
0 引言
航空物探测量数据的总精度并不是通过重复检查观测数据的均方误差来计算,而是通过均匀分布全测区的测线与切割线在交叉点处观测数据差值的均方误差来计算。航空磁测中通常也需要进行一些重复线测量,但在以往规范中对重复线测试数据的质量在规范中没有明确的量化评估准则和要求[4]。
其中:n为重复线公共段的数据点数,k为重复线的数目。
重复线内符合精度概念的提出为评价航空物探测量系统的精度性能和测量数据的质量高低提供了很好的指标依据。但是给出的计算公式却并不符合统计学的理论,对重复线内符合精度评价会偏高,并且在k=2时与计算总精度的公式不具有统一性。
重力、磁法勘探中对于观测一致性的计算,与工作的手段(地面、空中,还是海洋)无关。从统计学上讲,无论是利用重复线,还是利用测线与切割线交叉点,计算公式本身也应该具有统一性。笔者从数理统计理论出发得出新的计算公式及水平调整方法。并将其应用于航磁梯度测量中梯度测量的方向差改正。
1 计算公式的统一
总体方差和样本方差是数理统计中的两个概念,对于理解重力、磁法测量规范中各种统计计算公式能起到至关重要的作用。总体方差σ计算公式为:
其中:δj=xj-μ,μ为真值,但真值的大小无从知道,当k很大时,即测量次数为无限多次时,可以认为算数平均值等于真值μ,即:
但在实际测量工作中,测量采用次数是有限的,而这有限次的采样是作为总体的一个样本,样本方差S表示为:
其中:δj=xj-
以上是将xj看作单个测点的观测值时的均方差表达式,而如果xj为一个向量xij时,则可以看做是在一条线上进行重复测量的结果。那么每个测点观测值(指经过相应改正后的值,如磁ΔT检查观测中需经过日变改正)的样本方差计算方法为式(4),假定有重复观测的测线有n个测点,那么所有测点的均方差ε为:
其中:δij为第j条重复线公共段各点观测值xij与该点各重复观测的平均值
式(6)即为新的重复线内符合精度计算公式。可以发现如果利用式(1)计算那么结果会偏小,即会高估仪器的内符合总精度。
令总观测量的值为m,即m=n×k,令Vt(t=1,2,3,…,m)为某次观测值(包括参与计算平均值的所有数值)与该点各次观测值平均数之差,即:
则得到:
这是地面重、磁勘测中多台仪器开(收)工一致性总均方误差的计算公式,其方法是建立公共测点,每台仪器在这些测点上进行观测构成重复观测。同时也是检查(重复)观测时计算测量总精度的计算公式。但检查线测量工作中往往只对某一条测线进行一次重复观测,即只有原始观测和一次重复观测。此时k=2,因为有:
将式(10)和式(11)以及k=2代入式(6)得到:
需要注意的是式(12)中的δi为两次观测的差值,即δi=xi2-xi1。式(12)是地面重、磁勘探中利用重复观测计算测量总精度的公式,也是航空磁测中利用测线和切割线交叉点计算测量总精度的计算公式[4]。在航空重、磁测量中,其实际情况相当于利用测线与切割线交点处的测值虚拟出一条测线(或切割线)的重复线与原测线(或切割线)计算内符合精度。因此利用重复线与利用测线和切割线交叉点计算总精度二者本身是一致的,利用测线和切割线交叉点计算总精度是在观测次数为两次(k=2)时的一种特殊情况。
2 水平调整方法
对于观测的重复线,第j次观测的重复线内符合精度计算公式为:
式(13)和地面重、磁勘探中每一台仪器一致性均方差计算公式是一致的。文献[5]在计算了每条重复线的内符合精度后,指出参照所有重复线的平均场数据的水平均值,对每条重复线数据的水平均值进行相应的水平调整。排除受偏航、飞行高度的影响,所测场值完全由测量仪器自身的因素决定时,多次重复测量曲线的形态将近于“平行”,因此笔者提出直接利用每条重复线内符合精度值εj对其进行水平调整,即:
式(14)可以认为是不考虑飞行高度因素影响时的一种特殊情况。式中εj的正负号(±)的选择以水平调整后每条重复线的内符合精度值更小为标准,即调整后每次观测的磁场总体水平更接近多次观测的平均值的总体水平。将式(14)水平调整后的δij代入式(13)计算出均方差值称为每条重复线测试数据水平调整后内符合精度,代入式(6)计算的均方差值则称为所有重复线测试数据水平调整后内符合总精度。
3 应用
图1
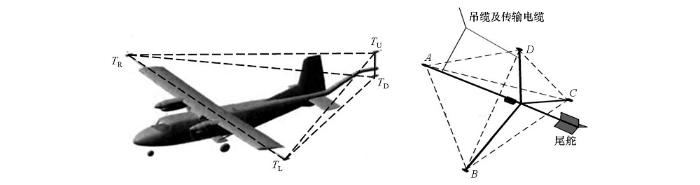
但几乎所有的高灵敏度光泵磁力仪都有一个很小的转向差。另外不同的探头由于出厂批次不同,它们之间也往往会存在一个很小的接近于常数的差值,这在ΔT测量中往往表现为不同测线之间的水平高低,ΔT测量可以采用滤波或人工方法进行调平。但利用这样的探头组成梯度系统测量结果将出现明显的正负条带,并且作为向量测量,在进行姿态改正[10]前就需要把这个差值去掉或降到最小,否则在进行姿态改正时转向差会作为某一个方向的梯度值分配到其他方向上去。处理梯度转向差在以往的航磁梯度测量中采用了不同的方法,例如在吊舱式垂直梯度测量系统中使用操纵装置根据测线方向改变探头的方向,使探头永远保持在一个方向上[20]。固定翼航磁梯度测量在处理干扰场造成的转向差时则将补偿系数由原来的18项改为19项,即增加一个常数项,并在计算补偿参数时使用带宽更大的滤波器[21]。
这里以中国冶金地质总局地球物理勘查院设计的直升机吊舱航磁梯度系统采集的数据进行计算。该系统集成了高精度磁力仪与双GPS/惯导测姿系统,能够完成磁总场及其3个轴向梯度的同时测量并完成姿态改正。直升机吊舱航磁梯度测量系统设计理论图及实物图如图2所示。该梯度系统在四面体4个角点各装一个探头测量磁场分别为T1、T2、T3、T4。其中1、2和3号探头构成等边三角形,P点为正三角形中心位置,在此装置下P点磁场值TP可以通过求1、2和3号探头平均值求得:
图2
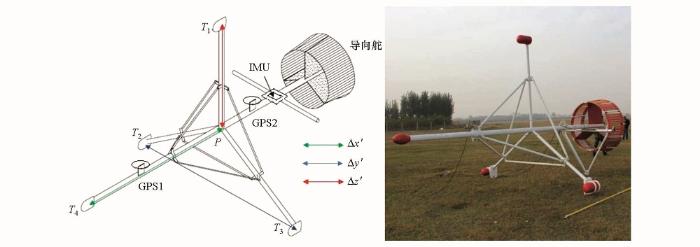
主杆前端装有4号探头。吊舱梯度系统测得的三轴梯度计算公式为:
其中: x'、y'、z'分别为纵向、横向、垂向;Δx'、Δy'、Δz'分别为纵向距、横向距、垂向距。
其中:
由于吊舱系统本身不需要磁补偿,为了消除梯度的转向差采用了在磁场均匀的高空(可以认为没有梯度异常)飞一个“三叶草”的方法。考虑测线与切割线的往返飞行,“三叶草”中的红色十字分别沿测线和切割线方向。梯度测量采用的多探头方法本身使得任一条测线都成为不同探头测量的同向重复线,中间的十字实际又构成梯度测量两条反向重复线。利用航迹为红色十字(图3)的数据就可以计算各个探头在4个方向上(0°,90°,180°和270°)的转向差,并评价梯度测量系统的精度。
图3
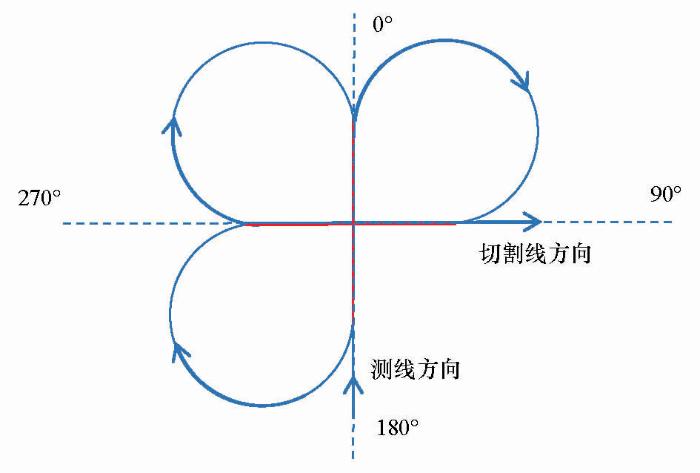
表1 水平调整前各探头内符合精度及总精度
| 1号探头/nT | 2号探头/nT | 3号探头/nT | 4号探头/nT | |
|---|---|---|---|---|
| 0° | -0.5285307687156141 | -0.5938423666072024 | 0.8312815518393176 | 0.2915311642938796 |
| 90° | -0.5197623966896682 | -0.4403397154612402 | 0.6405934027202965 | 0.3195007208107127 |
| 180° | -0.5899086526369078 | -0.3399342043794137 | 0.9924406460766684 | -0.0667719429119522 |
| 270° | -0.4991288138970681 | -0.5046416770417679 | 0.8685583314799767 | 0.1353263612624347 |
| 内符合精度 | 0.5361862509490541 | 0.4868373698971536 | 0.846155953833143 | 0.2321164915774039 |
| 总精度 | 0.656852161018662 | |||
表2 水平调整后各探头内符合精度及总精度
| 1号探头/nT | 2号探头/nT | 3号探头/nT | 4号探头/nT | |
|---|---|---|---|---|
| 0° | 0.015297704698418 | 0.0101696822821069 | 0.0158698308324947 | 0.018645771890485 |
| 90° | 0.0066471146271898 | 0.0139827153611879 | 0.0079991965992842 | 0.0114905530037505 |
| 180° | 0.0104115538219807 | 0.0271337880464745 | 0.0300916472247034 | 0.0213083517338155 |
| 270° | 0.0074237272896437 | 0.0147040325161841 | 0.0111155589450553 | 0.009196504666883 |
| 内符合精度/nT | 0.0109952508728542 | 0.0174781550540096 | 0.018523947143738 | 0.0163486573986367 |
| 总精度/nT | 0.0185902901391291 | |||
限于篇幅只对一个方向(270°)的三方向梯度进行展示,见图4。从图中可以明显的看出,调整前的梯度偏离零值,存在明显的转向差。调整后的梯度值都回到了零线上。
图4
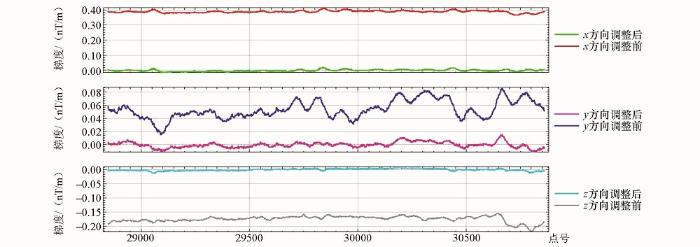
调整后的三方向梯度值可以认为完全是梯度系统的噪声(包括磁力仪和姿态仪的噪声),计算其均方差得到表3。作者认为这样计算的噪声水平要比利用在地面测量的静态数据计算的噪声更能反映梯度系统在测量过程中的动态水平,也比利用全区测量数据的四阶差分均方差计算的动态噪声更合理。
表3 梯度的噪声统计
| x方向梯度/(pT/m) | y方向梯度/(pT/m) | z方向梯度/(pT/m) | |
|---|---|---|---|
| 0° | 7.918254073475 | 5.269886898420 | 6.386599562450 |
| 90° | 5.618693071148 | 4.737651809021 | 2.750794712067 |
| 180° | 9.126889912194 | 14.280973532021 | 5.173281582975 |
| 270° | 5.897774739030 | 4.261252718721 | 3.964132836451 |
| 总噪声水平/(pT/m) | 7.400698472359 | 8.246677420401 | 4.935249534654 |
表4 梯度的噪声统计
| x方向梯度/(pT/m) | y方向梯度/(pT/m) | z方向梯度/(pT/m) | |
|---|---|---|---|
| 0° | 7.891094367541 | 5.353451252041 | 6.354018188118 |
| 90° | 5.485889672940 | 4.864836034794 | 2.795427426588 |
| 180° | 8.974530273678 | 14.203122283713 | 5.623773726930 |
| 270° | 6.088297048451 | 3.891321292421 | 4.057542818538 |
| 总噪声水平/(pT/m) | 7.358282103413 | 8.205021353050 | 5.065314631441 |
表5 水平调整前梯度各方向分量的内符合精度
| x方向梯度/(pT/m) | y方向梯度/(pT/m) | z方向梯度/(pT/m) | |
|---|---|---|---|
| 测线方向 | 47.2734597845345 | 559.6277155395362 | 59.6560139466257 |
| 切割线方向 | 493.8845107917437 | 118.7910771059847 | 8.1289605731606 |
| 总内符合精度/(pT/m) | 340.9212225720188 | 414.8794885264877 | 43.7203613891743 |
表6 水平调整后梯度各方向分量的内符合精度
| x方向梯度/(pT/m) | y方向梯度/(pT/m) | z方向梯度/(pT/m) | |
|---|---|---|---|
| 测线方向 | 5.9732738092272 | 10.9558203709261 | 4.2848570571257 |
| 切割线方向 | 5.1516987489565 | 4.7507894080879 | 2.8035691537752 |
| 总内符合精度/(pT/m) | 5.6008927859762 | 8.6058119895801 | 3.6619666847201 |
必须指出的是多探头组成的梯度系统由于各个探头随姿态变化其空间转向差变化也不同,探头两两之间的差值也造成了梯度系统的空间转向差,以上方法只是考虑在四个方向上的不同,并没有考虑梯度系统在全空间内的转向差。这类似最早的航磁干扰场补偿中补偿恒定场的方法。
4 结论
对于重、磁勘探规范中各种计算公式进行细致的解读,从本质上理解数理统计方法评价重、磁勘探中仪器的工作性能和整个测量工作的精度具有实际意义。笔者将航磁重复线内符合精度计算公式进行了改进,使其和地面重磁勘探中仪器一致性、质量检查精度计算及航空重磁测量中利用测线与切割线交叉点计算总精度具有形式上的统一。将其应用于梯度测量中消除梯度的转向差和评价航磁吊舱梯度测量系统的测量精度上,并对吊舱式航磁总场梯度测量系统的改进提出了具有建设性的建议。对于航磁梯度测量的研究正如火如荼,望批评指正。
参考文献
航空重力重复线测试数据质量评价方法研究
[J].<FONT face=Verdana>为了量化评估航空重力系统的性能指标,通常采用多次往返的重复线测量方式来测试航空重力仪动态测量的重复性和一致性,但现有规范中没有明确针对航空重力重复线测试数据质量的评估准则,本文研究总结了航空重力重复线测试数据均方差精度计算方法,依据重复线测试数据均方差内、外符合精度的计算结果,可以更为客观地评估仪器的动态测量精度指标和工作状态.</FONT>
航空重力测量内符合精度计算方法
[J].<p>为了评估航空重力系统的性能指标,通常采用对一条测试线多次往返飞行计算各条重复测试</p><p>线内符合精度的方法。笔者研究了一种较准确的计算各重复线对应点的方法,并在对应点处采用插</p><p>值方法计算其重力值,利用重复线上对应点的重力值进行均方差计算可以得到精度较高的内符合精</p><p>度值。</p>
航磁重复线测量数据质量评价方法研究
[J].
DOI:10.11720/wtyht.2014.4.17
URL
Magsci
[本文引用: 1]

为了量化评估航磁测量系统的动态性能指标,通常采用多次往返的重复线测量方式,来测试系统的工作稳定性和一致性,但现有规范中对重复线测量数据质量没有明确的量化标准,笔者对造成重复线磁场测量值偏差的原因进行了客观的分析,研究总结了航磁重复线测量数据均方差精度计算方法,并编写了相应的计算软件,依据重复线测量数据均方差内符合精度计算结果,客观地评估仪器的动态测量精度指标和工作状态。
航磁重复线内符合精度计算方法
[J].
DOI:10.11720/wtyht.2016.1.22
Magsci
[本文引用: 2]
<p>为了评价航磁测量数据的质量,通常采用重复线飞行,计算重复线测量值均方差内符合精度的评价方法,而计算内符合精度,最重要的是准确建立测线和重复线公共线段上的对应测点。笔者研究并采用了最小距离法,计算测线和重复线公共线段上测点对应关系,经过位置改正、磁场水平调整等处理,完成重复线上对应点测量值均方差的计算,获得准确的内符合精度计算结果。</p>
运五飞机上航磁梯度测量系统的安装与补偿
[J] .
DOI:10.3969/j.issn.1000-8918.2006.03.009
URL
Magsci
[本文引用: 2]
<p>介绍了在单阀双翼的运五飞机上安装既可进行垂直梯度测量,又可进行水平梯度测量(包括横向和纵向水平梯度测量)的航磁梯度测量系统的方法,初步探讨应用航空地球物理综合测量系统(AADCⅡ)自动航空磁力数字补偿仪的方法,并对补偿结果进行评价。多次实验结果证明了该补偿方法的效果良好。</p>
航磁梯度测量及其在砂岩型铀矿勘查中的应用初探
[J].
DOI:10.3969/j.issn.1000-0658.2009.06.006
URL
[本文引用: 1]
简单介绍了航磁梯度测量的方法原理、优点及数据处理技术,并将该方法应用于砂岩型铀矿勘查中,对浅层断裂的识别、铀成矿环境的识别及磁性层体埋藏深度反演等方面进行了初步探讨,认为航磁梯度测量可在砂岩型铀矿勘查中发挥重要作用.
AGS-863航磁全轴梯度勘查系统关键性指标测试
[J] .<p>中国国土资源航空物探遥感中心成功研制出具有完全自主知识产权的AGS-863航磁全轴梯度勘查系统,并在内蒙古某地进行了航磁全轴梯度试生产。为配合航磁全轴梯度试生产,对系统设计的关键性指标予以实际测试,设计了相关试验,以验证AGS-863航磁全轴梯度勘查系统的稳定性与可靠性。测试结果表明系统具有非常好的同步特性、一致性和长期稳定性以及补偿精度。</p>
航空三维磁梯度测量方案研究
[J] .本文概略介绍了航空三维磁梯度 测量的发展现状,指出了实施航空三维磁梯度测量所应着力解决的几个问题,包括基本装置及其计算方法、探头一致性、探头姿态以及固定翼磁补偿问题等,并针对 当前状况提出了用于大比例尺或中-大比例尺航空三维磁梯度测量的具体方案,大胆引入了正四面体测量装置,并将陀螺仪数据同步至原航测数据之中,既可大幅度 提高测量精度及数据稳定性,同时可解决同点三梯度的数值计算问题,对后续数据处理、成图、解释均具有重要意义。
航磁全轴梯度数据地质解释优势研究
[J].
DOI:10.6038/pg20130551
URL
Magsci
[本文引用: 1]
中国国土资源航空物探遥感中心成功研制出具有完全自主知识产权的航磁全轴梯度勘查系统,在中国的北部某地区进行了航磁全轴梯度测量飞行,获得了横向梯度、纵向梯度和垂向梯度数据.本文简要介绍了测区地质概况、飞行方案及数据处理等,重点对梯度数据在断裂构造划分等方面进行了探讨,认为航磁梯度数据比总场数据更加清晰显示构造走向,并比较了实测和转换的垂向梯度数据,结果表明实测垂向梯度在反映地质体边界等方面具有一定优势.
航磁梯度数据在磁性地质体边界判断方面的研究
[J].
DOI:10.13278/j.cnki.jjuese.201501301
URL
[本文引用: 1]
完全国产化的航磁全轴梯度勘查系统已开展了测量工作,并获得了比较理想的梯度数据,但是如何利用梯度数据进行磁性地质体边界圈定还处于研究阶段。笔者先给出了航磁全轴梯度测量原理;然后着重从利用梯度数据尤其是垂向梯度数据进行岩体边界圈定等方面进行了讨论研究,认为航磁梯度数据相比于总场数据在地质体边界判断方面可提供更加丰富的地球物理信息;接着提出了梯度数据需要在判断磁性地质体边界上进行化极处理,并根据垂向梯度数据零值线确定地质体边界的原则,圈定磁性地质体的边界位置。与实际地质情况的对比表明,利用梯度数据圈定磁性地质体边界的应用效果比利用总场数据的效果明显。
航磁梯度数据与地质异常反映之间的关系
[J].
DOI:10.6038/pg20140421
URL
Magsci
[本文引用: 1]
<p>在异常选编工作中,往往需要剔除掉区域背景场的干扰,从而寻找浅部异常的一些信息,因为区域背景场往往是由一些火山岩、侵入岩所引起,当然也不排除大型矿床所引起的可能性,航磁总场是区域场和局部场的叠加,因此异常往往会因为某种方式被忽略掉.梯度数据具有压制深部异常体、突出浅部异常体信息的特点,这就为梯度数据能够方便地提取异常提供了理论支持.在中国的北部某地区进行了航磁全轴梯度测量飞行,获得了横向梯度、纵向梯度和垂向梯度数据,利用实测数据总结出梯度数据与地质体异常之间的关系,确定了异常选编原则,为今后梯度数据确定异常奠定了基础,同时分析了实测的垂向梯度数据相比于转换的垂向梯度数据在异常反映上信息更丰富.</p>
国产航磁全轴梯度勘查系统试验测量
[J].
DOI:10.11720/wtyht.2016.2.22
Magsci
[本文引用: 1]
<p>2009年7月,"全数字化矢量航磁勘查系统研发"课题组在哈尔滨平房机场对航磁全轴梯度勘查系统样机实施系统试验测试及试验测量,先后进行了飞机改装、系统集成测试、补偿飞行及约5000km的试验测量飞行,取得了良好的效果,表明该系统样机性能稳定可靠,初步达到实用化程度,实验工作为今后系统的改进与完善提供了依据。</p>
The GeomagneticGradiometer
[J] .DOI:10.1190/1.1439897 URL [本文引用: 1]
Important design considerations for in board airborne magnetic gradiometers
[J].
DOI:10.1190/1.1441611
URL
[本文引用: 1]
The advantages of magnetic gradiometry as an adjunct to total field mapping are generally recognized and a few aircraft have been equipped with gradiometers. These gradiometers are derived from high-sensitivity total-field magnetometer systems that are in themselves subject to certain errors that can usually be tolerated in conventional surveys. However, in a gradiometer, where very large total-field values are differenced, these errors can, in many cases, greatly exceed the basic accuracy required of the system. There are two principal sources of error in inboard gradiometry systems. The first, and most significant, results from the inevitable magnetic interference of the aircraft or from the inability of currently available compensation systems to deal with the magnetic interference adequately. Passive methods of compensation are not sufficiently comprehensive for gradiometry and the active compensation systems currently in use, which were designed for military applications, cannot guarantee compensation at zero frequency (dc) or at the very low frequencies of interest to the geophysicist concerned with long-wavelength anomalies. The second source of error is the frequency-counting technique usually employed to convert a Larmor frequency to ambient total field. The counting process is somewhat analogous to digital sampling at a relatively low rate and as such affords little protection against aliasing from higher frequency interference sources, including components at aircraft maneuvering frequencies. This paper, using examples, illustrates the two types of error. A list of design criteria is presented and several techniques are described for realizing these criteria. Finally, compensation and survey line results are shown for a three-axis gradiometer system in the National Research Council of Canada's Convair 580. This aircraft uses nonoriented cesium magnetometers, one in each wingtip and one at the tip of the tail fin. Compensations over the entire normal maneuver envelope of the aircraft on all headings give typical standard deviation errors of 3 mg/m from dc to 1 Hz. Thus, the system is capable of measuring gradients down to nongeologic background levels.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}