



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
新一代陆用MT观测系统
引用本文
陈凯, 魏文博, 邓明, 景建恩, 王猛. 新一代陆用MT观测系统[J]. 物探与化探, 2015,39(4): 780-785.
CHEN Kai, WEI Wen-Bo, DENG Ming, JING Jian-En, WANG Meng. A new magnetotelluric receiver[J]. Geophysical and Geochemical Exploration, 2015,39(4): 780-785.
Doi:10.11720/wtyht.2015.4.20CHEN Kai, WEI Wen-Bo, DENG Ming, JING Jian-En, WANG Meng. A new magnetotelluric receiver[J]. Geophysical and Geochemical Exploration, 2015,39(4): 780-785.
Permissions
Copyright©2015, 物探与化探编辑部
? 《物探与化探》编辑部
新一代陆用MT观测系统
作者简介: 陈凯(1984-),男,2008年于中国地质大学(北京)获硕士学位,现为中国地质大学(北京)实验师,主要研究
摘要
大地电磁法(MT)是地球深部探测的有效物探手段之一,也是当今地球物理工作者的研究热点。要实现MT探测,用于野外观测的仪器系统是基础,要求观测系统具有高可靠、高精度、多台同步、轻便等特点。通过集成嵌入式计算机、DTCXO、24位ADC、锂电池组等部件研制了采集主机,动态范围达119 dB( fs=2 400 Hz),功耗约 1 600 mW,并配备了轻便的低噪声感应式磁传感器、低漂移电场传感器以及用于野外仪器自检的自检盒,在提高了仪器可靠性的同时也提高了野外数据采集质量和野外施工效率。多次室内及野外试验验证了本观测系统的可靠性、低功耗、轻便性及易用性,可满足陆地MT勘探施工的要求。
关键词:
大地电磁法; MT观测系统; 大动态范围; 时间一致性; 低功耗
中图分类号:P631
文献标志码:A
文章编号:1000-8918(2015)04-0780-06
A new magnetotelluric receiver
Abstract
The magnetotelluric method (MT) is an effective means to detect the interior of the Earth. It is one of the research hotspots among geophysicists. The field observation system is the foundation of MT exploration. This method requires an observation system with some good characteristics, such as high reliability, high precision, multi-receiver synchronization and lightweight. The receiver integrates embedded computer, DTCXO, 24 Bits ADC, lithium batteries and other components. The typical dynamic range is 119 dB@( fs=2 400 Hz), and the power consumption is about 1 600 mW. The receiver is equipped with low-noise, lightweight inductive magnetic sensors, electric field sensors, and self-test box, thus ensuring the reliability of the instrument. It has improved the quality of field data acquisition, and the equipment is more portable. Several indoor and field tests have verified the reliability of the receiver. The performance and portability could meet the requirements of land MT exploration.
Keyword:
magnetotelluric; MT observation system; high resolution; time synchromeity; lower power
大地电磁测深方法(Magnetotelluric)自诞生以来一直是地球物理勘探工作者的研究热点, 广泛应用于大陆岩石圈导电性结构研究、油气、矿产、地热和水资源勘查等众多领域[1]。地球物理学是一门建立在观测基础上的实验科学, 关键在于可靠、准确的野外资料, MT方法也不例外。然而高质量原始资料的获取必须借助于高可靠、高性能的野外观测仪器[2, 3]。
目前主流MT观测仪器技术主要掌握在西方国家的少数几家公司手中[4], 如美国Zonge公司的GDP-32II系统、加拿大Phoenix公司的MTU系列、德国Metronix公司的ADU07、美国KMS的820系统以及乌克兰LIVI的LEMI-419等, 其关键技术对我国封锁, 价格昂贵, 市场已被垄断。据不完全统计, 至今国内已完成的、用于深部探测的部分MT测深工作, 共51条测线, 总长27 397 km, 包括1 416个宽频MT测点, 158个长周期MT测点。我国是国际地球内部电磁感应领域公认的MT工作量最多的国家
相对来说, 国内地球物理仪器发展普遍基础差、起步晚, MT仪器也不例外。近年来, 政府层面、研究机构逐渐开始重视基础仪器研发, 在这方面取得了长足的进展, 呈现了许多优秀成果。中国地质科学院地球物理地球化学勘查研究所林品荣[8]等人进行了大深度多功能电磁探测技术研究, 研发的多功能电磁法接收系统实现了CSAMT、AMT、IP等多种方法的观测, 并取得了显著的地质勘查效果。吉林大学程德福[9]等人进行了AMT观测仪器及宽频感应式磁传感器的研制, 林君[10]等人进行了CSAMT与IP联合探测分布式接收系统的研制。中南大学陈儒军[11]进行了嵌入式电磁法勘探仪器研制, 蒋奇云[12]进行了广域电磁测深仪的开发。中科院地质与地球物理所的底青云[13]进行了地面电磁勘探系统(SEP)研制, 该系统集成了CSAMT、AMT/MT等功能, 并进行了相关磁传感器的研制。中国地质大学(北京)在长期研制海底大地电磁仪及海底可控源电磁采集站[14]的基础上, 于2010年成功研制了陆用WMT-1大地电磁采集器[15]; 其后, 为满足深部探测需求并进一步推动仪器发展, 对该仪器的动态范围、时间一致性、功耗等技术指标进行了升级, 一方面立足自身研究基础, 一方面吸取国内外同行的先进经验, 研制出新一代陆用高可靠、高性能的MT方法专用的观测系统。
1 硬件构成
观测系统硬件由采集主机、电场传感器、磁场传感器、自检盒以及电缆等附件组成。
1.1 采集主机
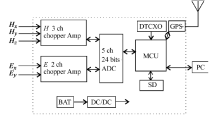
采集主机内置采集电路与锂电池组, 采集电路集成前端电场两通道斩波放大器及磁场三通道斩波放大器、五通道24位大动态范围ADC(模数转换器)、控制器、DTCXO(数字温补晶振)、GPS模块、SD卡存储器、电源模块等(图1)。斩波放大器实现前端微弱电压信号的低噪声放大滤波, 相比普通低噪声运放具有较低的1/f噪声, 有助于提高低频段信噪比; 24位ADC实现5通道模拟电压信号的同步高精度转换; DTCXO与GPS组合提供高稳时钟源, 相比传统的OCXO+GPS方案具有低功耗的优势; MCU完成ADC参数配置、数据读取、数据存储、GPS对钟、同步采集等工作; 采集电路标配16GB SD卡存储器; PC通过以太网或串口访问采集主机, 实现参数文件上传及数据文件下载; 电源模块实现锂电池电源至数字电源及模拟电源的高效率、低噪声转换。
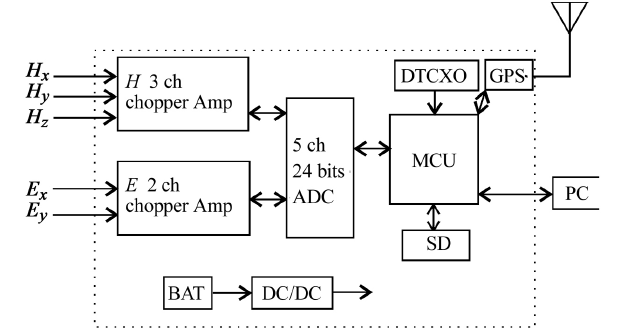 | 图1 采集主机硬件组成框图 |
所有电路安装在一个Pelican1400密封箱内; 内部集成锂电池组, 野外施工时无需配备笨重的铅酸蓄电池; 接插件均采用IP67防水等级的ITT军品接
插件; 密封箱侧面安装了高亮LED, 由其指示仪器工作状态; 以上措施大大提高了观测系统的可靠性及野外环境适用性。
1.2 电场传感器
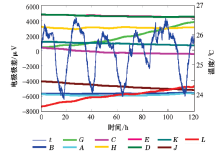
电场传感器延续使用传统的Pb/PbCl2不极化电极, 由于电极存在个体差异, 为进一步减小极差漂移对电场信号观测的影响, 通过多通道直流电压记录器对众多电极进行了同步极差漂移测试筛选, 挑选初始极差小于± 2 mV且室温条件下极差漂移尽量小的电极进行配对并投入野外实际使用。图2给出了实测10支电极120 h的极差漂移测试结果, 显示环境温度变化位于24~27 ℃区间, 其中编号E-D、A-B、C-K三对电极极差变化最小, 其余4支电极则剔除。
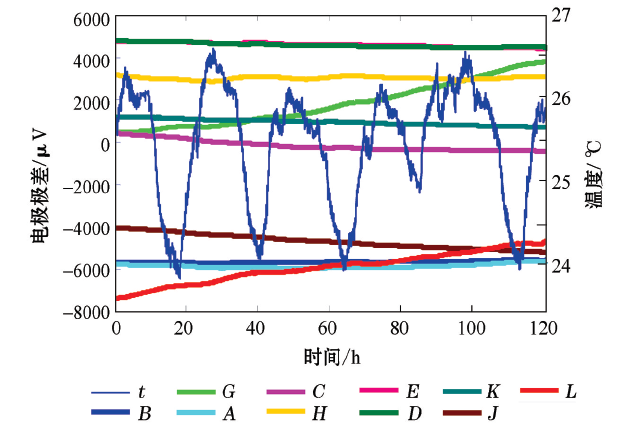 | 图2 电极极差漂移 |
1.3 磁场传感器
磁传感器的定制以保证较低的本底噪声(0.1 pT/
| 表1 主流磁传感器主要技术指标对比 |
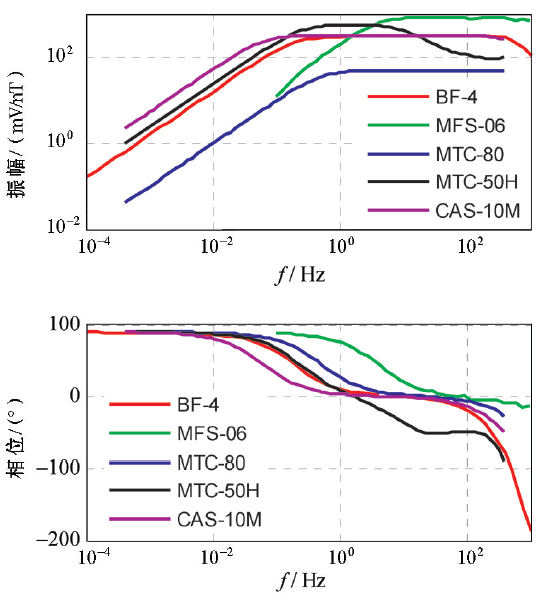 | 图3 磁传感器频响对比 |
1.4 自检盒
按照规范, 野外施工前需要进行仪器自检。自检盒作为信号源供采集主机进行自检, 具有单频信号、带时间戳的脉冲信号及双路伪随机噪声信号发生功能。其中, 单频信号为频率0.001~400 Hz可调、幅值1~1 000 mVpp的正弦信号, 用于检验通道的增益、带宽、采样率、共模抑制比、串音等指标; 脉冲信号频率为1 Hz、幅值为1 Vpp、单极性占空比1∶ 1、带有时间戳的方波信号, 用于检测时间电路的稳定性及固定延时; 伪随机噪声信号由两个独立的伪随机信号发生器生成, 其中一路产生得到Ex、Hy, 另一路产生得到Ey、Hx, 信号幅值约为5 mVpp, 用于计算理想视电阻率幅值及相位, 以检验采集电路与资料处理软件的可靠性。
2 关键技术
2.1 大动态范围技术
观测系统的动态范围直接影响野外观测数据的质量。动态范围除受电场传感器及磁传感器自身噪声影响外, 还取决于采集主机的噪声性能。通过降低前放噪声以及扩大观测量程两方面提高动态范围, 同时参考电压源及电源噪声需要进行合适处理, 电路的合理接地屏蔽不可或缺。采用低噪声斩波放大器及24位ADC, 使得动态范围典型指标达130 dB@fs=150 Hz。
2.2 时间一致性技术
MT方法要求多台观测系统的绝对时间同步, 时间一致性是不可回避的问题。采用高稳DTCXO与高精度GPS配合产生高稳时钟源, 结合MCU及RTC等硬件, 每隔一段时间进行一次GPS校时, 将时钟漂移降至最小, 并将时间信息写入时间序列数据文件中。野外环境测试表明时漂介于0.6~30 μ s/min之间, GPS信号有效条件下24 h时漂累积误差小于10 μ s, 且不同主机数据保持绝对时间一致。
2.3 低功耗技术
采集电路设计坚持低功耗原则, 主要体现在处理器、晶振、ADC、前放、传感器的低功耗处理, 高效率电源转换, 先进电源管理等多个方面。处理器采用ARM9处理器、运行Linux2.6.23版本内核; DTCXO相比传统OCXO功耗大幅降低, 典型功耗为3.3 V/3 mA; 24位ADC及前放采用低功耗大动态范围模数转换器, 典型功耗约50 mW/ch; 磁场传感器同样进行了低功耗处理, 表1对比结果表明CAS-10M具有低功耗优势。观测系统5通道全部工作、采样率2 400 Hz条件下, 功耗约1 600 mW。内置 11.1V\10.4 Ah锂电池组, 可连续工作72 h以上。
3 软件构成
该观测系统软件主要包括采集主机端软件程序以及PC端用户软件。
3.1 采集主机软件
采集主机软件包括Linux内核、驱动程序、应用程序, 配合硬件完成参数设置、GPS对钟、时间同步、ADC数据读取、数据存储、状态指示等工作。
3.2 PC端用户软件
PC端用户软件考虑到易用性, 分割为若干模块, 主要包括以下几部分:① 参数设置; ②状态提取; ③数据文件上传下载; ④时间序列显示; ⑤功率谱密度及相干系数计算; ⑥格式转换、阻抗估算; ⑦EDI文件输出、绘图。
4 测试情况
4.1 室内测试
4.1.1 动态范围测试
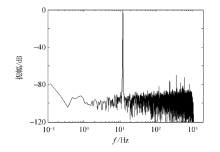
将通道量程设置为5 Vpp, 采样率设置为2 400 Hz, 输入端接入幅值为-60 dBFS(5 mVpp)、频率为12 Hz的正弦信号。连续观测一段时间后对时间序列进行傅氏变换, 结果见图4, 计算得到SNR、SINAD、SFDR分别为59.1 dB、59.1 dB、79.3 dB, 可知通道在2 400 Hz采样率、满量程输入条件下SNR将达到119.1 dB。
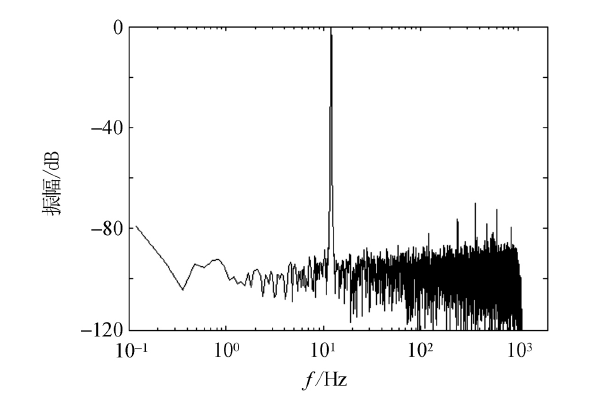 | 图4 动态范围测试结果 |
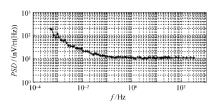
根据输入短接的噪声时间序列, 以计算采集主机的噪声功率谱密度(PSD)。将电通道输入短接, 增益设置为4、连续观测一晚约10 h, 对噪声时间序列进行PSD计算, 结果见图5。0.1 ~320 Hz频段PSD约为10 nV/
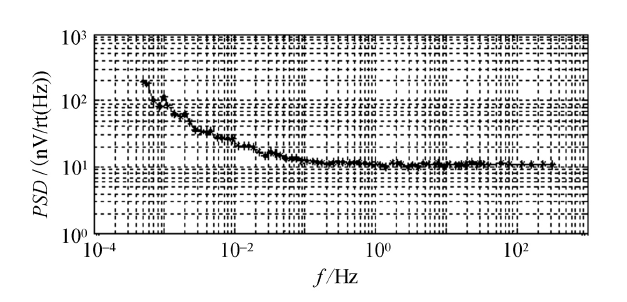 | 图5 电道本底噪声功率谱密度 |
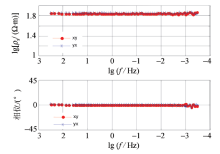
4.1.2 伪随机信号测试
将自检盒设置为伪随机信号发生模式, 接入至采集主机的Ex、Ey、Hx、Hy通道, 高频(fs=2 400 Hz)采集5 min, 低频(fs=150 Hz)采集5 h; 图6给出了将采集得到的时间序列通过自主开发的资料处理软件进行视电阻率计算结果, 显示320 ~0.0003 Hz频段内xy、yx模式视电阻率幅值约为70 Ω · m, 两个模式均方根相对误差为 0.94%、0.76%, 相位约为0° , 表明采集主机及资料处理软件工作正常, 测试手段合理可行, 达到预期目标。
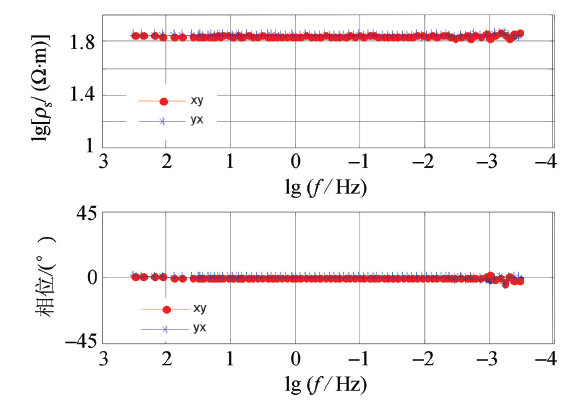 | 图6 白噪声信号自检结果 |
4.2 野外测试
4.2.1 平行观测
将两套自制观测系统(主机编号FA、FB)与一套MTU5A观测系统(主机编号2845)同时布置于同一位置, 所有电通道观测同一方向的电场信号, 所有磁道观测同一方向的磁场信号。图7给出了FA与FB的Ex、Ey时间序列对比, 可以看出曲线形态一致且具有时间一致性。
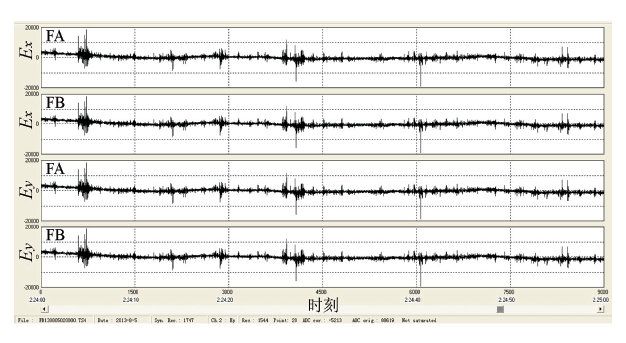 | 图7 时间序列对比示意 |
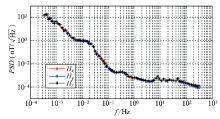
将采集的5通道天然场源MT信号, 进行PSD计算, 图8给出了磁场信号的一致性对比结果, 磁场信号的PSD分布于10-4~102 nT/
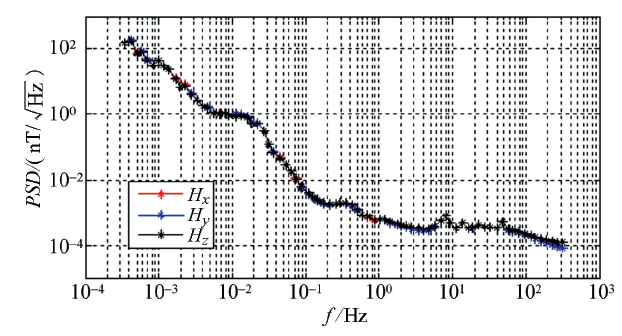 | 图8 平行测试PSD计算结果 |
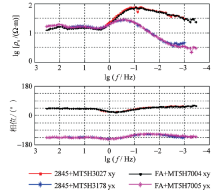
4.2.2 一致性观测
将两套观测系统置于河北省张北县郊点位同步观测, 电极距100 m, 连续观测整晚约14 h, 其中编号为2845的MTU5A观测系统接入Phoenix生产的MTC-50H磁传感器, 编号为3027、3176, 编号为FA的自制观测系统接入定制的CAS-10M磁传感器, 编号为7004、7005。图9给出了视电阻率及相位曲线。图中显示2条曲线具有较好的一致性, 且FA在低频段表现更优, 320~0.001 Hz频段两台仪器xy模式视电阻率均方根相对误差为0.95%。
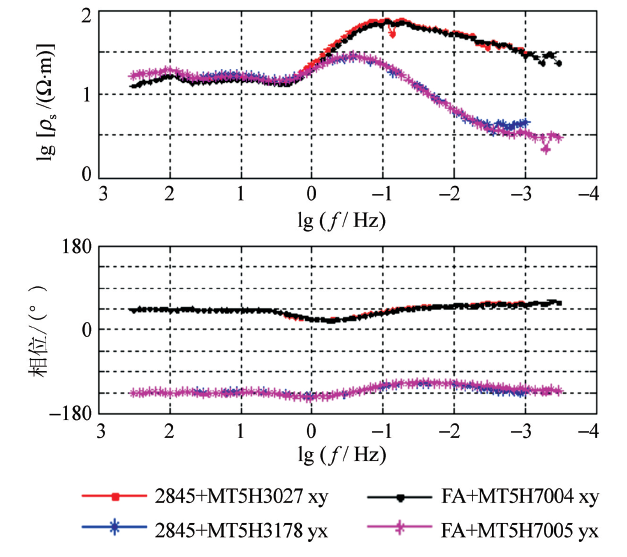 | 图9 一致性观测对比结果 |
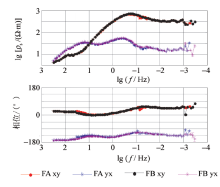
4.2.3 互参考道处理测试
将FA、FB两套观测系统置于内蒙古化德县点位十字布站进行同步观测, 电极距100 m, 连续观测整晚约14 h。图10给出了FA与FB互参考道的视电阻率及相位处理结果, 其中红、蓝两支曲线为FA的电场与磁场的计算结果, 黑、粉两支曲线为FB的电场与磁场的计算结果, 均具有较好的一致性, 320~0.001 Hz频段两台仪器xy模式视电阻率均方根相对误差为1.24%。
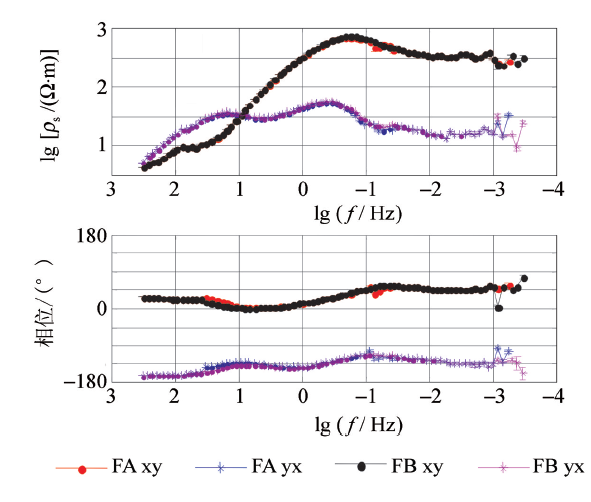 | 图10 参考道计算结果 |
5 主要技术指标
通道数:5(Ex、Ey、Hx、Hy、Hz)
动态范围:119 dB@(fs=2 400 Hz、G=1)
观测带宽:0.0005~320 Hz
本底噪声:
电道10 nV/
磁道0.1 pT/
增益:1, 4, 16, 64可选
采样率:150 Hz, 2 400 Hz
差模输入阻抗:> 10 MΩ
存储空间:> 16 GB
功耗:1 600 mW(5通道同时观测), 内置电池可连续工作72 h以上
体积重量:采集主机(34× 30× 15 cm、4 kg(含电池))、磁传感器(88× 4.5 cm、单支4.5 kg)
与MTU5A对比的实物照片见图11。
6 结论
新一代陆用MT观测系统采用嵌入式ARM+Linux技术, 集成了24位ADC、DTCXO、锂电池组, 配备了低噪声电场传感器、低噪声轻便型感应式磁传感器、自检盒, 使得观测系统具有高可靠、高性能、低功耗的特征, 综合性能达到国际同行水平。满足MT野外施工要求的同时, 还在一定程度上提高了观测数据质量及施工效率。与国外同类仪器相比, 该观测系统具有较高的性价比, 仅为同行的三分之一, 具有良好的市场前景。
致谢:感谢中国科学院电子学研究所提供的感应式磁传感器支持。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|