
0 引言
为解决上述问题,本文采用新型声学释放装置方案,设计了新型声学释放器的控制电路和机械结构。整个装置满足既定释放功能的同时,提供释放过程的反馈信息,使其工作更加稳定可靠。
1 新型声学释放装置方案设计
表1 传统声学释放装置同新型声学释放装置参数对比
| 产品 | 材质 | |||||
|---|---|---|---|---|---|---|
| OCEANO 500 | 0.2 | 0.4 | 316L | 6.5 | 2 | 564×140 |
| 865-A | 5 | 12 | 316L | 33 | 25 | 660×150 |
| SYSAR 1461 | 4.2 | 4 | 316L | 25 | 20 | 460×135 |
| 7710 | 1.2 | 6 | 316L | 22 | 17 | 695×142 |
| 新型声学释放器 (释放装置) | 1 | 不限 | 316L | 2.43 | 1.98 | 170×100 |
2 控制电路总体设计
本部分着重研究声学释放器整个水下机系统的控制电路,对水下机其他模块的设计与制作已超出本文所要讨论的范畴,在此不详细说明。为了便于对控制电路部分功能的设计和调试,选用iXBlue公司推出的AR8x1_OEM板(简称OEM板),作为新型声学释放器的信号解调模块。
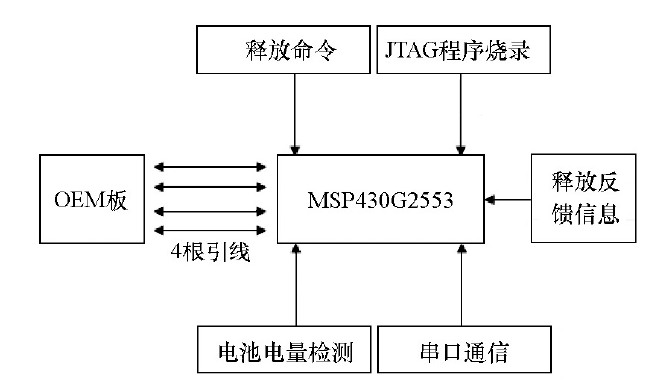
通过控制电路的硬件设计,能够实现控制释放、反馈信息交互、电池电量检测、串口通信和JTAG程序下载烧录等功能;控制电路通过对OEM板外接引线进行读写操作,可实现控制电路与声学释放器水下系统的其他部分进行通信。
2.1 控制电路具体实施方案
控制电路采用外部中断触发唤醒的方式,没有收到有效命令时,处于休眠状态;接收到有效命令后,唤醒控制电路工作。另外,OEM板与主控电路之间采用光耦隔离,避开了两输入端电压不同的影响,提高了电路的稳定性和抗干扰能力。图1是控制电路的结构框图,以下将对各部分详细说明。
图1
2.1.1 OEM板与MSP430单片机的连接部分
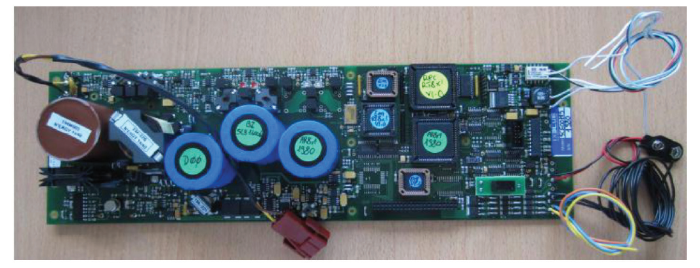
iXBlue公司推出的OEM板广泛应用于各类型号的声学释放器中,其稳定性与可靠性已经过大量实践验证。板上集成了DSP电路和发射变压器,能够捕捉深海环境下的微弱信号和发射FSK信号,从而实现与声学释放器水上机系统的通信。OEM板有4根外接线(红白、黑白、蓝白、绿白),控制电路通过对这4根外接线的读写来完成释放器的相关功能,图2为OEM板实物图。
图2
有效释放命令来临时,红白和黑白引线之间产生6 V电压,通过光耦隔离,右边与单片机外接的引线置低电平。利用这个信号,可以编写程序,唤醒单片机进行工作。电路如图3所示。
图3
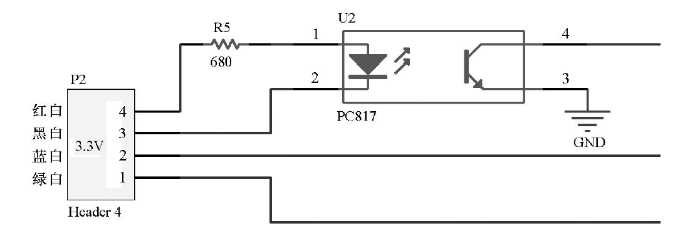
OEM板剩余的两根外接引线,蓝白是外部输入口,实现单片机对OEM板信息传递;绿白是内部输出口,实现OEM板对单片机信息传递。
2.1.2 控制电路释放部分
图4
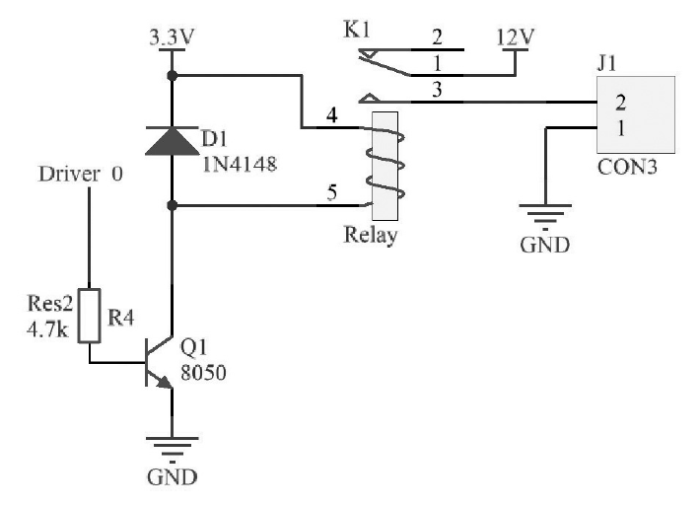
图5
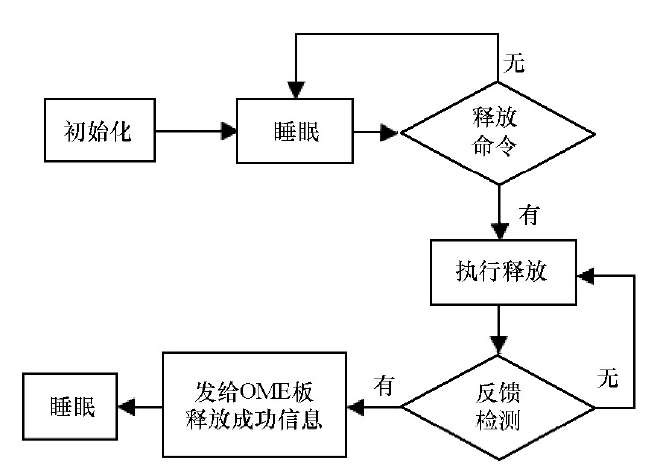
2.1.3 释放后反馈交互部分
图6
2.1.4 电池剩余电量检测部分
采用分压12 V直流电源的方式,得到单片机模数转换(A/D)可以采样的电压。通过编写程序,预设电路工作的最低电压,当单片机检测到这个下限值时,发出预警信号,传送给OEM板。
另外,由于电池电量的检测需要定期进行,在单片机休眠期间,利用时钟电路,可定时唤醒单片机进行测量,避免了逻辑冲突问题。
2.1.5 控制电路调试通信部分
调试通信部分包括串口通信和JTAG程序烧录。串口通信采用异步UART通信模式,选择ACLK作为时钟源,这使得单片机在LPM3模式下仍然能够使用串口。选用MAX3232用做单片机与DB9接头之间的电压转换芯片。该部分为常规设计电路部分,不再赘述。
3 机械结构设计
利用SolidWorks三维机械设计软件,设计了如图7所示的机械释放装置。
图7
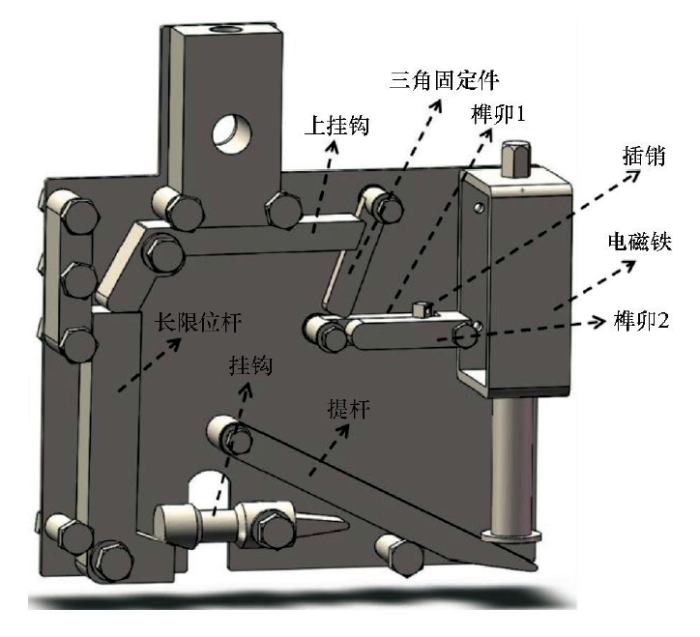
电磁铁推动杆的顶部与插销上面的小孔采用软连接,载物悬挂于挂钩上。插销固定时,各部件相互钳制,使整个装置保持稳定。释放过程,电磁铁工作,带动插销向上运动脱离榫卯1和榫卯2的连接处;整个装置受到载物重力作用下,榫卯1和2自由转动,从而三角固定件可以旋转;上挂钩受自身重力向下旋转,从而长限位杆和挂钩可绕固定点转动,使得重物脱离挂钩,完成释放动作。
图8
4 联调测试
电路焊接完成并且各项功能调试成功后,将其与机械结构、DC12V直流电源连接在一起,进行联调实验,测试既定功能,实物图见图9。
图9
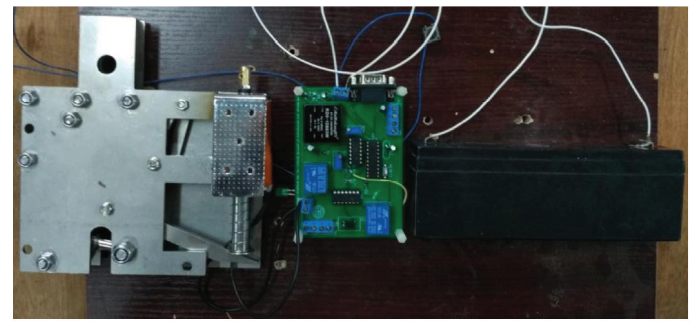
实验时,为避免电路故障,应首先连接电磁铁和OEM板的引线,最后连接电源接线。通过外接万用表,连接电池与控制电路的电源输入引线,来检测电流。预先检测电池的初始电压,从而可以计算功耗。OEM板外接引线是单片机的外部中断唤醒接口,也可通过外接接地开关来模拟这个信号。本文实验时就是采用模拟外部中断信号的方式。经过多次测试,得到控制电路的各项性能指标如下表所示。
室外的重物悬挂实验表明,设计的机械结构在悬挂200 kg重物条件下,经过多次测试,均能成功释放;同时,控制电路板上显示释放成功信号,实现了反馈交互功能,能够满足设计要求。 图10展示了实验过程。
图10

5 结论
新型声学释放器采用无密封的方式,有效地解决了现有声学释放器存在的体积大、重量大、成本高及动密封困难等问题。选用直流螺管式电磁铁提供声学释放器所需的驱动力,使其结构更加简单,易于控制且稳定可靠。
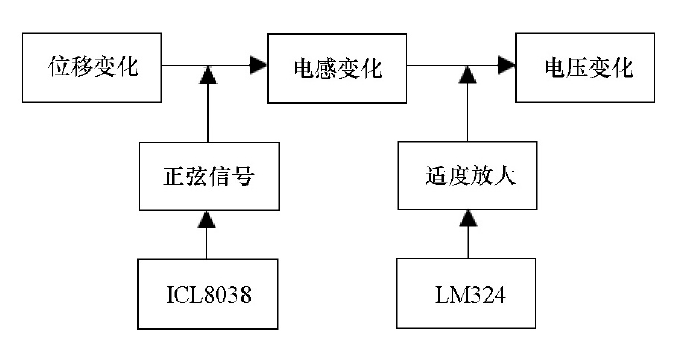
利用释放过程中电磁铁螺管线圈的电感变化,通过控制电路的一系列转换,可检测释放过程的反馈信息,实现了电磁铁控制接线的复用功能。
该装置相对于现有声学释放器除具有体积、 成本和重量等优势外,结构更加精巧,同时能够回收释放过程的反馈信息,值得深入研究和优化。可为进一步的声学释放器整体封装和设计,完成全深海的声学释放功能,提供有用参考。
参考文献
深水大地电磁数据采集的若干理论要点与仪器技术
[J].
DOI:10.6038/cjg20131102
URL
[本文引用: 1]

深水环境下进行大地电磁数据采集,信号幅值微弱,高频分量被严重衰减;仪器承载的环境压力巨大,且伴随底流推曳、淤泥吸附等不利因素;海上作业情况复杂多变,带给设备投放与回收诸多困难.针对这些特殊问题,从理论上分析了大地电磁场在海水及其以下层状介质中的传播规律,计算了电场与磁场随不同水深的衰变比值,研讨了与仪器上浮速度相关的物理因素;从技术上阐述海底大地电磁仪的工作原理,包括信号传感器、数据采集器、声控释放单元以及机械组装部件等等.整套仪器信号分辨率达到nV级,频带宽度为10~0.3×10-3 Hz,最大工作水深4000m.该仪器搭载"海洋六号"科学考察船,在我国南海中沙群岛海域进行了国内首次深水环境下的大地电磁数据采集试验.结果显示,所研发的仪器性能指标吻合先前的理论推算值,达到设计要求.我国的海底大地电磁探测技术已完全享有自主的知识产权.
海底大地电磁数据采集器
[J].
DOI:10.3321/j.issn:0001-5733.2003.02.014
URL
[本文引用: 1]
进行海底大地电磁数据采集,需借助于专用的水下探测设备. 虽然大地电磁测深法无论是仪器或是测量手段在陆地上的应用已较为成熟,但把该方法移植到海洋中,还需解决一些与海洋探测有关的工程技术问题. 主要包括:水下电场信号的提取,海底环境的监测,仪器在非实时监控运行中的纠错对策以及测量部件的密封承压等等. 在研制海底大地电磁数据采集器的过程中,采用先进的材料工艺,高精度的电子线路,可靠的软件编程以及牢固的器件安装结构,有效地解决了上述技术问题. 用所研制的仪器首次在我国海域进行了探测试验.
海底电磁接收机新进展
[J].
DOI:10.11720/wtyht.2016.4.27
URL
[本文引用: 2]
海洋电磁法广泛用于物理海洋学、地球物理学、水下目标检测等领域,以上研究及应用均建立在对海洋环境下的电磁场信号高精度观测基础上。用于海底电磁场高精度观测的海底电磁接收机,需要解决仪器的高可靠性投放回收、高稳定性水下作业、低噪声、大动态范围、低时漂等一系列技术难题。文中介绍了中国地质大学(北京)近些年来在海底电磁接收机研制方面为达到以上目标所取得的一些经验、成果以及最新进展。新海底电磁接收机的典型电场本底噪声为槡0.1 n V/m/√Hz@0.5 Hz,动态范围大于110 d B,时漂小于5 ms/day,与国外同类先进产品技术指标平齐。截止到2016年初,累计完成了约60站位的海底电磁数据采集作业,2012年以来接收机回收率达到100%,获取了多批次高质量的海底MT及CSEM资料,研制的接收机成功应用于水合物勘查及油气勘探领域。
集中式深水网箱群鱼群活动状态远程监测系统
[J].
DOI:10.6041/j.issn.1000-1298.2012.06.032
URL
[本文引用: 1]
为克服离岸深水网箱群养殖水域 环境和鱼群安全日常监测不便的问题,提出了一种集中式深水网箱群鱼群状态远程监测系统。采用水声多波束探测技术、多路信号处理技术设计了远程探测节点,用 于扫描各深水网箱内部空间;采用虚拟仪器技术设计了本地监控中心,便于用户集中控制远程探测节点、查看网箱探测结果;采用GPRS无线数据传输技术构建了 远程、实时的指令和数据传送通道。监测系统样机在福建省泉州市围头深水网箱养殖现场进行测试,结果表明:系统设计合理,操作方便,性能稳定、可靠,能够准 确及时地反馈养殖环境变化情况和网箱鱼群状态,减轻养殖工作量。
无密封电动机在深海声学释放器中应用的可行性研究
[J].
DOI:10.16791/j.cnki.sjg.2016.07.026
URL
[本文引用: 1]
分析了传统深海声学释放器存在体积大、重量大、成本高以及电机旋转式声学释放器存在的动密封困难等问题,提出了基于无密封电机的深海声学释放器总体方案设计,将控制电机置于承压密封舱外部以避开动密封困难的难题,并且减小声学释放器的体积和重量,降低成本。确定采用二相混合式步进电机作为声学释放器的控制电机,并从步进电机的结构、材质、工作原理等方面,讨论了深海条件下无密封步进电动机的耐压、绝缘、防腐等问题。经理论分析和盐水槽实验验证,在深海条件下基于无密封电机的声学释放器在中短期时间内可正常工作。
CTD电控多瓶采水器中电磁式释放机构设计与试验
[J].
DOI:10.3969/j.issn.1003-2029.2003.02.012
URL
[本文引用: 1]
文章概述了用电磁方式控制采水器释放机构的可行性 ,介绍了释放机构的工作原理、结构和特点 ,给出了应用实例试验中的测量方法和结果。
大功率高性能逆变器技术发展综述
[J].
DOI:10.3969/j.issn.1001-2095.2000.06.001
URL
[本文引用: 1]
本文对大功率高性能逆变器的主回路结构和普遍采用的 PWM控制技术进行了简要的回顾 ,并分析比较了已有诸多结构及控制方案的优缺点。最后 ,文章对大功率逆变器的发展前景进行了展望
直流螺管式电磁铁吸力经验公式的修正
[J].
DOI:10.3969/j.issn.1004-8332.2010.06.016
URL
[本文引用: 1]
采用电子天平研究了直流螺管式电磁铁的静态吸力特性,并将实验结果与经验公式计算值进行了对比研究,结果表明:实验值与公式计算值在大气隙范围内比较吻合,但气隙越小,偏差越大.为了得到受气隙影响较小的计算公式,对该经验公式进行了实验修正,验证了其可行性,并分析了实验误差.
螺管线圈传感器的线性范围研究
[J].
DOI:10.3969/j.issn.1000-9787.2004.08.005
URL
[本文引用: 1]
应用数值分析方法,研究了通电螺管线圈的绕制螺距与螺管线圈内部磁场感应强度分布之间的对应规律;提出采用按特定规律的变螺距螺管线圈,而不用传统均匀密绕的螺管线圈,电感位移传感器的线性输出范围与螺管线圈整体长度之比可以加大.实验结果证明:用最优化方法设计的变螺距线圈,使电感传感器的有效线性输出范围得到了显著的提高.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}