{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
海底电磁接收机新进展
[汪海峰1, 2  , 邓明
, 邓明1, 2 , 陈凯1, 2 ]
, 邓明|
|


作者简介: 汪海峰(1981-),男,四川达州人,在读博士研究生,中国地质大学(北京)地球探测与信息技术专业,主要研究方向:电磁法仪器研发。E-mail:wanghaifengcugb@163.com
海洋电磁法广泛用于物理海洋学、地球物理学、水下目标检测等领域,以上研究及应用均建立在对海洋环境下的电磁场信号高精度观测基础上。用于海底电磁场高精度观测的海底电磁接收机,需要解决仪器的高可靠性投放回收、高稳定性水下作业、低噪声、大动态范围、低时漂等一系列技术难题。文中介绍了中国地质大学(北京)近些年来在海底电磁接收机研制方面为达到以上目标所取得的一些经验、成果以及最新进展。新海底电磁接收机的典型电场本底噪声为0.1 nV/m/
The marine electromagnetic method has been widely used in physical oceanography, geophysics and underwater target detection. These applications should be based on high precision electromagnetic signal observation in the marine environment. The ocean bottom electromagnetic receiver designed for high precise ocean bottom electromagnetic observation should overcome some technical problems such as high reliable release and recovery, high stable underwater operation, low noise level, high dynamic range, and low time drift. The research experience and results as well as the latest developments of ocean bottom electromagnetic receiver from China University of Geosciences (Beijing) were reported in this paper. The new ocean bottom electromagnetic receiver's indicators are as follows: typical E-field noise: 0.1 nV/m/
海底电磁场信号具有动态范围大、频带宽等特点。很长一段时间内, 人们认为在高导海水覆盖的海底进行电磁场观测不具备技术可行性, 直至后来海底以下发现了众多的海底硫化物、油气、水合物等, 促使地球物理学家们发展海洋电磁法用于研究海底以下介质电性结构; 同时, 受二战影响, 水下目标检测需要海洋电磁法的技术支持, 例如潜艇及舰船的泄露电磁场检测、水雷目标识别、港口安全防护等。进行海洋电磁法研究首先必须实现海洋电磁场信号的高精度观测, 其观测方法技术在西方海洋研究机构
中国地质大学(北京)电法课题组自1998年以来, 在多期“ 863计划” 课题项目及国家专项的支持下, 一直致力于海洋电磁法相关的方法理论、仪器设备、资料处理、反演解释等研究工作, 先后进行了海底大地电磁(MMT)与海洋可控源电磁法(MCSEM)方法研究
海底电磁接收机工作原理与陆地电磁观测系统大致相同, 均是借助电磁传感器对电磁场信号进行高精度观测记录[15], 区别之处在于:① 海底电磁接收机还需要完成仪器海洋环境下的投放回收, 解决水密问题; ② 海底环境条件下的电磁场信号带宽、幅值与陆地也有较大差别, 主要体现在频带低、幅值微弱、动态范围大; ③ 海底环境为无人值守环境, 且连续工作时间长。以上不同之处对仪器的稳定可靠性、本底噪声水平、动态范围、时钟漂移、连续工作时间(功低耗)等技术指标提出了严格要求。
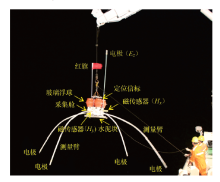
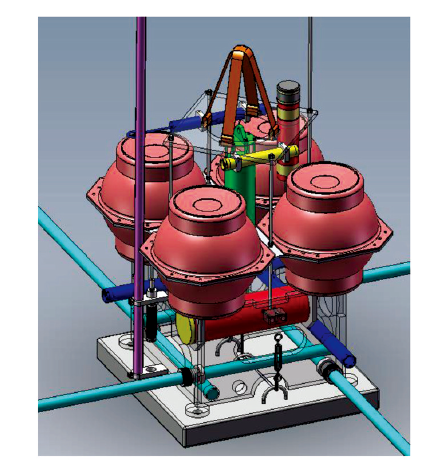
海底电磁接收机是一种机械电子高度集成化的海上装备, 主要部件从功能上分为投放回收与信号采集两大部分(图1)。投放回收部分包括水泥块、玻璃浮球、声学释放器、电腐蚀释放装置、结构框架、水下定位信标、打捞回收信标、红旗等, 其中:水泥块为仪器下沉时提供水下重量, 同时防止仪器在海底作业时受底流冲击而发生位移; 玻璃浮球为仪器上浮时提供浮力; 声学释放器完成水泥块脱钩释放; 电腐蚀释放装置区别于机械声学释放器, 借助电化学原理将不锈钢销钉熔断实现脱钩释放; 结构框架将各部件合理分布、紧固; 水下定位信标用于接收机的USBL水下声学定位; 打捞回收信标和红旗用于接收机上浮至水面后指示目标方向, 方便工作人员寻找水面目标。信号采集功能部件包括电场传感器、磁场传感器、水密电缆接插件、采集电路、压力舱、测量臂等。电场传感器为Ag|AgCl电极; 磁传感器为感应式磁传感器; 水密电缆接插件实现深水条件下信号传输; 采集电路完成传感器输出电压信号的采集和存储; 压力舱为采集电路及磁传感器提供承压条件; 测量臂将电极对间距固定为10 m。
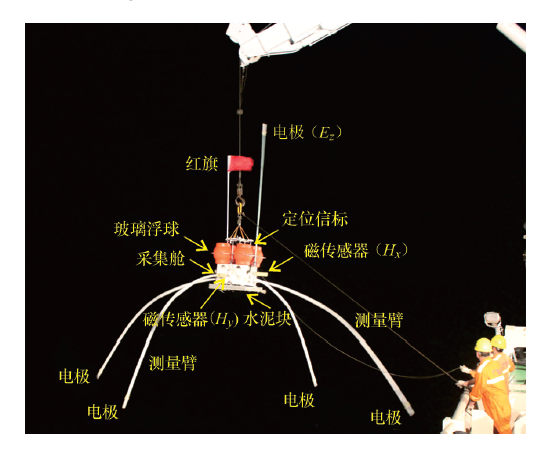 | 图1 海上作业时投放接收机 |
低噪声、大动态范围技术属于接收机的核心技术之一[16], 主要体现在低噪声电场传感器、低噪声磁场传感器、低噪声斩波放大器、大动态范围采集电路等方面。
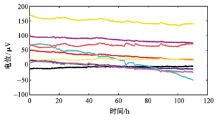
为寻求低噪声Ag|AgCl电极制备工艺, 经过大量的实验对比, 寻找到合适的电解电流密度和电解时间, 以及AgCl粉末与硅藻土的配比, 最后根据以上参数对电解工艺进行控制来制备Ag|AgCl电极。另外, 通过冷压法解决了Ag-Cu不同金属之间的焊接问题, 使其具有较低的塞贝克系数。将10支新制备的电极浸入盛有3.2%NaCl溶液中, 常温条件下测量极差漂移情况, 采样间隔1 min, 持续观测5天。极差测试结果见图2。制备的电极对典型极差小于100 μ V, 常温条件下日变化小于10 μ V/day, 本底噪声小于1 nV/
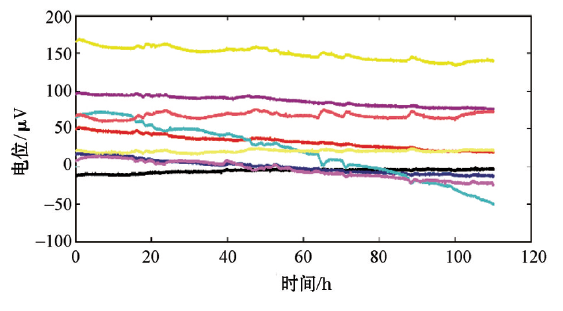 | 图2 电极极差稳定性测试结果 |
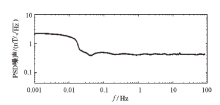
海底电磁信号频带低、幅值微弱, 需要斩波放大技术进行放大。斩波放大技术优势在于通过调制解调原理抑制低频1/f噪声[17]。斩波放大器由前端斩波器、升压变压器、AC放大器、解调器、带通滤波器, 以及必要的斩波时钟发生器、电源电路组成。升压变压器匝数比为1∶ 6, AC放大器增益设置为200。放大器通带增益为1 200, -3 dB带宽为0.01~100 Hz。放大器输入端短接, 对放大器输出噪声进行PSD测量, 结果见图3。本底噪声水平约为0.6 nV/
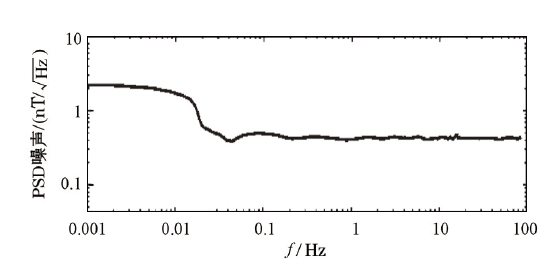 | 图3 斩波放大器噪声功率谱密度(PSD)测量结果 |
海洋环境下磁场观测原理与陆地观测基本一致, 考虑到设备自身的浮力配比, 以及水下工作时间问题, 对感应式磁场传感器在体积、重量、功耗等方面的要求更加苛刻。除了需要解决磁传感器的水密问题外, 要求设备体积重量尽可能小, 以减小承压舱体积, 从而减轻接收机的整机水中重量; 功耗尽量低, 以降低整机功耗, 延长水下连续工作时间。
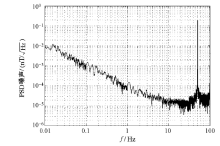
在文献[18]的基础上进行了感应式磁传感器的重新研制, 定型为CAS-10M。通过降低线圈前置放大器噪声、减小固定装置的空间同时增大磁芯空间、线圈参数优化等措施, 进一步降低了传感器的噪声; 同时通过改善线圈绕组参数, 将磁传感器外径缩小至46 mm, 长度减小至880 mm, 空气中重量4.5 kg, 功耗105 mW。对新研制的磁传感器进行了本底噪声测量, 将待测传感器置于磁屏蔽室, 连续观测4 h, 对接收机所观测的磁场噪声时间序列进行了噪声PSD计算, 计算结果见图4, 磁传感器本底噪声PSD约为0.1 pT/
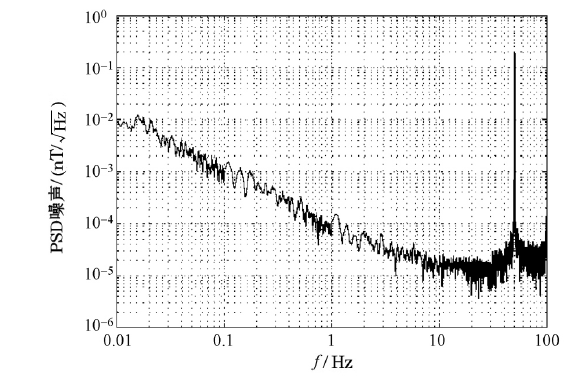 | 图4 感应式磁场传感器本底噪声PSD测量结果 |
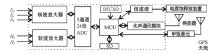
接收机数据采集电路原理简图见图5。接收机观测Ex、Ey、Ez、Hx、Hy五分量电磁场信号, 电场3通道斩波放大器为前述低噪声斩波放大器, 磁场2通道斩波放大器由单片集成斩波放大器搭建; ADC电路为5通道24位ADC, 动态范围优于120 dB(fs=150 Hz), 通道量程为± 5 V; 控制电路由32位嵌入式ARM计算机AT91SAM9G45搭建组成, 运行 2.6.13 版本Linux操作系统, 并扩展16GB SD存储卡, 支持FAT32文件系统; DTCXO为时钟部件, 为系统提供高稳时钟, 典型的频率稳定度为± 10 ppb。采集电路集成了水声通讯模块(ATM), 通过其与舱内控制电路通讯, 实现状态查询、命令电腐蚀等功能。调查船通过水声通讯模块甲板端向海底的接收机发送声学命令, 获取接收机的工作状态。控制电路收到状态查询命令返回相应状态信息, 收到电腐蚀命令后通过恒流源向外部熔断丝提供800 mA恒流, 持续供电10 min, 不锈钢销钉在电腐蚀作用下逐渐熔断。甲板控制盒辅助舱内采集电路实现参数设置、GPS授时、数据下载、内置锂离子电池充电等功能。
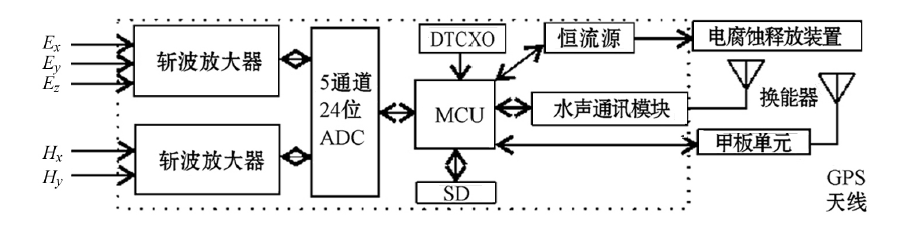 | 图5 海底电磁接收机采集电路原理 |
海底电磁接收机的第一功能就是要实现接收机自由下沉至海底, 以及工作结束后安全返回水面。这一过程主要需要解决浮力设计、结构设计、系统集成、释放、回收打捞等技术问题, 因此, 高可靠、高效率的回收技术是接收机关键支撑技术。
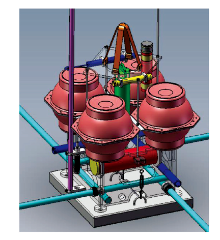
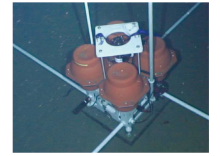
结构设计主要考虑接收机的稳定可靠性、高效装配、安全打捞、高效拆卸、便于运输等一系列问题。结构部件主要包括浮球、USBL信标、姿态测量装置、垂直测量臂、红旗、采集舱、磁传感器舱、水密电缆接插件、框架、测量臂、水泥块、钢缆、声学释放器、电腐蚀释放装置等。图6为接收机的设计结构示意, 图7给出了接收机位于海底工作时的状态, 证明接收机着底时姿态保持良好。
 | 图6 接收机结构设计 |
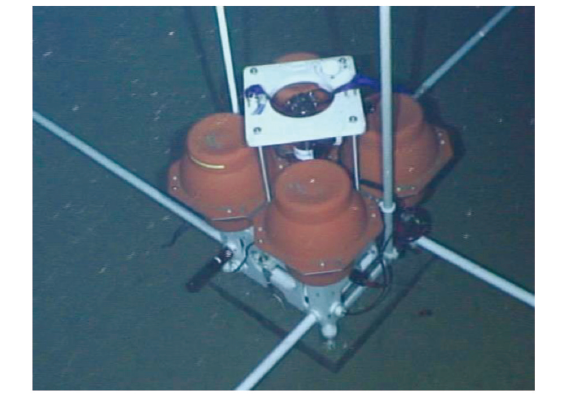 | 图7 海底工作时的接收机 (借助ROV观察并拍摄, 水深1 400 m) |
为提高接收机释放回收成功率, 采用双释放机制, 在原有声学释放器(Ixsea 2500)的基础上增加了电腐蚀释放机制。电腐蚀释放机制水下部分由外置换能器、水声通讯板、电腐蚀释放装置组成。换能器实现压电转换, 水声通讯完成甲板端对海底仪器的命令解析, 当收到“ 电腐蚀开” 命令时, 使能内置恒流源, 电腐蚀释放装置内置的不锈钢销钉在恒流源电解作用下逐渐熔断, 实现电腐蚀释放机制。水声通讯模块集成了测距、电腐蚀开、电腐蚀关等命令, 另外还实现了海底仪器状态信息传输功能, 状态信息包括仪器采集进度、电腐蚀状态、俯仰角、横滚角、方位角、电池电压等。通过这一技术手段, 实现了甲板控制端的海底仪器状态查询、电腐蚀命令等, 增加了海上作业的灵活性及可靠性。
接收机在调查船只甲板上进行水面投放, 受海流作用接收机着底过程中会发生漂移, 着底点坐标与下水点坐标存在差异, 因此需要重新定位获取水下接收机的精确位置。现有接收机通过扩展USBL水下定位信标(Sonardyne Range 2), 实现接收机的水下精确定位, 定位精度约为斜距的± 2‰ , 该水下定位技术支持船只在较高速走航条件下对目标进行定位, 极大提高了海上作业效率。同时, 水下定位技术还用于接收机释放后上浮过程的实时跟踪, 为打捞回收作业提供了空间位置信息, 对设备的高效打捞具有重要作用。
最新的海底电磁接收机与国外同类产品的主要技术指标对比见表1。
| 表1 3种海底电磁接收机技术指标对比 |
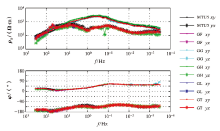
为验证采集电路的有效性, 有必要开展陆地野外试验[19]。将原本密封于压力舱内的采集电路安装在一个Pelican 1400密封盒子里, 并将Ag|AgCl电极更换为陆地常用的Pb|PbCl2不极化电极, 与加拿大Phoenix公司MT观测系统— — MTU5A进行了陆地MT模式下数据采集对比试验, 测试点位于河北省康保县郊。为获取不同仪器之间的一致性, 所有设备共用一套电极, 磁传感器平行布置, 截取相同时间段数据进行处理, 借助SSMT2000软件处理得到了视电阻率和相位曲线(图8)。测试结果表明, 5台待测海底电磁接收机(编号GF、GG、GH、GL、GT)之间的一致性较好, 且与MTU5A的测量结果较为吻合。
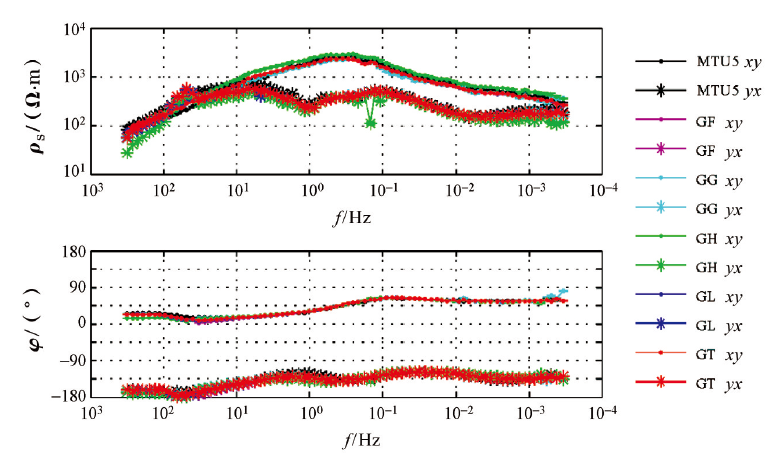 | 图8 陆地MT模式下不同仪器间的一致性测试结果 |
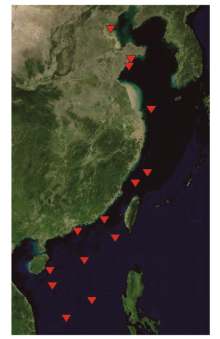
截至2016年3月, 在中国地质大学(北京)电法课题组多个项目资助下, 已在天津近海、青岛近海、南黄海、东海、汕头幅、东沙、珠江口、神狐、琼东南、三亚近海、黄岩西、中沙等海域工区(如图9所示)开展了海底MT数据采集工作, 进行了多次海底油气、水合物调查海上作业, 累计进行了约60站位的海底电磁数据采集工作。
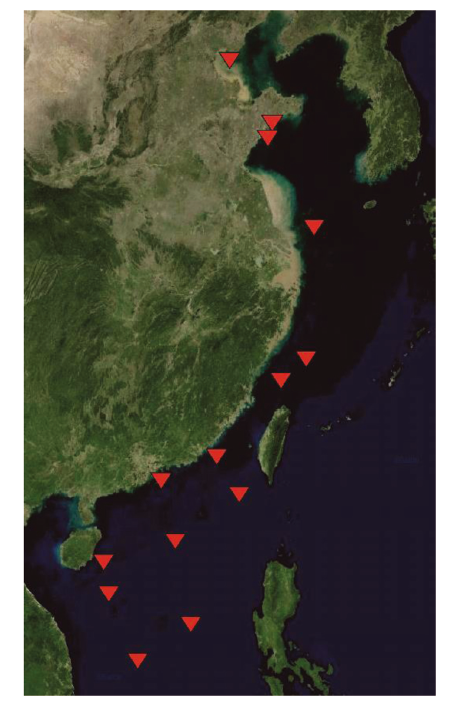 | 图9 海底电磁接收机工作站位 (截至2016年1月) |
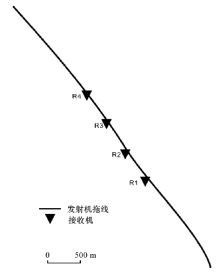
课题组成员于2015年3月搭乘广州海洋地质调查局的“ 海洋六号” 科考船进行海上作业, 主要任务为天然气水合物的海底可控源电磁数据采集, 携带了4台接收机(R1、R2、R3、R4, 见图10, 4站位间距500 m), 地点位于海南岛东南约200km处, 水深约1 400 m。接收机投放时, 台均耗时约30 min, 采集到了10天的MT数据, 并进行了可控源拖曳发射作业, 拖曳作业累计持续约16 h, 拖曳测线长20 km, 分别进行了8 Hz和0.5 Hz两组频率发射, 电流约250 A, 发射电极距120 m。借助声学释放器、水声通讯模块及电腐蚀释放装置, 4台接收机全部回收, 通过水下定位技术获得了海底接收机的坐标, 回收接收机台均耗时40 min(包括上浮时间), 数据完整。
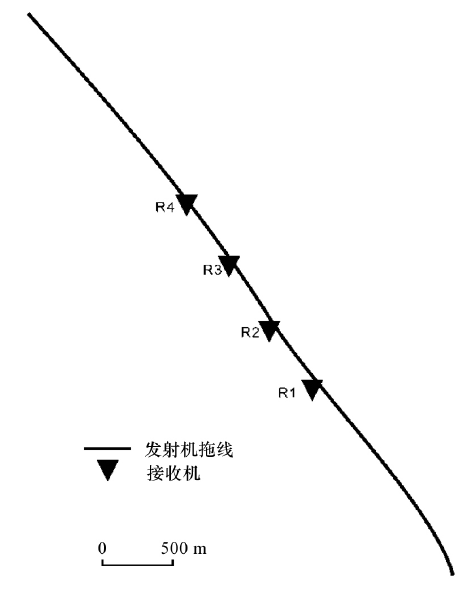 | 图10 海上施工站位 |
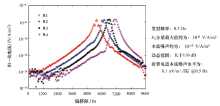
将接收机观测到的可控源电磁场分量数据经发送电流归一化、导航数据校准、姿态数据校准、方位旋转, 得到幅值偏移距(MVO)和相位偏移距(PVO)数据。图11为MVO计算结果。
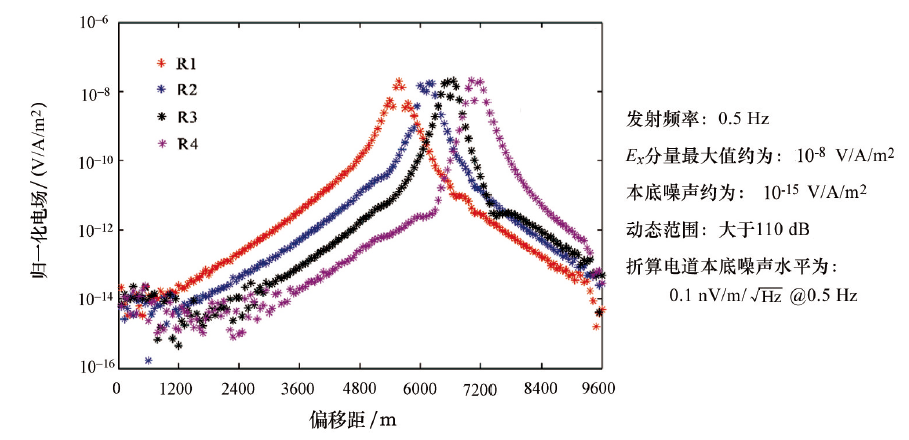 | 图11 4台接收机实测MVO计算结果 |
文中展示了海底电磁接收机在高可靠高效率海上作业、低噪声、大动态范围等方面取得的新进展。通过研制低噪声海洋电场传感器、低噪声感应式磁传感器、低噪声斩波放大器、大动态范围采集电路, 新接收机的电场本底噪声水平约为0.1 nV/m/
陆地野外对比试验结果证明了新一代的海底电磁接收机与MTU5A在MT模式下测量结果的一致性, 以及多台仪器间的一致性。2012年以来海上作业回收率达到100%, 获得了高质量MT及CSEM数据, 证明了接收机具有高可靠高效作业、低噪声、低功耗、低时漂等特点。
目前接收机已形成约30台套规模, 可用于海底天然气水合物及油气资源探测, 还可用于海底深部电性结构探测等基础地学研究领域。我们正在持续改进接收机, 下一步向小型化、更低功耗、低成本方向迈进。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|