


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
地下水污染调查中探地雷达有限差分数值模拟
引用本文
王书, 闫天龙. 地下水污染调查中探地雷达有限差分数值模拟[J]. 物探与化探, 2016,40(5): 1051-1054.
WANG Shu, YAN Tian-Long. GPR numerical modeling with finite-difference method in investigating groundwater pollution[J]. Geophysical and Geochemical Exploration, 2016,40(5): 1051-1054.
Doi:10.11720/wtyht.2016.5.34
Permissions
WANG Shu, YAN Tian-Long. GPR numerical modeling with finite-difference method in investigating groundwater pollution[J]. Geophysical and Geochemical Exploration, 2016,40(5): 1051-1054.
Doi:10.11720/wtyht.2016.5.34
Copyright©2016, 物探与化探编辑部
© 《物探与化探》编辑部
地下水污染调查中探地雷达有限差分数值模拟
作者简介: 王书(1990-),男,博士研究生,主要从事地球物理电(磁)法的研究工作。
摘要
基于探地雷达正演模拟软件GprMax,针对地下水不同污染途径和不同污染介质,建立了地下水污染的5种模型,采用有限差分法进行了数值模拟计算。模拟结果表明探地雷达在探测地下水污染中有较好的应用效果。
关键词:
地下水污染; 探地雷达; 有限差分; 数值模拟
中图分类号:P631
文献标志码:A
文章编号:1000-8918(2016)05-1051-04
doi: 10.11720/wtyht.2016.5.34
GPR numerical modeling with finite-difference method in investigating groundwater pollution
Abstract
In this study, the authors built five kinds of pollution models and carried out numerical simulation with the finite-difference method to tackle different ways and different media of groundwater pollution, based on GPR forward modeling software (GPRMax). The simulation results show that GPR exhibits fairly good application effects in detecting groundwater pollution.
Keyword:
groundwater pollution; ground penetrating radar(GPR); finite-difference method; numerical modeling
地下水资源是人类赖以生存的物质基础, 是国民经济发展的命脉。从全球来看, 我国地下水资源不足, 是一个严重缺水的国家。近年来, 随着我国经济社会的快速发展, 城市急剧扩张, 地下水资源的开发利用速度加快, 城市大幅度增加, 部分污染进入地下水体, 造成地下水污染。地下水污染的趋势是从点状、条带状向面上扩散, 由浅层向深层渗透, 由城市向周边蔓延[1, 2], 污染途径主要包括:地下储存罐通过大气降水或灌溉水的淋滤固体废物及包气带中的污染组分周期性地进入含水层的间歇入渗型、污染物随水不断渗入而进入含水层的连续入渗型、污染物通过越流从一个含水层进入另一个含水层的越流型、污染物通过各种途径以地下径流的形式进入含水层的径流型。为了利用探地雷达方法调查地下水污染源、污染途径及污染范围, 应用探地雷达正演模拟软件(GprMax), 对地下水污染模型进行了有限差分数值模拟, 研究不同污染源及不同污染途径的探地雷达异常特征, 为应用探地雷达调查地下水污染提供参考[3, 4, 5]。
1 方法原理
探地雷达(GPR)是利用高频电磁波的反射原理来探测目标体。电磁波在地下传播时, 其路径、强度、波形随波经过的地下介质的电性和几何形态变化而变化, GPR通过发射天线发射高频脉冲(1 MHz~1 GHz)电磁波, 接收天线接收来自地下介质的反射波, 根据波的旅行时间、幅度、波形特征来推断地下介质的结构分布。由于它具有轻便、快速、无损、直观的特点, 被广泛应用于环境、工程及地下水的监测、检测之中[6]。
2 模型建立
根据探地雷达的工作原理, 针对地下水污染途径的类型, 依据污染液的不同深度、不同导电率(σ )和介电常数(ε ), 在层状模型的基础上建立了不同的污染模型(表1), 包括低介电常数、低导电率(简称低介低导)浅部污染模型, 高介电常数、高导电率(简称高介高导)浅部污染模型, 以及低介低导和高介高导的深部污染模型。高介高导模型模拟的主要是由海水、含盐较高的废水、生活垃圾淋漓液等造成的地下水污染, 低介低导模型模拟的主要是由油类液、废油漆及废涂料液等造成的地下水污染[7, 8]。
| 表1 地下水污染调查模型参数一览 |
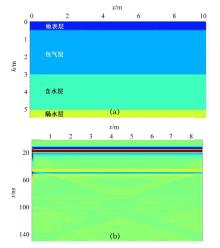
层状模型由4层组成, 从上到下依次是地表层、包气层、含水层和致密的隔水层(参数见表1)。由于土壤中污染液在地下的存在形式主要是自由相、溶解相(或挥发相), 因此, 污染模型是在层状模型的基础上增加了污染液的自由相和挥发相, 污染区域宽3 m, 厚度1.5 m, 污染区底界面深度分别取2、3、4、5 m; 当污染液未进入含水层时可作为浅部污染模型, 污染液进入含水层时即为深部污染模型。
3 数值模拟
数值模拟采用英国爱丁堡大学Antonis Giannopoulos 博士基于时域有限差分方法开发的探地雷达正演模拟软件(GPRMax)。该软件用于模拟电磁波在各向同性均匀媒质和Debye型色散媒质中的传播, 可得到地下目标体的探地雷达图像。GprMax可用于探地雷达二维正演模拟(GPRMax2D)和三维探地雷达正演模拟(GPRMax3D)。应用GPRMax2D正演模拟软件, 对几种模型进行了正演模拟, 获得了探地雷达剖面异常特征和异常规律。
由图1可见, 对地下水未污染的层状模型, 探地雷达剖面上表现为层状异常, 同相轴连续, 50 ns的同相轴反映了模型中包气层与含水层的界面。
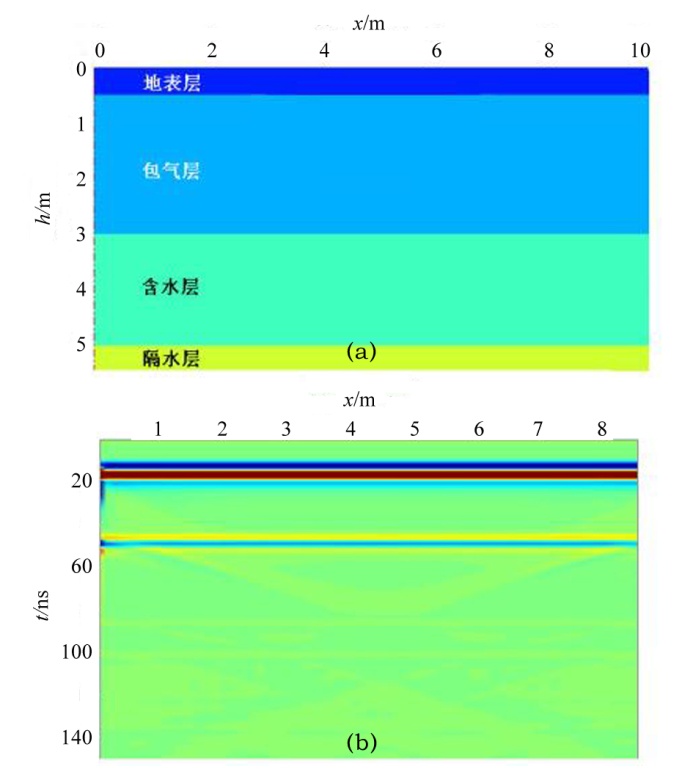 | 图1 未污染模型(a)及其探地雷达剖面(b) |
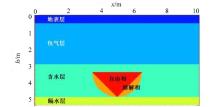
图2模拟了污染模型1的污染羽形成的浅部污染。在图2b中, 探地雷达剖面表现为同相轴不连续, 包气层中异常出现拱形曲线, 在包气层与含水层界面处也出现向上的拱形曲线; 图2c中, 高介高导模型的探地雷达剖面异常出现向下凹陷的同相轴曲线, 在模型顶端和包气层和含水层界面反映明显。
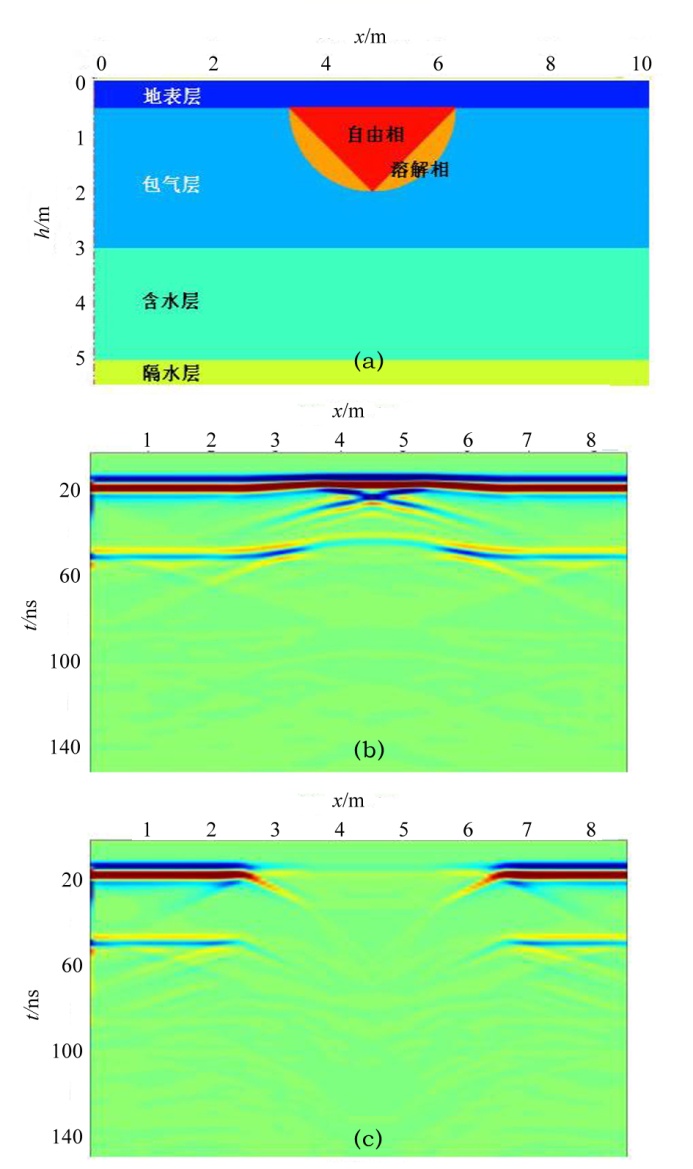 | 图2 浅部污染模型1及其探地雷达剖面 a— 污染模型; b— 低介低导剖面; c— 高介高导剖面 |
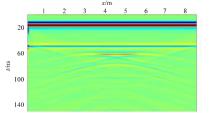
图3a为层状介质中污染源自由相和溶解相进入地下到达含水层上界面时的模型(模型2)。若污染为低介低导污染, 探地雷达剖面图上(图3b)同相轴拱形宽度较大, 污染源上界面同相轴明显; 若污染为高介高导模型, 探地雷达剖面图上(图3c)同相轴较宽面平缓, 污染源上界面清晰。
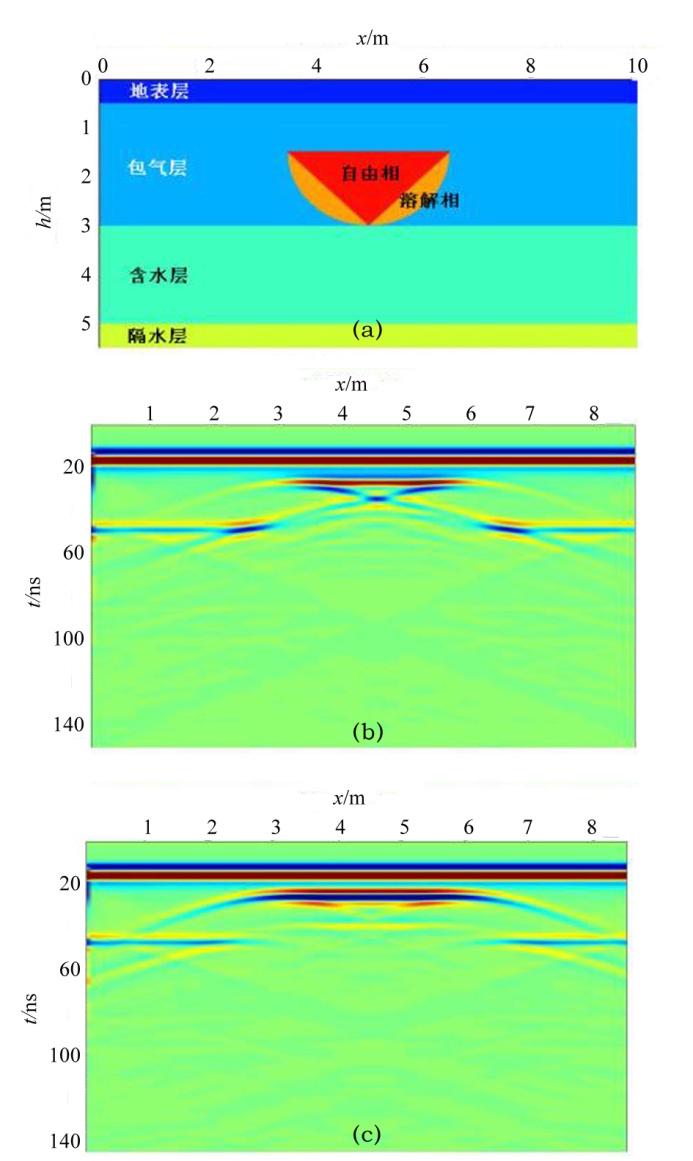 | 图3 浅部污染模型2及其探地雷达剖面 a— 污染模型; b— 低介低导剖面; c— 高介高导剖面 |
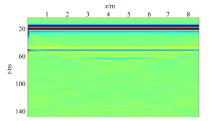
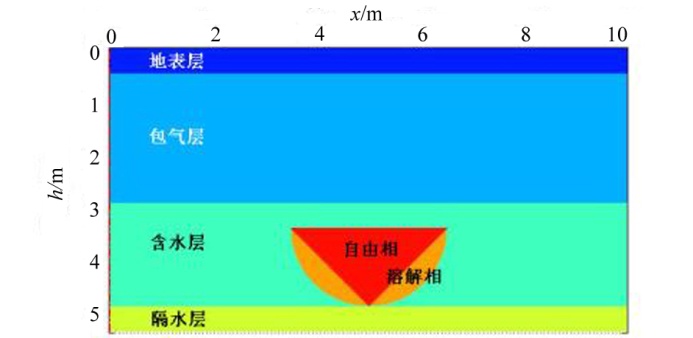
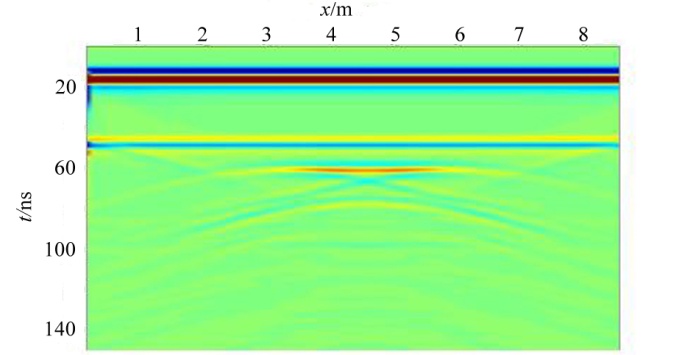
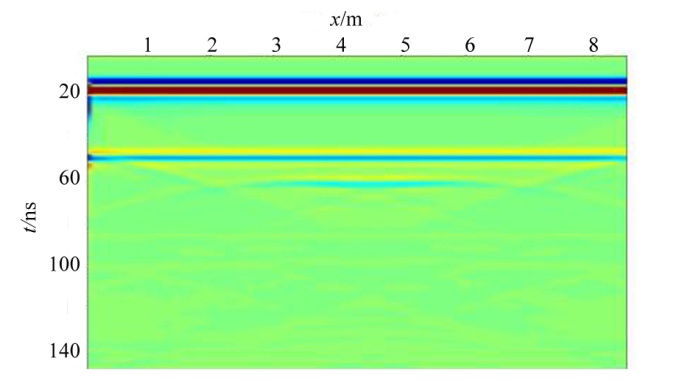
模型3为层状介质中污染源自由相和溶解相渗入地下位于包气层和含水层界面(图4a), 若污染为低介低导污染, 探地雷达剖面图上(图4b)异常在污染区上零乱, 同相轴在包气层和含水层界面处缺失, 污染源的顶界面的同相轴清晰, 污染源底界面同相轴出现拱形双曲线; 若污染为高介高导污染, 探地雷达图上(图4c)包气层和含水层界面的同相轴出现缺失, 污染源上界面同相轴宽而清晰, 污染源下界面处同相轴反映不明显。
 | 图4 深部污染模型3及其探地雷达剖面 a— 污染模型; b— 低介低导剖面; c— 高介高导剖面 |
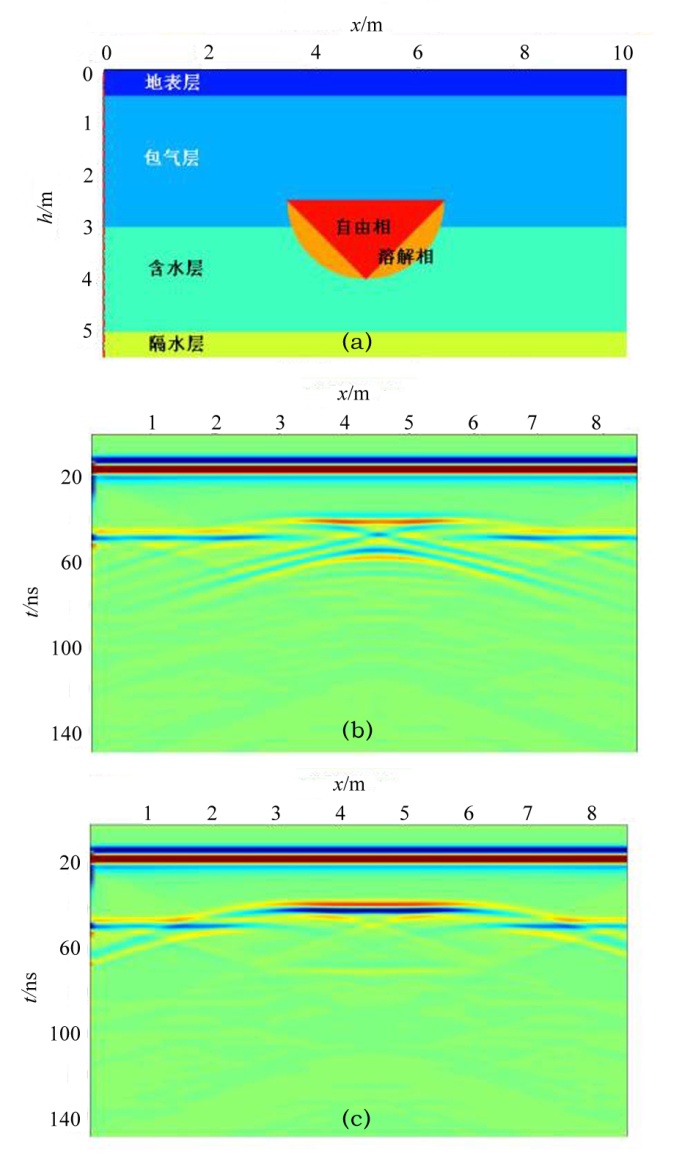
图5为模型4, 即地下层状介质中污染源自由相和溶解相进入地下含水层的底界面, 当污染为低介低导污染源, 探地雷达剖面图上(图6)同相轴在包气层和含水层界面处连续, 同相轴有污染源顶界面处出现平缓, 同相轴在污染源底界面处出现拱形双曲线; 当污染为高介高导污染源, 探地雷达图上(图7)包气层和含水层界面的同相轴连续, 污染源上界面同相轴显示不明显, 污染源下界面处同相轴没有反映。
 | 图5 深部污染模型4 |
 | 图6 深部污染模型4低介低导探地雷达剖面 |
 | 图7 深部污染模型4高介高导探地雷达剖面 |
4 结论
通过对地下水污染的不同模型的模拟可以看出, 不同深度、不同污染物在探地雷达剖面上的同相轴变化亦不同, 归纳如下:
1)在探地雷达剖面图上, 同相轴反映包气层和含水层的界面比较清晰, 说明探地雷达可划分地下水的含水层界面。
2)从浅部污染模拟中可以看出, 污染顶界面同相轴异常明显, 而底界面异常模糊, 这表明探地雷达可探测地下水污染的上界面。要探测污染源的下界面, 低介低导的污染源优于高介高导的污染源。
3)深部污染模拟的探地雷达剖面图上, 低介低导污染模型的上界面反映都清晰、低介低导污染模型的下界面反映明显、而高介高导污染模型的下界面模糊不清, 因此可以说探地雷达探测低介低导的污染源的上下界面和高介高导的污染源的上界面。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|