

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
飞机磁补偿质量评价及补后检查验证方法
引用本文
孙海仁. 飞机磁补偿质量评价及补后检查验证方法[J]. 物探与化探, 2016,40(5): 1040-1045.
SUN Hai-Ren. Investigation of compensation effect evaluation and heading flight check on high accuracy aeromagnetic survey[J]. Geophysical and Geochemical Exploration, 2016,40(5): 1040-1045.
Doi:10.11720/wtyht.2016.5.32
Permissions
SUN Hai-Ren. Investigation of compensation effect evaluation and heading flight check on high accuracy aeromagnetic survey[J]. Geophysical and Geochemical Exploration, 2016,40(5): 1040-1045.
Doi:10.11720/wtyht.2016.5.32
Copyright©2016, 物探与化探编辑部
© 《物探与化探》编辑部
飞机磁补偿质量评价及补后检查验证方法
作者简介: 孙海仁(1983-),男,工程师,主要从事航空物探测量技术方法研究等工作。
摘要
对于高精度航空磁测来说,飞机磁干扰必须有效的消除,其方法是补偿飞行。补偿效果的好坏直接影响到物探飞行数据的质量,由于国内目前使用的磁力补偿仪型号比较多,如何统一评价磁补偿质量就非常重要了。在航磁规范里,对航磁软补偿质量给出了具体的指标要求,但没有明确航磁软补偿质量的评价方法。笔者引入改善率和磁通门三分量等参数作为质量评价参考指标,及补偿后的航向飞行检查,以近一步验证补偿效果。
关键词:
磁补偿; 质量评价; 补后检查; 八方向
中图分类号:P631
文献标志码:A
文章编号:1000-8918(2016)05-1040-06
doi: 10.11720/wtyht.2016.5.32
Investigation of compensation effect evaluation and heading flight check on high accuracy aeromagnetic survey
Abstract
In high accuracy aeromagnetic survey, the magnetic interference of aircraft must be effectively eliminated, and the method is compensation flight. The compensation has a direct influence on the flight data quality of geophysical exploration; nevertheless, because China's magnetometers have different models, so how to perform unified evaluation is very important. According to the specification, the criterion of aeromagnetic survey ( DZ/T 1402-2010) provides specific measures for assessing the performance of digital magnetic compensation; nevertheless,it does not define the method of quality assessment. This paper introduces the parameter of IR and three components as well as different directions of flight so as to verify the effect of compensation.
Keyword:
magnetic compensation; evaluation; heading flight check; eight direction
在航空磁力测量过程中, 由于飞机飞行方向和运动姿态的变化、机上磁性元件产生的磁干扰场以及发动机运转产生的涡流场等, 都会对测量结果产生干扰。因此必须在测量开始之前, 采用不同的方法补偿飞机的这种磁干扰, 以达到准确测量地磁场的目的, 这种方法叫飞机磁补偿, 简称磁补偿。为了消除磁干扰, 在航空磁测中通常除了需要安装测量地磁场的高精度光泵磁力仪探头外, 还必须安装一个三分量饱和式磁通门磁力仪, 其目的是采集飞机在规定的方向上做特定动作时所引起的磁场变化数据[1]。这样就可根据补偿飞行中的磁总场、三分量饱和式磁力仪数据, 计算得出飞机磁干扰场的数学模型的各项干扰场系数, 从而根据这些系数来消除飞机的磁干扰。补偿方法分为硬补偿和软补偿, 软补偿方法与硬补偿方法相比有一明显优点, 即速度快。目前, 软补偿技术日趋成熟, 逐渐成为磁力测量补偿方法的主流[2]。笔者主要针对软补偿, 重点论述了衡量软补偿质量的一些参数及补偿后航向飞行检查时水平梯度和垂直梯度的修正方法。
1 磁补偿原理简述
光泵磁力仪探头所测得的磁场数据为地磁场和飞机干扰场之和[3]。用He来表示地磁场, 由于磁总场为矢量, 可以用T表示光泵磁力仪探头位置的磁总场H横向分量, 即x分量; 用L表示探头处的磁场H的纵向分量, 即y分量; 用V表示探头处磁总场H的垂直分量及z分量[3], 其表达式为:
3个方向的余弦表达式为:
用HTOT表示飞机干扰场:
其中:HPERM为飞机的恒定干扰场, 是指飞机上的永久磁性体对磁场的影响, 其作用在光泵磁力仪探头位置处的表达式为[3]:
HIND为感应场, 是指飞机上的软磁物质在地磁场的作用下, 产生的感应干扰场, 其作用在光泵磁力仪探头处的表达式为[3]:
HEDDY为涡流场, 是由飞机上的导电部件(主要为机皮)在地磁场作用下产生的涡电流引起的干扰场, 这些电流与飞机飞行时地磁场穿过飞机导电部件的磁通量的单位时间内的变化率成正比, 其表达式为[3]:
这样就可以根据补偿飞行时测得的飞机在侧滚、摇摆和俯仰飞行3种状态下的磁场值, 以及侧滚角Ω 、侧滚角Ψ 、俯仰角λ 、地磁倾角Φ 和航向角θ 的取值, 将cosx、cosy和cosz的数学表达式换算、整理和简化, 并最终得出飞机磁干扰场的系数[1]。
2 磁补偿方法
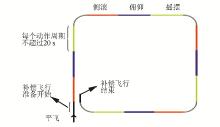
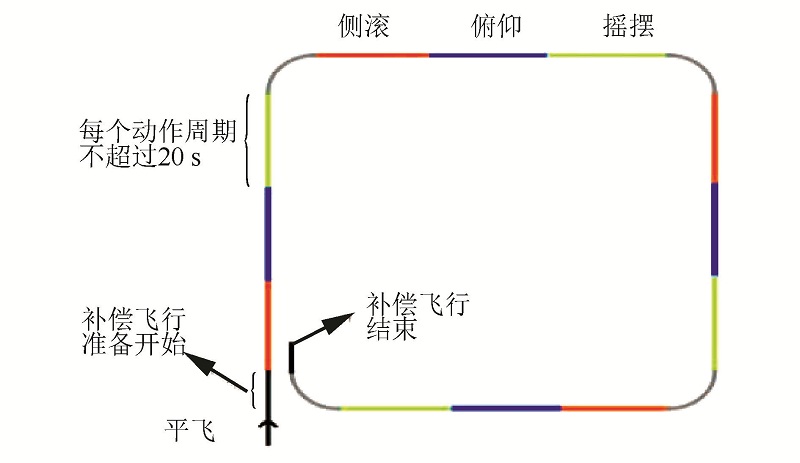
文中航空磁测载体为国产Y-12固定翼飞机, 仪器为航磁自动数字补偿仪(如AADC-Ⅱ )。在选定的平静磁场区(磁场变化最大不超过200 nT), 沿矩形闭合框4边(方向分别为0° 、90° 、180° 、270° 或测线和切割线方向), 高度2 000~3 000 m(视空域情况而定)大约飞行120 s, 每一方向分别做侧滚(± 10° )、俯仰(± 5° ), 侧滑(± 5° )3组动作, 每组动作约30 s, 以便获取飞机磁干扰场与飞行姿态之间的关系数据(图1)[4]。解算磁补偿模型的各项系数, 用于实时或事后进行磁补偿[8]。
3 磁补偿质量评价
软补偿的几个重要参数指标分别为CBIAS(表示补偿的斜率)、MEAN(表示未补偿的总场算术平均值)、STDUM(是未补偿的经过高通滤波后的总场标准偏差)、STDCM(为补偿后经过高通滤波后的总场标准偏差)、IR值(为补偿前后标准偏差的比值即改善率), 和NORM值(反映补偿困难程度的矢量标准以及显示总场的其他干扰项值)。
3.1 补偿后的标准偏差
规范里对于软补偿的要求就是补偿后的标准偏差小于0.08 nT。[4]所以对于软补偿来说, 补偿后标准偏差是个非常重要的衡量参数。
补后标准差是在4个特定方向上(0° 、90° 、180° 、270° )做侧滚、俯仰、侧滑动作和转弯期间补偿后剩余的标准差(均方差)。它反映的是补偿后磁干扰场HTOT数据的离散程度, 是一个绝对精度指标, 它的数值大小直接关系到磁补偿之后的数据测量精度, 反映到记录曲线上就是抖动度或噪声包络的大小, 是衡量补偿效果的主要指标[2]。
3.2 品质因素
此外, 也有用品质因数FOM(figure of merit)来评价补偿结果, 即通过4个航向上进行摇摆、仰俯、偏航所求得12个峰值的总和[1]。
品质因素(用Q值表示)最初应用在军事上, 是指飞机沿着北向、东向、南向、西向飞行, 每一方向分别做侧滚20° , 俯仰10° , 侧滑10° 3组动作时, 12组磁干扰场幅度(峰峰值)的总和, 这种评价方法需要提前记录下或计算出每种动作的开始和结束的时间, 并将与动作时间相对应的补偿后磁干扰场数据的峰峰值(最大值与最小值之差)计算FOM, 我们将其称之为品质因数[1]。
具体方法是:根据飞行日志提前记录时间或根据三分量磁通门数据得出每个动作时间段, 在每个时间段上计算出补偿前后磁干扰场峰的峰值。因为每条边都有侧滚、俯仰、偏航3种动作, 所以FOM值就等于这12个峰峰值之和, 当FOM值小于2 nT时, 补偿结果认为是合格[1]。
品质因素的定义比较模糊, 没有给出磁干扰场分离的方法, 对幅度量算方法也不明确。此外, 采用手动形式计算FOM非常困难, 即使采用自动形式, 也需定义每组动作的开始和结束位置, 这在实时飞行测量过程中是非常不方便的, 也不可避免地产生错误, 并且FOM只考虑了侧滚、俯仰和侧滑动作引起的磁干扰, 忽略了补偿飞行中的其他动作[2]。
3.3 改善率和NORM值
改善率(即IR值)是在4个特定方向上做侧滚、俯仰和侧滑动作和转弯期间未经补偿的剩余标准差(均方差)与补偿后剩余的标准差(均方差)之比。它是一个相对指标(通常在10~25之间为好), 其数值大小反映了补偿系统的能力, 对同一干扰源, 改善率最能说明问题。它有助于比较同一架飞机、不同校准飞行哪一次补偿得更好。
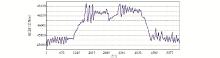
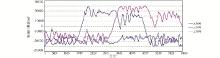
而NORM值能指示所出现的问题, 例如:矢量磁力仪探头或者电缆有故障等。下面以实际飞行中的两次磁补偿, 来比较判别IR值和NORM值在补偿中的作用(图2、3、4、5)。
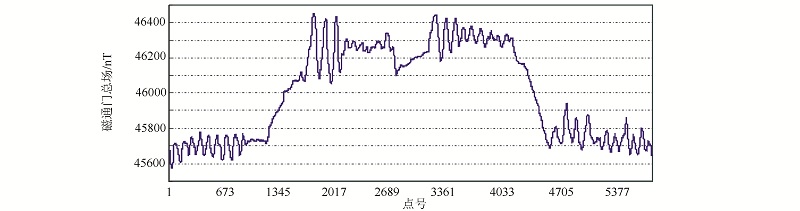 | 图2 第一次磁补偿磁通门总场数据曲线 |
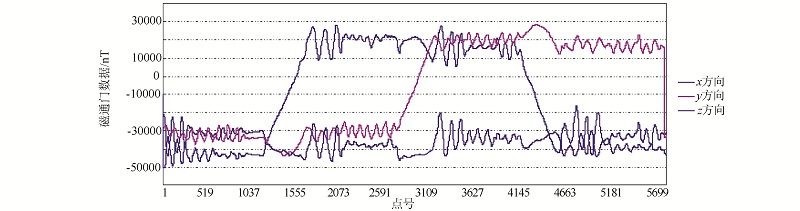 | 图3 第一次磁补偿三分量磁通门各方向数据曲线 |
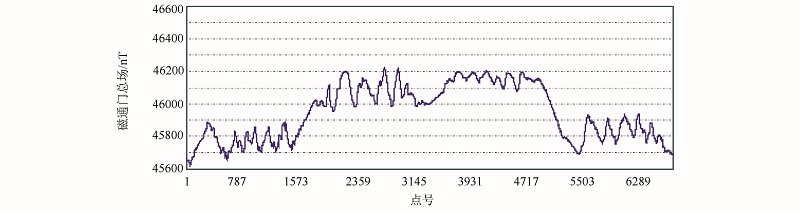 | 图4 第二次磁补偿磁通门总场数据曲线 |
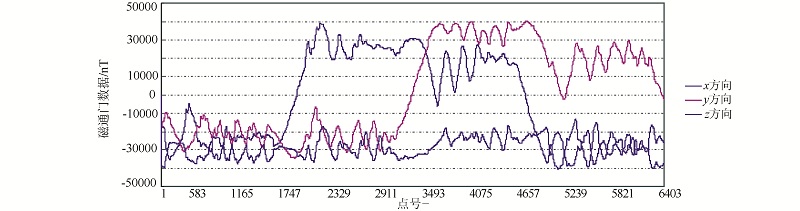 | 图5 第二次磁补偿三分量磁通门各方向数据曲线 |
从图2和图4比较可以得出, 第一次补偿磁通门总场的变化要大于第二次补偿的磁通门总场的变化, 但是, 从图3和图5又可以看出第一次补偿磁通门三分量变化却总体小于第二次补偿磁通门三分量的变化。再比较两次补偿的参数(表1), 可以看出, 第二次磁补偿的IR和NORM明显要好于第一次磁补偿。通过比较发现, 虽然两次磁补偿补偿后的标准偏差都小于规范要求的0.08 nT的要求, 但是由于第一次补偿的动作姿态不到位, 补偿效果其实并不理想, 所以引入IR和NORM值来衡量补偿质量也是比较有实际意义的, IR值其实间接反映了补偿时飞机姿态动作的大小, 而NORM值反映的是补偿的困难程度, 这样能更全面的衡量磁补的质量。除此, 磁通门的数据也是一个重要的衡量指标, 三方向磁通门数据能够间接反映磁补时飞机动作的大小, 结合地磁场数据, 通过一定的测算甚至可以求出飞机的姿态角度, 对于磁补偿质量评价也是非常有效的。
| 表1 两次磁补偿主要参数对比 |
3.4 磁补偿检查飞行
以AADCⅡ 磁补偿系统为例, 当磁力仪在完成空中自动补偿取得合格补偿参数后, 为了检查磁补效果, 通常采用空中八方向或四方向飞行检查。检查探头(有时两个以上)在确定中心点位置上, 8个方向过中心点时的磁场数值, 以确定其最大方向差(偏向差)。当所取得的最大方向差小于规范(或仪器标称)给出的最大方向差时, 认为磁补是合格的、有效的[10]。当取得的方向差与规范(或仪器标称)要求的允许最大方向差较大时, 就要查找一下原因。若是仪器不稳定或磁补时严重飞行错误引起的就要重飞; 若是航向飞行检查时的轻微偏航和过中心点时各方向高度不一致引起的可不必重飞, 只需对所测磁场值进行水平和垂直梯度的校正。下面就如何进行水平和垂直梯度的校正做详细的阐述。
3.4.1 梯度公式和地磁要素的确立
1)正常场磁场值的获得
正常场磁场值可由中心点的经纬度代入地磁场的球谐表式计算出该点的地磁正常场(IGRF)和其3个分量x、y、z。在磁补过程(飞正四边形)和航向检查飞行中, 要求区内磁场平静, 磁场变化不大, 飞行高度在离地高度2 000~3 000 m内(在高海拔地区飞行时, 可根据使用飞机的最高升限考虑离地飞行高度, 但最低不得低于离地高度1 000 m之下)。在这样的区域内, 这样的高度上获得的磁场值, 可以近似认为是排除了地面干扰的地磁正常场, 在小范围内其磁场值具有均匀的(南北)水平梯度变化和垂直梯度变化[11]。笔者所使用的地磁正常场是在实际航向(八方向)飞行检查中获得的。
2)水平方向上的梯度公式和垂直方向上的梯度公式
为了使问题简化, 以地轴与磁轴重合为例来讨论。由地磁学理论公式推导得[9]垂直方向上的梯度公式[1]:
水平方向上的梯度公式:
其中:R为地球半径6 370 km, μ 0为磁导率, M为地球的磁矩, θ 为垂直分量Z与地轴N的夹角, Z、H是该点磁场值的垂直分量和水平分量。
从式(1)和式(2)可知:如果已知某点的垂直分量和水平分量就可已知道该点沿垂直方向处的垂直分量和水平分量及沿水平(南北)方向处的垂直分量和水平分量, 也就知道了沿该点垂直方向的梯度变化和沿水平方向的梯度变化[9]。
3)地磁倾角
由于条件所限, 我们无法通过普通设备直接获取磁补位置的地磁倾角, 而是通过公式来计算[9]:
其中:ϕ 是地理纬度, I是地磁倾角。
通过以上阐述可知, 使用梯度公式并满足相关地磁要素就可对航向飞行检查值进行水平和垂直梯度的校正。
3.4.2 水平梯度和垂直梯度的校正
以某次磁补八方向检查为例, 做各方向过中心点时磁场值的水平梯度和垂直梯度的校正。
首先为方便计算列出相关物理量之关系[7]。
其中:Bt为磁场总值, H是水平分量, Z是垂直分量。
其次给出了经日变修正后的这天的磁场值和图表以供计算和参考对比。
以TFCM1 180° 方向在中心点的磁场值为基值, 做该点的垂直分量和水平分量。中心点的纬度是38° 48.343333'N约为38.806° , 代入公式tanI=2tanϕ 得:
则I=58.129° , 那么中心点的地磁倾角是58.129° 。
把1#探头180° 方向过中心点的值Bt=54926.888和I=58.129° 代入公式H=BtcosI和Z=BtsinI, 计算得到H=29001.867 nT, Z=46646.058 nT, 把它们代入式(1)垂直方向上的梯度公式:
把它们代入式(2)水平方向上的梯度公式:
则沿该点垂直方向的垂直分量和水平分量为:
那垂直方向上的Btz为:
则该点的垂直梯度:
同理可得沿该点水平方向Km的垂直分量和水平分量为
以及水平方向的Bth:
则该点的水平梯度:
从而得出表2中TFCM1 180° 方向该点的垂直方向梯度变化是0.0259 nT/m, 水平方向的梯度变化是0.0 058 nT/m。用它来对其他方向的磁场值做水平方向(南北)和垂向高度的校正(同时对TFCM2进行校正), 得到经日变和高度、水平(南北方向)校正的磁场值表4。
| 表2 经日变修正后的八方向TFCM1、TFCM2磁场值 |
| 表3 日变修正后的最大方向差 |
| 表4 经日变、高度和水平校正后的八方向TFCM1、TFCM2磁场值 |
| 表5 经日变修正和经日变、水平、高度全校正的最大方向差 |
通过航向(八方向或四方向)飞行检查中, 对各方向磁场值进行水平梯度和垂直梯度的校正, 验证了磁补参数(实时补偿或事后补偿)的正确和补偿结果的正确。八方向或四方向飞行检查中对各方向在中心点磁场值进行水平、垂直梯度的校正方法, 它对检验航磁的自动补偿精度和校正其他方式的补偿结果具有较强的借鉴意义。
4 结论
磁补偿飞行对于高精度航空磁测来说非常重要, 经过补偿后磁总场干扰场的剩余量的大小直接影响着磁测的精度[1, 12]。作者认为, 由于每个单位所使用的磁力仪的不同, 不能单靠补偿后的标准偏差来评价其补偿质量, 还可以引入IR值和NORM值等参数作为参考, 以及补偿后的八方向或四方向检查飞行等来综合评价。其次, 磁通门的数据也是一个重要的衡量指标, 三方向磁通门数据能够间接求出飞机的姿态角度, 对于磁补偿质量评价也是非常有效的[13]。磁通门补偿效果甚至优于姿态角补偿效果[14], 如果能在飞机上安装陀螺仪来实时记录补偿时的飞行姿态角度, 会比三分量磁通门计算出的角度更为准确可靠, 对于进一步控制磁补质量也有非常积极的意义。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|