
{kind=link}
航磁软补偿动作规范性评价
引用本文
王林飞, 薛典军, 段树岭, 何辉, 熊盛青. 航磁软补偿动作规范性评价[J]. 物探与化探, 2016,40(2): 365-369.
WANG Lin-Fei, XUE Dian-Jun, DUAN Shu-Ling, HE Hui, XIONG Sheng-Qing. The normative evaluation of aeromagnetic compensation action[J]. Geophysical and Geochemical Exploration, 2016,40(2): 365-369.
Doi:10.11720/wtyht.2016.2.21
Permissions
WANG Lin-Fei, XUE Dian-Jun, DUAN Shu-Ling, HE Hui, XIONG Sheng-Qing. The normative evaluation of aeromagnetic compensation action[J]. Geophysical and Geochemical Exploration, 2016,40(2): 365-369.
Doi:10.11720/wtyht.2016.2.21
Copyright©2016, 物探与化探编辑部
© 《物探与化探》编辑部
航磁软补偿动作规范性评价
作者简介: 王林飞(1977-),女,博士,高级工程师,主要从事航空物探方法技术研究、软件开发及信息系统建设工作。
摘要
在航磁补偿飞行中,补偿动作(侧滚、俯仰和侧滑角)是否能够达到规范要求至关重要,会直接影响补偿系数的求解。为了评价磁干扰场补偿过程,提出了利用飞机坐标系下的三轴磁通门磁力仪测得的磁场三分量和当地水平坐标系下的地磁场三分量之间的坐标系旋转关系,来解算飞机姿态角,从而评价补偿动作是否达到规定幅度要求。将该方法应用到吉林磐石测区的航磁补偿数据(带高精度姿态仪数据),得到的姿态角与高精度姿态仪AIRINS测得的姿态角比较接近,幅度误差基本在±1°以内,表明该方法可有效监控飞机飞行过程中补偿动作是否符合补偿飞行要求。
关键词:
航磁; 软补偿; 磁干扰; 补偿动作; 三分量
中图分类号:P631
文献标志码:A
文章编号:1000-8918(2016)02-0365-05
doi: 10.11720/wtyht.2016.2.21
The normative evaluation of aeromagnetic compensation action
Abstract
The problem whether compensating actions(roll,pitch and yaw angle)reach the required standard or not in aeromagnetic survey is of crucial importance in that it affects the compensation coefficient directly.In order to evaluate the magnetic field compensation process,the authors present a method to calculate the pose angle of plane using the rotation relationship between three components of magnetic field measured by three axis fluxgate magnetometer under plane coordinates and the three components of geomagnetic field measured under horizontal coordinates,and to evaluate the compensation action quality.The practicability of the method is demonstrated by applying it to aeromagnetic compensation data(with high precision attitude data)of Panshi area in Jilin,where the results of proposed method is close to that of high precision attitude instrument AIRINS within 1 degree,showing that this method can effectively monitor whether the compensation action reaches the requirements or not during the flight.
Keyword:
aeromagnetic; digital magnetic compensation; magnetic interference; compensating actions; three components
航空磁测过程中, 由于飞机自身飞行方向和运动姿态的变化, 飞机上磁性元件产生的磁场叠加在地球磁场之上会对磁力仪产生很大干扰[1, 2, 3, 4, 5, 6, 7] 。因此, 为了保证磁力仪测量精度, 需要对磁干扰场进行补偿, 消减其影响。补偿方法分为硬补偿和软补偿, 后者是目前磁力测量补偿方法的主流[5, 8], 即在开始航磁测量之前, 先在选定的矩形闭合框上进行磁补偿飞行, 获得不同姿态下飞机磁干扰场补偿系数, 在航磁测量过程中根据飞机姿态数据实时(或事后)计算磁干扰场大小, 并加以去除的方法[2, 8, 9]。
航磁测量中飞机磁干扰场大小与飞机飞行姿态变化幅度成正相关的关系, 因此, 在磁补偿飞行中, 飞机的侧滚、俯仰和侧滑动作是否能够达到规定要求至关重要, 其直接影响补偿系数的求解和磁补偿效果, 最终影响航磁测量精度。而目前只是靠检查补偿后标准差是否优于± 0.08 nT来评价补偿的质量水平[9], 并没有有效的方法来监控补偿动作是否符合要求。
磁补偿飞行时, 飞机上装载的三轴磁通门磁力仪测得的磁场三分量是磁总场在飞机坐标系下三个方向的分量投影, 而通过国际参考地磁场(IGRF)能够计算飞行过程中当地水平坐标系下的地磁场三分量。由于补偿飞行的场地是平静磁场区域, 背景场可以忽略不计, 所以地磁场三分量与飞机坐标系下磁场三分量之间存在着坐标系旋转的关系, 即飞机飞行过程中的侧滑、俯仰和侧滚引起的坐标系旋转关系[6, 7, 11]。基于此, 笔者提出了补偿动作规范性评价方法, 并采用插件技术, 在GeoProbe软件开发平台[16]上编制了软件。
1 飞机磁干扰场与飞行姿态的关系
1.1 坐标系与飞行姿态
1.1.1 飞机坐标系
飞机坐标系的坐标原点选在磁力仪探头的中心点O, yb轴与飞机纵轴平行, 正方向为机首方向; xb轴与飞机横轴平行, 正方向为左机翼方向; zb轴与平面xbOyb正交, 垂直机身, 正方向向下[6]。在做补偿飞行时, 通常将三轴磁通门磁力仪安装在飞机尾部, 并且磁力仪的三个轴互相垂直, 分别平行于飞机坐标系的xb、yb、zb轴。
1.1.2 当地水平坐标系
当地水平坐标系的原点与飞机坐标系的原点重合, xg轴指向当地北子午线, yg轴与xg轴垂直指向东, zg轴垂直向下, 与xg、yg轴正交形成右手坐标系。
1.1.3 飞行姿态
基本坐标系为飞机坐标系, 飞行姿态定义为飞机坐标系相对于当地水平坐标系的位置。飞机任意时刻的姿态都可以分解为侧滚、俯仰和侧滑的合成, 即可用侧滚角(ψ )、俯仰角(λ )和侧滑角(θ , 也叫航向角或偏航角)来表示[6]。飞机的侧滚角是指飞机坐标系的zb轴与包含yb轴的垂直平面的夹角, 右滚转为正, 取值范围为-180° ~180° 。飞机的俯仰角是指飞机坐标系的纵轴(即飞机坐标系的yb轴)与当地水平坐标系的水平面的夹角, 飞机坐标系的yb轴在水平面之下角度为正, 在水平面之上角度为负, 取值范围为-90° ~90° 。飞机的侧滑角指飞机的纵轴(即yb轴)在当地水平坐标系水平坐标面的投影与当地水平坐标系的xg轴(即正北)的夹角, 由北逆时针为正, 取值范围为0° ~360° 。若飞机的侧滑角为0° , 表示飞机机首指向正北方向; 侧滑角为90° , 表示飞机机首指向正东; 侧滑角为180° , 表示飞机机首指向正南; 侧滑角为270° , 表示飞机机首指向正西。如果飞机的侧滚角、俯仰角和侧滑角都等于零, 则表示飞机准确地沿水平直线向正北飞行。
1.2 磁干扰场与飞行姿态的关系
飞机磁干扰场主要由恒定场、感应场和涡流场组成[2, 4, 10], 如式(1)所示。恒定场是由于飞机在建造期间, 较长时间地停放在地面, 连续地受到地磁场在同一方向上的磁化而产生的硬铁磁场[3]。感应场是飞机内铁磁性物体受地磁场磁化产生的, 该磁场的大小及方向是随飞机姿态和地磁场的变化而变化的[10]。涡流场是由飞机机身、机翼等大的金属片或金属壳等软铁材料切割地磁场产生的, 其量值与飞机坐标上地磁场的变化率成比例[10]。
其中:i, j, k分别为x轴, y轴, z轴上的单位矢量, Tbx, Tby, Tbz为磁总场在飞机坐标系下三个方向的分量投影, Hx, Hy, Hz, a11, a12, a13, a21, a22, a23, a31, a32, a33, b11, b12, b13, b21, b22, b23, b31, b32, b33为补偿系数, Hxi+Hyj+Hzk, (a11Tbx+a12Tby+a13Tbz)i+(a21Tbx+a22Tby+a23Tbz)j+(a31Tbx+a32Tby+a33Tbz)k分别为恒定场和感应场, 其余部分为涡流场。
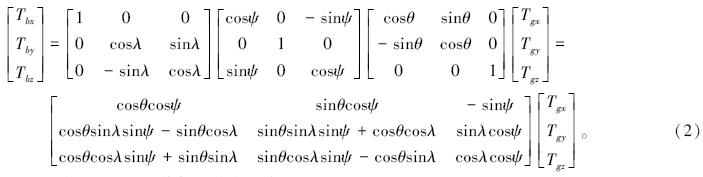
由于补偿飞行的场地是平静磁场区域, 所以地磁场三分量与飞机坐标系下磁场三分量之间存在着坐标系旋转的关系[6-7, 11], 即地磁场三分量Tgx, Tgy, Tgz, 依次转动侧滑角θ 、侧滚角ψ 和俯仰角λ , 可获得飞机坐标系下的磁场三分量Tbx, Tby, Tbz。它们之间的转换可用下式来表示:
由式(1)和(2)可知, 飞机磁干扰场大小与飞行姿态有关。此外, 对不同的飞机或同一架飞机不同的安装位置, 磁干扰场大小均不一样, 必须经过具体测试方可确定[3]。因此, 为了消除飞机引起的干扰磁场, 每架飞机在生产测量前都需要进行补偿飞行。在生产过程中, 通常出现以下两种情况后都需要进行磁补偿:一是飞机定检或检修改变了飞机磁干扰场; 二是更换仪器或磁探头。
2 航磁补偿动作规范性评价方法
磁补偿飞行的目的是要通过一系列的飞行科目确定飞机磁干扰场同飞行姿态之间的关系, 解算补偿系数。为了评价补偿的质量水平, 必须有一个统一的飞行方法和动作标准, 只有这样, 不同的校准飞行得出的指标才有可比性, 才能确立一个公认合理的评价标准。
2.1 磁补偿标定飞行方法和动作标准
按照国际惯例[12, 13, 14, 15], 磁补偿标定飞行方法和动作标准要求如下:飞机上安装航磁自动数字补偿仪, 按照正常飞行测线的要求打开机载设备且禁止通话, 在选定的平静磁场区(磁场变化最大不超过200 nT), 沿矩形闭合框四边(方向分别为0° 、90° 、180° 、270° , 或测线和切割线方向), 高度2 000 ~3 000 m(视空域情况而定), 飞行大约120 s, 每一方向分别做侧滚(幅度标准± 10° )、俯仰(幅度标准± 5° )、侧滑(幅度标准± 5° )三组动作[6, 7, 8], 每组动作约30 s, 每种动作做5~6个往复, 每组动作之间要有10 s平飞。
2.2 磁补偿动作的评价方法
可见, 评价磁补偿飞行是否按照要求开展, 关键在于评价磁补偿动作的幅度是否达到要求, 最终归结于飞行姿态角的解算。理论上, 通过式(2)可解算飞机飞行过程中的侧滚角、俯仰角和侧滑角。实际上, 式(2)是关于ψ 、λ 和θ 的非线性方程组, 无法直接求解三个姿态角。而且, 由旋转关系可知, 对于三轴磁通门磁力仪的同一组测量值, 对应于它的空域方位有无穷多个, 即姿态角是非唯一的。因此, 只利用三轴磁通门磁力仪测得的三个分量不能确定飞机运动的姿态角, 必须利用其他传感器辅助给出其中一个姿态角才能进行姿态解算。为了便于求解, 笔者将补偿动作分解, 逐个动作分析来求解姿态角。
首先, 飞机在做俯仰动作时, 侧滑角θ 和俯仰角λ 变化很小, 侧滚角可近似为零, 侧滑角可近似为飞机的航向, 则式(2)可简化为:
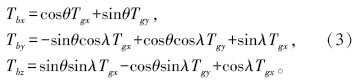
由此可得飞机的俯仰角为:
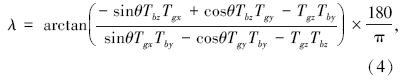
其中侧滑角θ 可近似为飞机的航向:
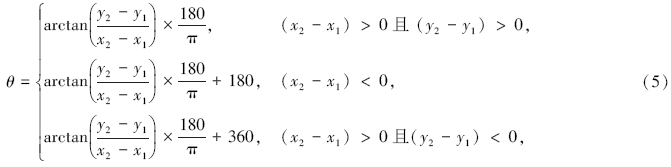
其中:(x1, y1), (x2, y2)分别为飞机当前点的坐标和下一点的坐标, 由于侧滑角的取值范围为0° ~360° , 所以根据反正切函数的特征[6], 采用四象限反正切方法进行计算, 即当(x2-x1)< 0时, 侧滑角θ =θ +180, 当(x2-x1)> 0且(y2-y1)< 0时, 侧滑角θ =θ +360。
同理, 飞机在做侧滚动作时, 侧滑角θ 和俯角λ 变化很小, 俯仰角可近似为零, 侧滑角可近似为飞机的航向, 则式(2)可简化为式(6):
由此可得飞机的俯仰角为:
最后, 将求得的侧滚角和俯仰角代入式(2)可以解算出侧滑角, 如果解非唯一时, 需要根据飞机姿态角不可能发生突变, 即满足一阶导数连续的条件, 来判断解的可靠性。
3 应用实例
笔者基于GeoProbe软件开发平台[16], 采用插件技术研发了航磁软补偿动作评价软件。计算中, 只需输入地磁场三分量、三轴磁通门磁力仪测得的磁场三分量、以及北向距和东向距, 即可进行补偿动作评价, 评价内容包括在四个特定方向上以及整架次的侧滑、俯仰和侧滚动作的幅度。
2014年6月30日, 中国国土资源航空物探遥感中心在吉林磐石测区 1:5万航空梯度及伽马能谱仪试生产开工前, 使用Y12 B3750飞机, 装载AGS-863多通道航磁自动数字补偿仪, 在哈尔滨平房机场上方3 000 m进行补偿飞行, 沿矩形闭合框逆时针飞行, 沿闭合框每条边分别做侧滚(± 10° ), 俯仰(± 5° )和侧滑(± 5° )三组动作。
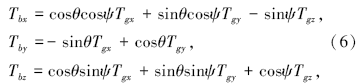
由于该测区在做补偿飞行时, 同时安装了从法国引进的高精度姿态仪AIRINS, 所以可用姿态仪测得的姿态角来检验磁补偿动作评价算法是否可靠。根据式(2)、(4)、(5)和(7), 利用地磁场三分量、三轴磁通门磁力仪测得的磁场三分量以及北向距和东向距解算出飞机姿态角。由于笔者关心的是磁补偿飞行飞机姿态的变化, 即侧滑、俯仰和侧滚动作的幅度, 因此对姿态仪实测的姿态角以及计算得到的姿态角, 采用非线性滤波(半窗口宽度60点)分别去除背景值, 然后绘图比较侧滑角、俯仰角和侧滚角幅度(图1)。由图1和表1可知, 该测区各个方向上的飞机姿态角幅度与高精度姿态仪AIRINS测得的姿态角幅度基本一致, 因此, 可以使用该方法软件对磁软补偿动作进行评价。
 | 图1 吉林磐石测区磁补偿动作(90° 方向) |
| 表1 吉林磐石测区磁补偿解算与实测姿态角幅度 |
4 结论
提出利用地磁场三分量Tgx, Tgy, Tgz和三轴磁通门磁力仪测得的飞机坐标系下的磁场三分量Tbx, Tby, Tbz之间的坐标系旋转关系来解算飞机姿态角, 并用吉林磐石测区实测磁补偿数据进行了检验, 通过与高精度姿态仪AIRINS测得的姿态角比较, 可知解算姿态角幅度误差基本在± 1° 以内, 结果表明该方法可有效监控磁补偿飞行过程中侧滚、俯仰和侧滑动作幅度是否符合标准, 从而为评价磁补偿的质量水平提供了另一种手段。此外, 利用三轴磁通门磁力仪进行地磁测量从而确定飞行姿态的方法, 也可用于弹道的修正和姿态控制等研究中, 从而满足军事上某些应用的特殊要求。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|