m. A demagnetized area elongated in the north to northwest direction from Shinmoe-dake has been detected. We also detected a clear change in the total magnetic field between the two aeromagnetic observations characterized by positive and negative changes in the south and north, respectively, of the Shinmoe-dake edifice. These changes are well reproduced by a model in which 20-70% of lava accumulated in the summit crater was cooled down below the Curie temperature and has been magnetized.
Aeromagnetic survey using an unmanned autonomous helicopter over Tarumae Volcano, northern Japan
[J].DOI:10.1071/EG12087 URL [本文引用: 1]
自主技术无人机航空物探(磁/放)综合站研发进展
[J].
DOI:10.3975/cagsb.2014.04.01
URL
[本文引用: 1]
无人机航空物探技术是航空物探技术的一个新兴分支。文章首先阐述了无人机航空物探技术的国内外研发情况,然后介绍了基于国产彩虹3无人机的国内首套应用于地球物理勘查的无人机航空物探(磁/放)综合站的研究进展。基于国产彩虹3无人机平台,开展了专用飞机改装、超低空地形跟随飞控、远距离遥控遥测等关键技术攻关,集成研发了自主知识产权的无人机航空物探(磁/放)综合站样机,成功开展了面积性应用试验,综合站样机功能、性能等达到了世界先进水平。无人机航空物探(磁/放)综合站研发取得关键进展。
The progress in the development of the integrated UAV magnetic & radiation survey system
[J].
新型无人机航磁系统在多宝山矿区的应用试验
[J].
DOI:10.11720/wtyht.2014.4.38
URL
Magsci
[本文引用: 1]
通过气动外形、电磁兼容、数据传输、信息处理、传感器结构设计等关键技术攻关,基于彩虹三国产长航时无人机平台,集成了一套新型固定翼无人机航空磁测系统,在黑龙江省嫩江县多宝山矿区开展了1:1万大比例尺航磁测量试验,验证了全自主飞行、高精度测控、超低空地形跟随、全天候作业等关键性能,介绍了本次试验的结果及与有人机航磁系统的应用效果对比,标志我内首次使用无人机进行面积性高精度航磁测量获得成功。
Trial survey of a novel UAV-borne magnetic system in the Duobaoshan ore district
[J].
国内主要航空物探飞行平台特点及发展
[J].
DOI:10.11720/wtyht.2014.6.02
URL
Magsci
[本文引用: 1]
航空物探是将航空地球物理勘探仪器搭载在不同飞行器上,通过特定的飞行作业方式开展的地球物理勘查技术。航空物探的勘查效果同时受物探仪器性能和所采用的飞行平台及其飞行控制效果的双重影响。根据不同的需求,合理地选择并运用飞行器,是开展航空物探测量工作需要解决的首要任务。笔者在回顾国内航空物探发展的基础上,将主要使用的航空物探飞行器分为固定翼、直升机、无人机及其他等四类,分析每类飞行器作为航空物探搭载平台的优缺点,从持续服务地质勘查的需要出发,展望了航空物探及搭载平台的主要发展方向。
The features of the main airborne geophysical flying-platforms in China and the development trend
[J].
AS350B3飞机航磁测量前支杆方式仪器安装位置的探讨
[J].
DOI:10.3969/j.issn.1001-1749.2014.04.09
URL
[本文引用: 1]
航空物探事业在不断地发展,由于受到地形和起降场的限制,使用旋翼飞机进行航空物探作业越来越多,但目前旋翼飞机对探头的干扰很大,具体是那些因素引起的干扰还不被很多人认识,磁探头如何安装,安装在飞机的那些位置也没有科学的理论依据。针对以上问题,这里对AS350B3飞机在航空物探飞行中运用前支杆安装方式进行了探讨,对取得的数据进行了认真仔细地分析,通过实践数据验证了这种安装方式的可靠性和稳定性。
AS350 B3 aircraft in aeromagnetic survey in front support rod installation mode research and practice
[J].
16项自动磁补偿系统
[J].
16 items of automatic magnetic compensation system
[J].
固定翼无人机航磁探测系统的磁补偿模型分析
[J].
DOI:10.7527/S1000-6893.2016.0059
URL
[本文引用: 1]
近年来,无人机的应用日益广泛,逐渐用于航空物探。在使用固定翼无人机搭载磁力仪进行航磁测量时,必然引入飞行平台干扰,包括与机动无关的干扰和与机动有关的干扰。去除和飞机机动有关的磁干扰,即为磁补偿工作。航磁补偿的经典TOLLES-LAWSON模型将磁干扰分为剩余磁场、感应磁场和涡流磁场。对于固定翼无人机,涡流磁场可以不考虑,将剩余磁场和感应磁场合称为稳态干扰场。主要对飞机干扰的来源和性质进行分析,并在地面设计实验验证铁磁性材料的性质,以加深对磁补偿模型的假设和推导过程的理解。最后,在地面实验平台上测量了飞机磁干扰场的平面分布图,指导航空磁力仪的安装。在将TOLLES-LAWSON模型应用于固定翼无人机航磁探测系统的磁补偿工作时,无人机与有人机相比,在结构和材料方面都有较大差异,因此对模型的物理意义和假设条件的深入理解至关重要,此即本文所述工作成果的出发点。
Analysis on magnetic compensation model of fixed-wing UAV aeromagnetic detection system
[J].
无人机磁航向测量的自动罗差补偿研究
[J].
DOI:10.3321/j.issn:1000-6893.2007.02.031
URL
Magsci
[本文引用: 1]
利用地球磁场测量无人机的航向时,需要对机上铁磁材料引起的罗差进行补偿。为了降低补偿费用,减小补偿试验时周围环境的影响,提出一种利用飞机左右盘旋飞行时采样数据实现罗差自动补偿的方法。采用椭圆假设算法,可利用飞机平飞时在多于5个不同方向的采样数据来自动补偿平飞时的罗差。在任意姿态飞行时,把飞机左右盘旋时采样的数据分解为4个椭圆,并求出它们相对于椭圆假设的24个系数。再利用这24个系数和飞机的俯仰角、倾斜角以及地磁场垂直分量求出任意姿态下罗差补偿所需的12个系数。实验结果表明,该方法效果良好,方便可行。某无人机补偿前最大误差为21.5°;用传统方法补偿后最大误差为2.3°;用本文方法几乎不需要额外的费用,补偿后最大误差为1.6°。
Study on automatic magnetic deviation compensation of magnetic heading measurement for UAV
[J].
运5飞机上航磁梯度测量系统的安装与补偿
[J].
DOI:10.3969/j.issn.1000-8918.2006.03.009
URL
Magsci
[本文引用: 1]
<p>介绍了在单阀双翼的运五飞机上安装既可进行垂直梯度测量,又可进行水平梯度测量(包括横向和纵向水平梯度测量)的航磁梯度测量系统的方法,初步探讨应用航空地球物理综合测量系统(AADCⅡ)自动航空磁力数字补偿仪的方法,并对补偿结果进行评价。多次实验结果证明了该补偿方法的效果良好。</p>
The assembly and compensation of the aeromagnetic gradient system on the y-5 aircraft
[J].
载体干扰磁场补偿办法
[J].
DOI:10.3969/j.issn.1001-2486.2013.03.002
URL
[本文引用: 1]
获得载体航行路径上各点地磁场的精确测量值是地磁匹配导航的前提,而载体上各种干扰磁场的存在会引起磁力仪输出的偏差,影响匹配的精度,因此必须对载体干扰磁场进行补偿。在分析载体干扰磁场特性的基础上,提出利用矢量测量值对地磁场总场值进行补偿的方法。该方法首先根据矢量磁力仪的测量模型得到关于载体磁场参数的非线性方程,然后采用非线性参数估计方法估计出精确的载体干扰磁场系数,最后再利用估计结果对测量值进行补偿。 通过仿真对该方法的有效性进行研究,并设计了半实物实验对其实用性进行验证。结果表明采用本文提出的方法补偿后地磁场总场值的测量误差在20nT以内,而且该方法参数估计精度高,应用方便,可以有效地对导航载体干扰磁场进行补偿。
The vehicle interferential magnetic field compensation method
[J].
航磁软补偿质量评价方法及软件实现
[J].
DOI:10.11720/j.issn.1000-8918.2013.6.13
URL
Magsci
[本文引用: 1]
《航空磁测技术规范》(DZ/T 1402-2010)对航磁软补偿质量给出了具体的指标要求,但没有明确航磁软补偿质量的评价方法,笔者在借鉴航磁自动数字补偿仪DSC-1的评价方法基础上,提出利用补前磁总场和补后磁总场进行事后评价的方法,并编制了软件,为软补偿质量的统一评价提供了可能。
The method of quality assessment for digital magnetic compensation and software realization
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}